
") 開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下自定義圖形標(biāo)刻
開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下自定義圖形標(biāo)刻
前面課程我們講述了如何通過Ubuntu+Qt進(jìn)行振鏡校正(詳情點(diǎn)擊→開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下的激光振鏡校正),本節(jié)自定義圖形標(biāo)刻是在振鏡校正的前提下實(shí)現(xiàn)的。在正式學(xué)習(xí)之前,我們先了解一下正運(yùn)動(dòng)技術(shù)的ZMC408SCAN-V22運(yùn)動(dòng)控制器,ZMC408SCAN-V22支持在Linux環(huán)境進(jìn)行開發(fā)使用。
01ZMC408SCAN-V22硬件介紹
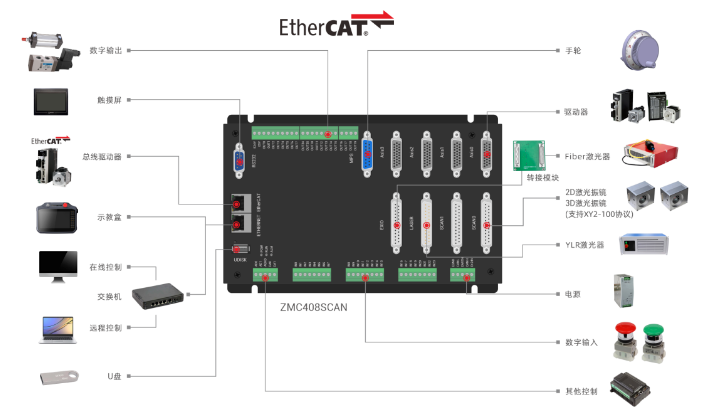
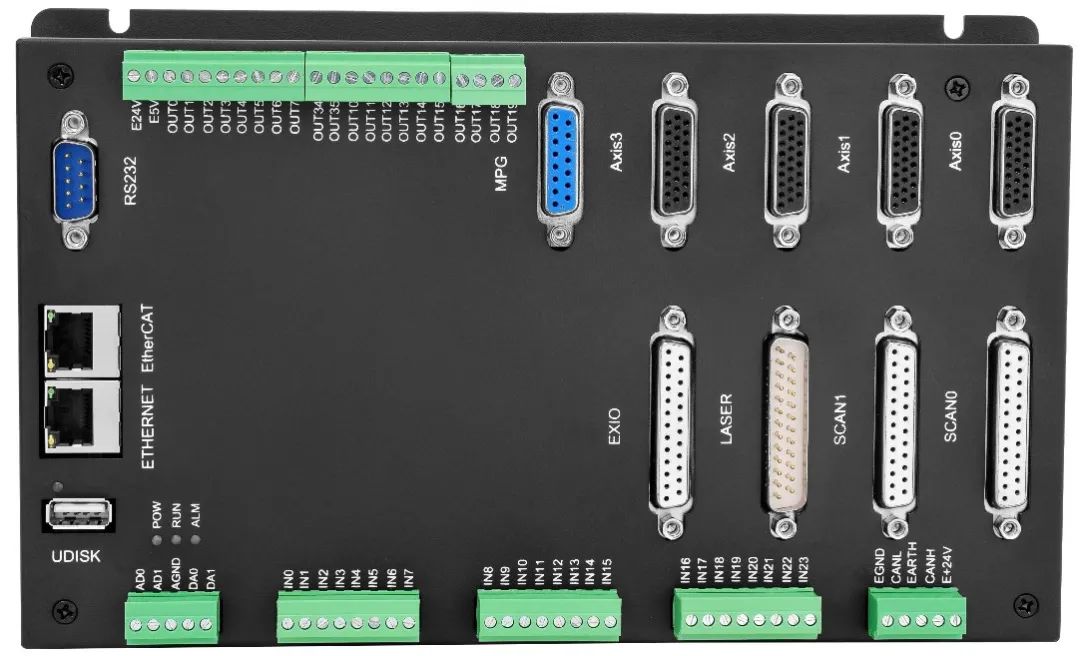
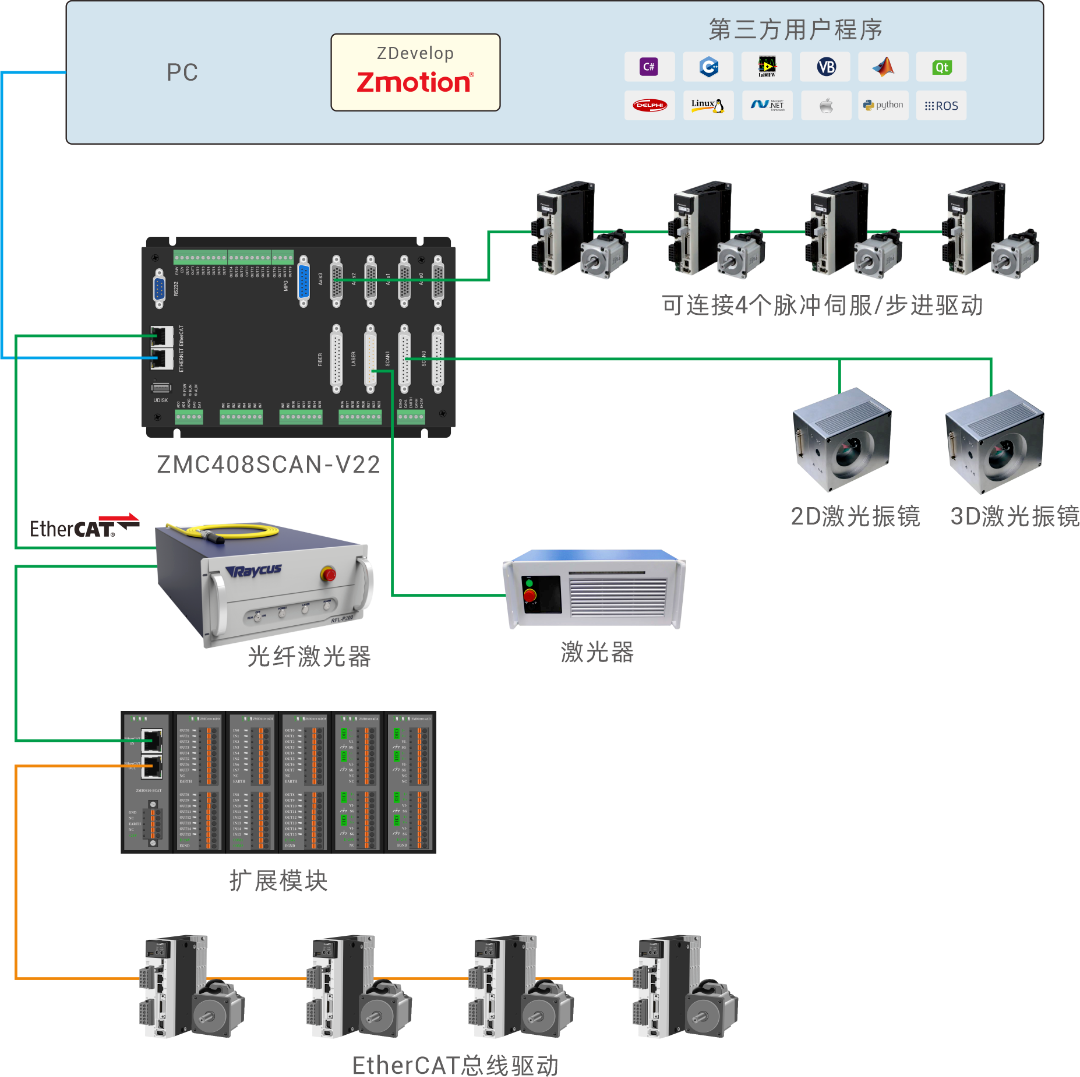
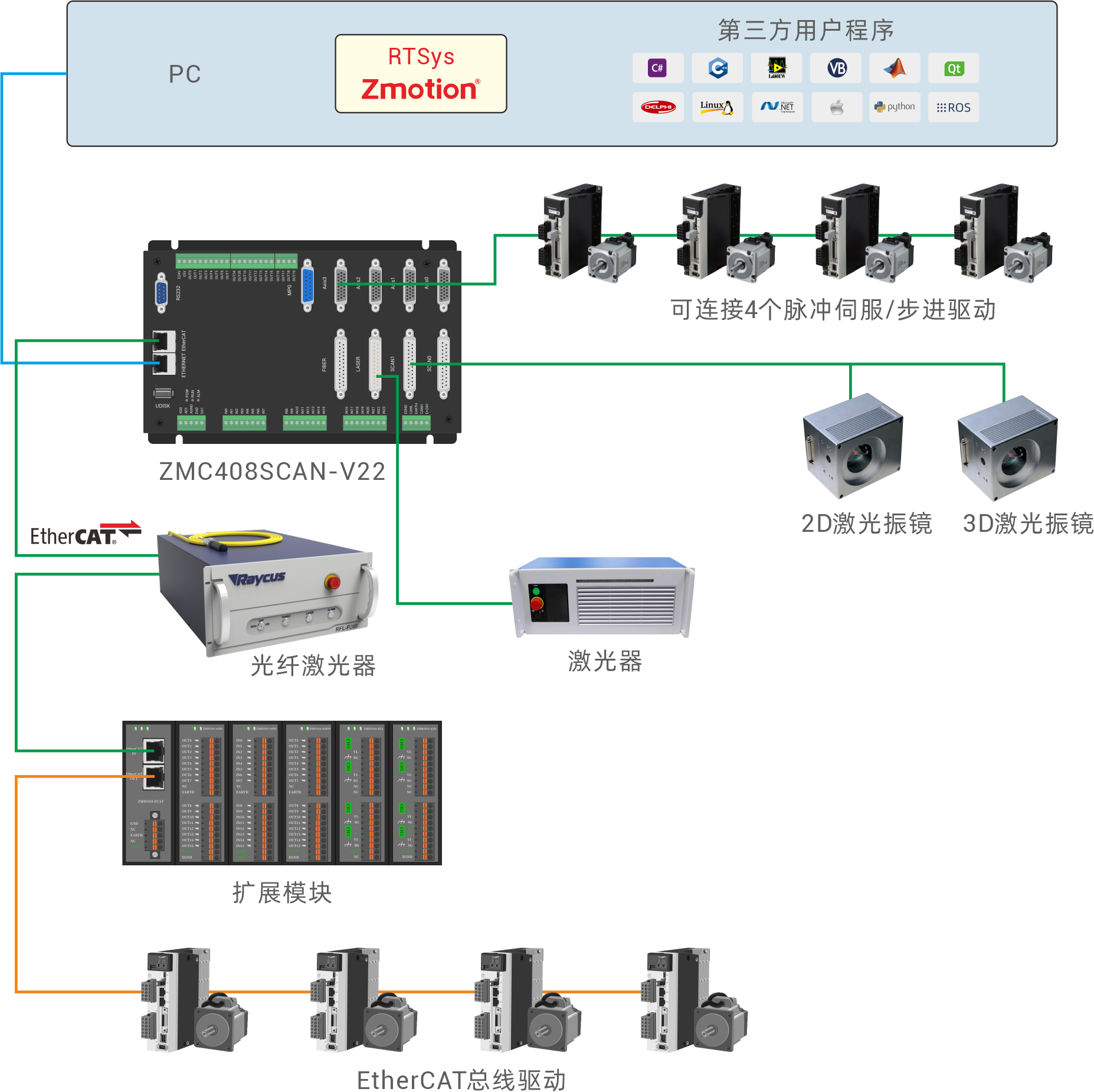
ZMC408SCAN-V22是正運(yùn)動(dòng)技術(shù)推出的高性能雙振鏡運(yùn)動(dòng)控制器,集成了2個(gè)百兆以太網(wǎng)口,支持EtherCAT、EtherNET、CAN、RS232、RS485、24路通用數(shù)字輸入、20路通用數(shù)字輸出、2路通用模擬量輸出、2路通用模擬量輸入、4個(gè)本地差分脈沖軸接口、1個(gè)MPG手輪編碼器接口、2個(gè)帶反饋振鏡接口、1個(gè)LASER激光專用接口、1個(gè)FIBER激光器接口。開放式系統(tǒng)框圖如下所示:
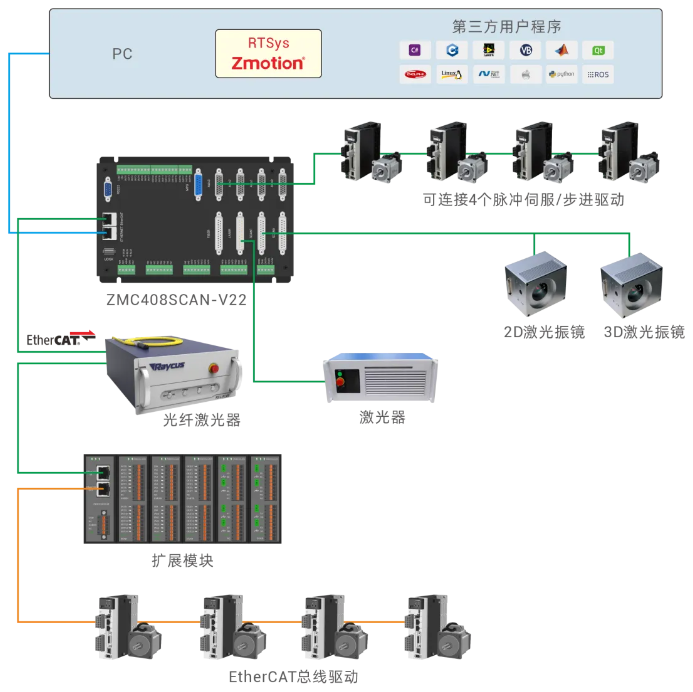
ZMC408SCAN-V22總線控制器支持EtherCAT總線連接,支持最快500μs的刷新周期,支持最多達(dá)16軸運(yùn)動(dòng)控制,支持直線插補(bǔ)、任意圓弧插補(bǔ)、空間圓弧、螺旋插補(bǔ)、電子凸輪、電子齒輪、同步跟隨、虛擬軸設(shè)置