") LiDAR傳感器自動(dòng)駕駛技術(shù)正朝我們走得越來越近
LiDAR傳感器自動(dòng)駕駛技術(shù)正朝我們走得越來越近
隨著智能駕駛和自動(dòng)駕駛的市場(chǎng)前景被炒熱,越來越多的人進(jìn)入這個(gè)行業(yè),開發(fā)各種相關(guān)技術(shù)和產(chǎn)品。其中LiDAR傳感器開始吸引到眾多人注意。這個(gè)傳感器不僅可以應(yīng)用于ADAS(高級(jí)駕駛輔助系統(tǒng))和自動(dòng)駕駛汽車,還可以應(yīng)用于無人機(jī)、工業(yè)自動(dòng)化、地圖繪制以及機(jī)器人等其它應(yīng)用。
LiDar與雷達(dá)區(qū)別
雷達(dá)(Radar)一詞是英文“Radio Detection & Ranging”的縮寫,它與激光雷達(dá)的區(qū)別是其能量源的不同。就像其名字所表明的一樣,雷達(dá)是一種使用無線電作為其能量源的傳感器,主要用于探測(cè)目標(biāo)物體是否存在并確定其距離,有時(shí)也要確定目標(biāo)的角度位置。
激光雷達(dá)(LIDAR)是Light Detection & Ranging的縮寫,是激光探測(cè)及測(cè)距的簡(jiǎn)稱,它是一種激光器作為輻射源的雷達(dá),是激光技術(shù)與雷達(dá)技術(shù)相結(jié)合的產(chǎn)物。
LiDAR技術(shù)最早是歐美一些發(fā)達(dá)國家為了滿足海圖制圖、港口和港灣測(cè)量的特殊需要于上世紀(jì)60年代中期提出并于80年代開發(fā)出來的,一直到上世紀(jì)90年代初該技術(shù)才趨向成熟。
自動(dòng)駕駛的LiDar技術(shù)
現(xiàn)在做無人駕駛主要兩種解決方案,一種是采用激光雷達(dá)解決方案,車頂?shù)?a target="_blank">元器件稱之為L(zhǎng)iDAR,采用這種方案的有Google、百度、Uber,不過這種方案較貴,例如Google在其無人車原型中使用的Velodyne雷達(dá)售價(jià)就為7萬美金;因此,另有其他廠商采用了低成本解決方案,例如在車前車后各部署毫米波雷達(dá)和用于ADAS功能的攝像頭。
這兩種解決方案各有優(yōu)勢(shì):LiDAR,類似于鯨魚聲吶、或是蝙蝠的發(fā)聲器官,其原理是通過獲取“光脈沖打在物體上并反射回到接收器的傳播時(shí)間”,再根據(jù)光速已知的原理,將傳播時(shí)間轉(zhuǎn)換稱LiDAR據(jù)測(cè)量物的距離。也就是說,LiDAR在測(cè)距的精確性上很有優(yōu)勢(shì)。而采用“毫米波+ADAS”的視覺解決方案,對(duì)于物體的精確識(shí)別、色彩等等,可以更直接地捕捉。其實(shí)視覺解決方案對(duì)近處的距離識(shí)別也頗為精準(zhǔn),例如我們的眼睛可以輕易的辨認(rèn)出近處物體的景深。但總的來說,在較遠(yuǎn)情況下,搭配LiDAR可以產(chǎn)生更好的效果。
福特在美國亞利桑那州威特曼地區(qū)測(cè)試了一項(xiàng)夜幕中自動(dòng)導(dǎo)航行駛的測(cè)試。
在 “伸手不見五指”的福特亞利桑那汽車試驗(yàn)場(chǎng)開展此次夜間環(huán)境路測(cè),在福特汽車看來是一次向完全自動(dòng)駕駛技術(shù)開發(fā)的重要一步。也是向?qū)崿F(xiàn)“將完全自動(dòng)駕駛技術(shù)的便利帶給全球消費(fèi)者”這一承諾實(shí)質(zhì)性進(jìn)展。這項(xiàng)試驗(yàn)說明,即便缺少了依賴可視光線方可工作的攝像頭,福特使用的LiDAR傳感器的性能足夠強(qiáng)大,可以同車載虛擬駕駛軟件協(xié)同工作,操控車輛平穩(wěn)地在蜿蜒的公路上順利行駛。
這項(xiàng)測(cè)試對(duì)自動(dòng)駕駛技術(shù)雖然沒有革命性的提升,但是改進(jìn)了人們對(duì)自動(dòng)駕駛的認(rèn)識(shí),雖然對(duì)自動(dòng)駕駛技術(shù)來說,雷達(dá)、攝像頭和LiDAR激光測(cè)距、定位導(dǎo)航傳感器三者兼?zhèn)涫亲罾硐氲臓顩r,但試驗(yàn)證明,LiDAR傳感器完全具備“獨(dú)自作戰(zhàn)”的能力,即便在沒有車燈照明的情況下也能正常工作。