等;采用優(yōu)化的網(wǎng)絡(luò)通訊協(xié)議可以實(shí)現(xiàn)實(shí)時(shí)的運(yùn)動(dòng)控制。

ZMC408SCAN-V22通過CAN、EtherCAT總線可以連接各個(gè)擴(kuò)展模塊,從而擴(kuò)展數(shù)字量、模擬量或運(yùn)動(dòng)軸。可以在 Windows,Linux,Mac,Android,Wince各種操作系統(tǒng)下開發(fā),提供vc,c#,vb.net,labview等各種環(huán)境的dll庫。上位機(jī)軟件編程參考《ZMotion PC函數(shù)庫編程手冊》。
02 Ubuntu+Qt進(jìn)行自定義圖形標(biāo)刻項(xiàng)目的開發(fā)
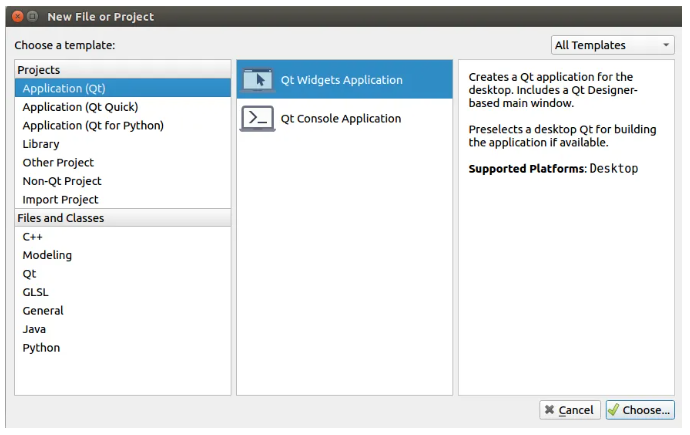
1.在Qt Creator菜單選擇“文件”→“新建文件或項(xiàng)目...”,打開創(chuàng)建項(xiàng)目向?qū)А_x擇Application項(xiàng)目集,創(chuàng)建Qt Widgets Application項(xiàng)目,設(shè)置項(xiàng)目名稱和保存位置。
2.導(dǎo)入廠家提供的相關(guān)函數(shù)庫及頭文件。
(1) 將zmotion.h和zmcaux.h、zmcaux.cpp以及l(fā)ibzmotion.so庫復(fù)制到新建的項(xiàng)目文件夾中。

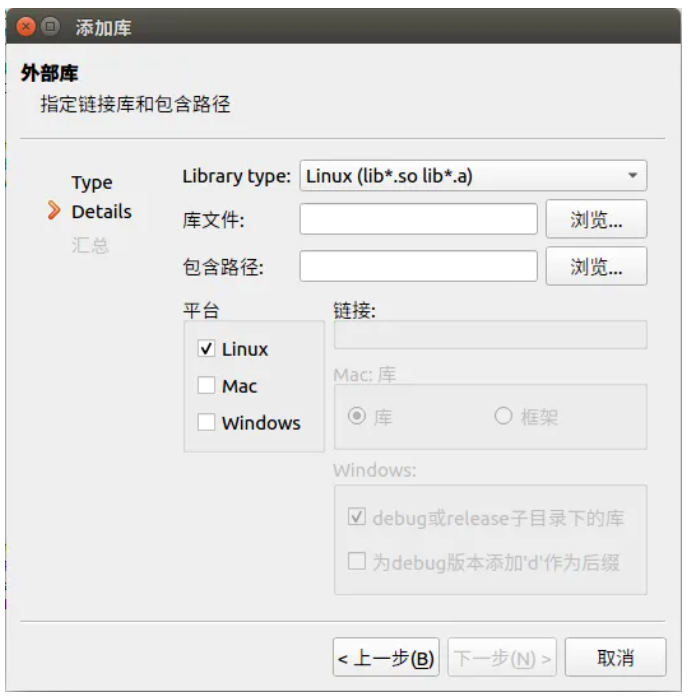