為了在黑暗環(huán)境中自如行駛,福特自動(dòng)駕駛測(cè)試車輛使用了高分辨率的三維地圖——這些地圖已完整包括了道路、道路標(biāo)識(shí)、地形地貌,以及指示牌、建筑、樹木等地勢(shì)地標(biāo)信息。行駛過程中,測(cè)試車輛通過LiDAR發(fā)射脈沖,以在地圖上對(duì)自己進(jìn)行精準(zhǔn)的實(shí)時(shí)定位。同時(shí),通過雷達(dá)接收到的數(shù)據(jù)能夠與LiDAR傳感器數(shù)據(jù)進(jìn)行整合,進(jìn)一步完善自動(dòng)駕駛車輛全面的傳感能力。
在沙漠測(cè)路測(cè)中,福特汽車的工程師們使用夜視鏡,在車內(nèi)及車外對(duì)測(cè)試車輛進(jìn)行了全面的觀察。夜視鏡能幫助他們清楚觀察到,車輛行駛過程中,車載LiDAR傳感器不斷向車身四周發(fā)射出網(wǎng)格狀的紅外激光射線。LiDAR傳感器能發(fā)射頻率為280萬/秒的激光脈沖,對(duì)周圍環(huán)境進(jìn)行精確掃描。
LiDAR鼻祖Velodyne的“超級(jí)冰球”
福特自動(dòng)駕駛夜測(cè)使用的這款LiDar傳感器,是Velodyne 公司最新生產(chǎn)的激光雷達(dá)測(cè)距傳感器——固態(tài)混合超級(jí)傳感器(SH Ultra PUCK Auto)——該設(shè)備因其形狀及大小類似冰球而被稱作 “超級(jí)傳感冰球”。
Velodyne最初成立于1983年,至今已有有30多年的歷史。Velodyne自1983年發(fā)明了以音波測(cè)距方式高增益伺服控制系統(tǒng),以降低及限制揚(yáng)聲器輸出所產(chǎn)生的失真。到了2005年,它發(fā)明了激光雷達(dá)。
2005年,Velodyne創(chuàng)始人 David Hall 利用立體視覺技術(shù)參與 2004 到 2005 年 DARPA (國防高等研究計(jì)劃署)無人駕駛汽車挑戰(zhàn)賽之后,最初沒有人能夠完成任務(wù),2006年,David Hall 發(fā)明了可以旋轉(zhuǎn)360度的64線的激光雷達(dá)。
Velodyne 目前已經(jīng)量產(chǎn)銷售的激光雷達(dá)有三款:分別為HDL-64E(64 線)、HDL-32E(32 線)、VLP-16(16 線)。谷歌、百度、Uber 等無人駕駛汽車多在使用其64 線產(chǎn)品。
Velodyne 64 線最早用于地圖及相關(guān)行業(yè),32 線主要用于固定翼無人機(jī)。 在過去幾年,Velodyne LiDAR 的主要訂單來自地圖行業(yè)、機(jī)器人行業(yè),以及安保行業(yè)。以安保為例,Velodyne可以通過觀察人群的流向,來發(fā)現(xiàn)異動(dòng)。
隨著無人駕駛的概念在近年的升溫, 汽車行業(yè)未來將成為一大需求來源。 福特就已在其第三代自動(dòng)駕駛車型上使用了 Velodyne 最新的激光雷達(dá)測(cè)距傳感器(LiDAR)——固態(tài)混合超級(jí)傳感器(SHUltra PUCK? Auto),之所以叫這個(gè)名字,是因?yàn)樗男螤罴按笮☆愃票蚨环Q作 “超級(jí)傳感冰球”。
LiDAR進(jìn)行物體掃描的時(shí)候,是采用作為“感知系統(tǒng)的硬件+計(jì)算功能的軟件”做成,增加激光線數(shù)后,可以減輕軟件的計(jì)算負(fù)擔(dān)。
硬件內(nèi)部的每一條線都有一對(duì)激光發(fā)射器和接收器組成,其以20 圈每秒的速度旋轉(zhuǎn),放出的激光要達(dá)到 100 米至 200 米的距離,而為保證精確測(cè)距,需要保證激光在完成這100-200米的路程后,剛好能讓發(fā)射出去的激光要被成對(duì)的接收器收到。
另外,為了保證人眼安全,Velodyne的激光雷達(dá)發(fā)射的激光線束是采用了人眼安全1級(jí)激光,平時(shí)對(duì)肉眼不可見,不過如果你采用和激光頻率接近的硬件拍攝Velodyne的這款雷達(dá),是可以看見激光線束的。