(2) 在Qt Creator選擇新建的Qt項(xiàng)目右擊選擇“添加庫...”→“外部庫”點(diǎn)擊下一步,將剛才復(fù)制到項(xiàng)目文件夾上的libzmotion.so庫文件導(dǎo)入到項(xiàng)目中。
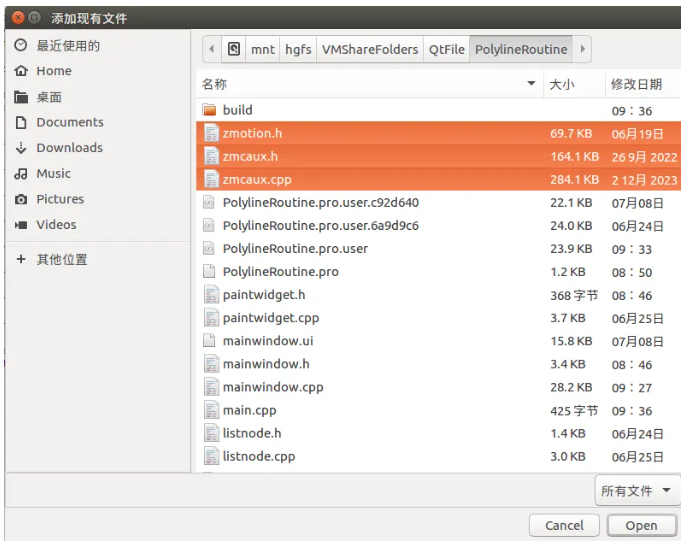
(3) 在Qt Creator下右擊新建的Qt項(xiàng)目,選擇“添加現(xiàn)有文件...”,將之前復(fù)制到項(xiàng)目文件下的頭文件zmotion.h以及zmcaux.cpp和zmcaux.h添加到項(xiàng)目中。
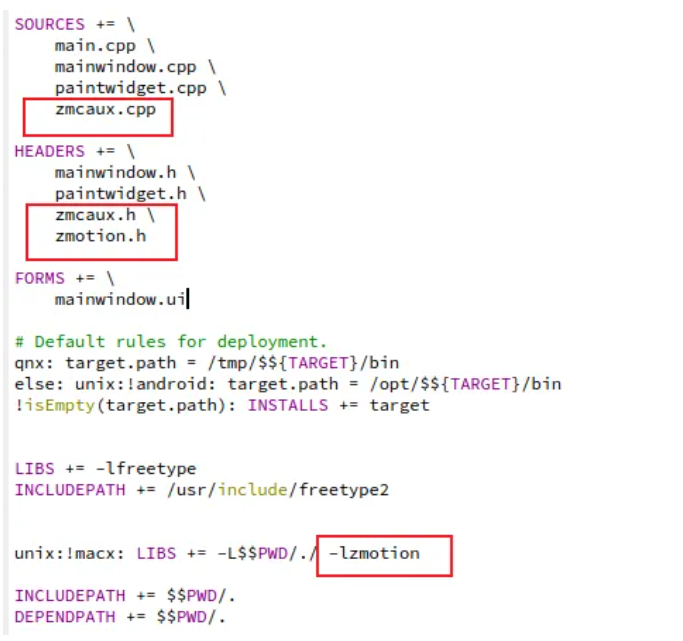
(4) 函數(shù)庫添加成功后,打開pro文件可以看到相關(guān)的函數(shù)庫和頭文件信息。此時(shí)已經(jīng)將例程需要用到的函數(shù)庫和頭文件都加入到項(xiàng)目中了,接下來開始實(shí)現(xiàn)例程。
03 自定義圖形標(biāo)刻流程以及相關(guān)函數(shù)介紹
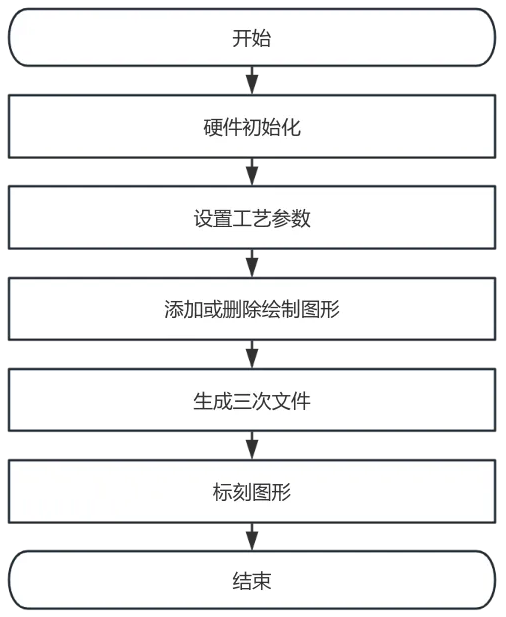
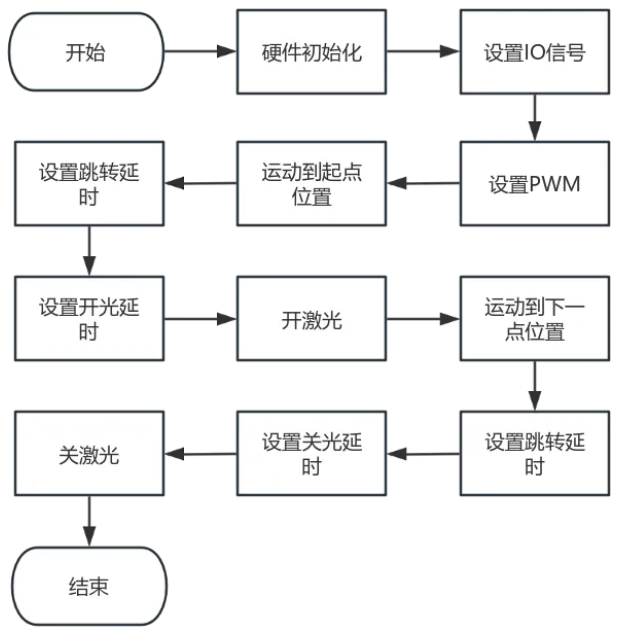
1.自定義圖形標(biāo)刻流程圖
2.相關(guān)函數(shù)介紹
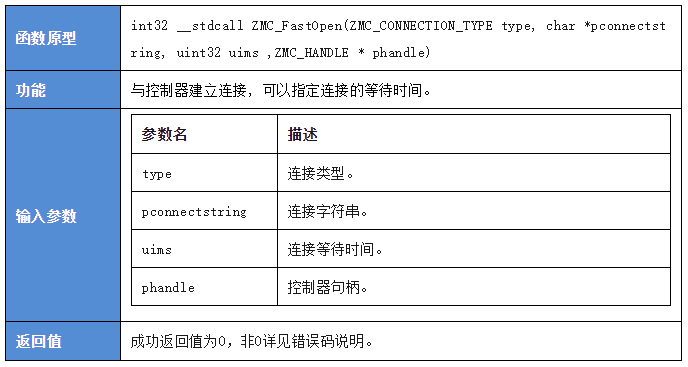
(1)連接控制器
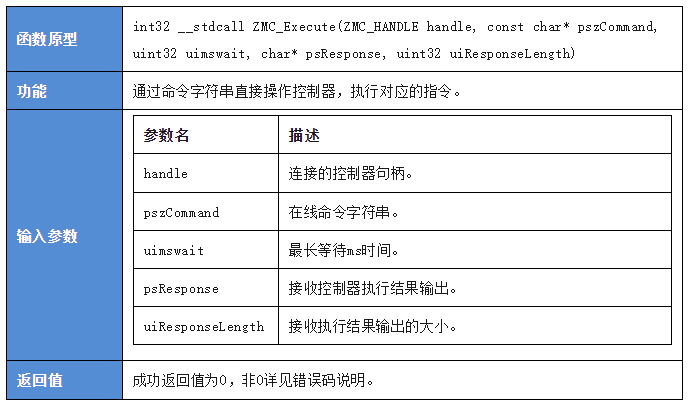