LiDAR要做到商用,價(jià)格要做到實(shí)質(zhì)性降低,目前,Velodyne的產(chǎn)品線價(jià)格區(qū)間大致是,64線8萬美元、32線4萬美元,上面用于無人機(jī)的VLP-16約為8000美元。在今年1月份拉斯維加斯上展出的SHUltra PUCK? Auto尚處于概念機(jī)階段,沒有大規(guī)模量產(chǎn)。而Velodyne LiDAR價(jià)格之所以居高不下,是因?yàn)槟壳捌錂C(jī)器都是采用手工制作,要保證激光的發(fā)射和接收不出差錯(cuò),手工組裝和調(diào)校普遍耗時(shí)。
目前Velodyne也已經(jīng)與車廠建立了合作關(guān)系,車廠會(huì)對(duì)Velodyne的新品進(jìn)行測(cè)試,預(yù)計(jì)Velodyne在2017 年將會(huì)推出迭代版本,并在2018 年第四季度推出芯片級(jí)的產(chǎn)品(期望做到500美元),并最終投放在 2020 年的車型上。
全固態(tài)LiDAR得自動(dòng)駕駛天下
機(jī)械式LiDAR依賴宏觀的轉(zhuǎn)動(dòng)部件,而混合固態(tài)LiDAR借助“微動(dòng)”器件實(shí)現(xiàn)發(fā)射端的激光束掃描功能。由于全固態(tài)LiDAR內(nèi)部沒有任何宏觀或微觀上的運(yùn)動(dòng)部件,耐久性和可靠性的優(yōu)勢(shì)不言而喻,且順應(yīng)了自動(dòng)駕駛對(duì)LiDAR固態(tài)化、小型化和低成本化的趨勢(shì),因此成為群雄逐鹿的終極方向。
未來自動(dòng)駕駛的LiDAR技術(shù)將是全固態(tài)LiDAR(SS LiDAR)的天下
LiDAR技術(shù)分類:(1)按照發(fā)射端分類:?jiǎn)吸c(diǎn)、多通道、可操縱或相控陣列、泛光面陣式;(2)按照接收端分類:?jiǎn)吸c(diǎn)、線陣、二維陣列。
目前,直接切入全固態(tài)LiDAR或者正朝著全固態(tài)LiDAR轉(zhuǎn)型的國內(nèi)外企業(yè)數(shù)量已逐步超越機(jī)械式LiDAR和混合固態(tài)LiDAR領(lǐng)域。
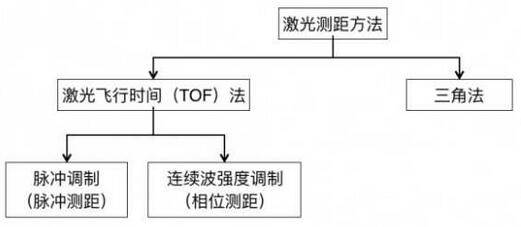
激光雷達(dá)測(cè)距方法分為飛行時(shí)間法和三角法兩大類。目前,汽車全固態(tài)激光雷達(dá)大多采用飛行時(shí)間法。
按照全固態(tài)LiDAR發(fā)射端照明方式可以分為激光多束發(fā)射、可操縱或相控陣列、泛光面陣發(fā)射三種模式。
按照全固態(tài)LiDAR探測(cè)端的接收技術(shù),可以分為相干接收技術(shù)和直接接收技術(shù)。直接接收技術(shù)是接收光子能量的直接形式,優(yōu)點(diǎn)是技術(shù)簡(jiǎn)單和成熟。相干接收技術(shù)的接收靈敏度,速度分辨率高,但需要接收機(jī)的頻帶特別寬,對(duì)激光發(fā)射的頻率穩(wěn)定度的要求也高,對(duì)光學(xué)天線系統(tǒng)和機(jī)內(nèi)光路的校準(zhǔn)的要求更嚴(yán)格,信息處理單元更復(fù)雜。
全固態(tài)LiDAR按照發(fā)射端的光波特性和接收端的探測(cè)技術(shù)進(jìn)行分類及代表企業(yè)
無人駕駛的技術(shù)方案目前還在不斷地完善中,市場(chǎng)上有聲音認(rèn)為自動(dòng)駕駛汽車并不一定需要LiDAR,也有說自動(dòng)駕駛汽車需要LiDAR和先進(jìn)的攝像頭、雷達(dá)傳感器協(xié)同配合,才能實(shí)現(xiàn)真正的自動(dòng)駕駛;更有試驗(yàn)證明,LiDAR傳感器完全具備“獨(dú)自作戰(zhàn)”的能力。但這都說明,自動(dòng)駕駛技術(shù)正朝我們走得越來越近。
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753077 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13784瀏覽量
166388 -
LIDAR
+關(guān)注
關(guān)注
10文章
326瀏覽量
29414
原文標(biāo)題:自動(dòng)駕駛的LiDar技術(shù)
文章出處:【微信號(hào):WW_CGQJS,微信公眾號(hào):傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論