(2)通用命令執(zhí)行接口
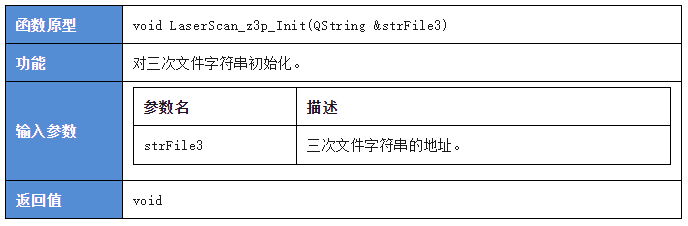
(3)三次文件初始化
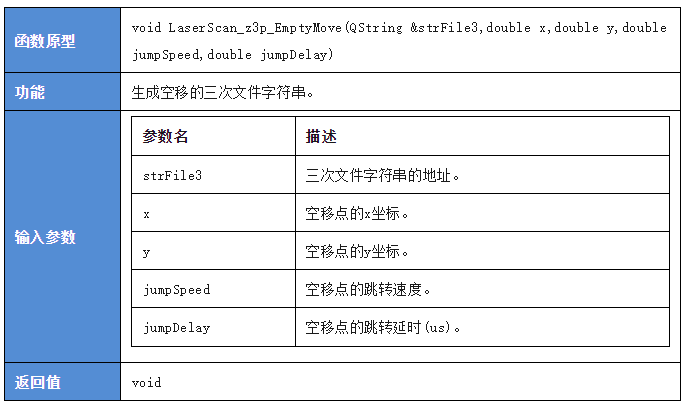
(4)生成空移字符串
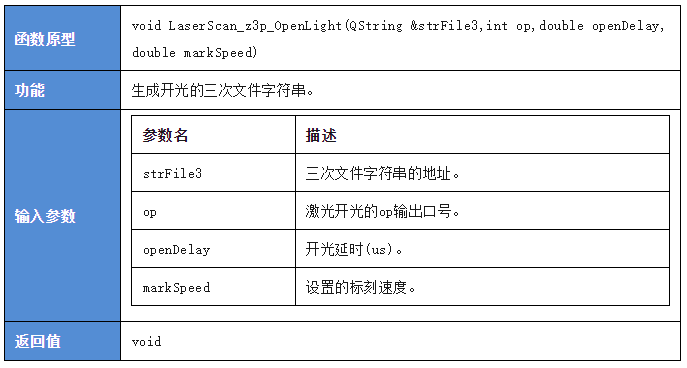
(5)生成開光字符串
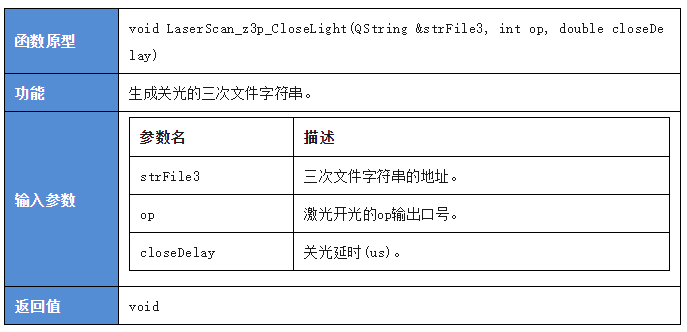
(6)生成關(guān)光字符串
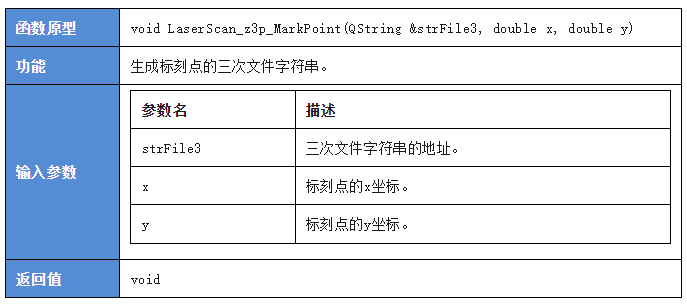
(7)生成標(biāo)刻點(diǎn)字符串
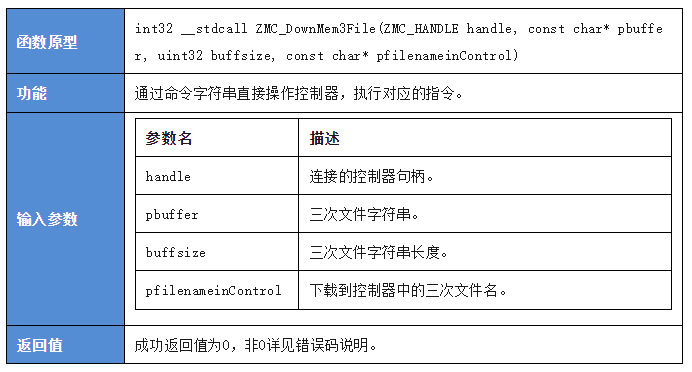
(8)下載三次文件
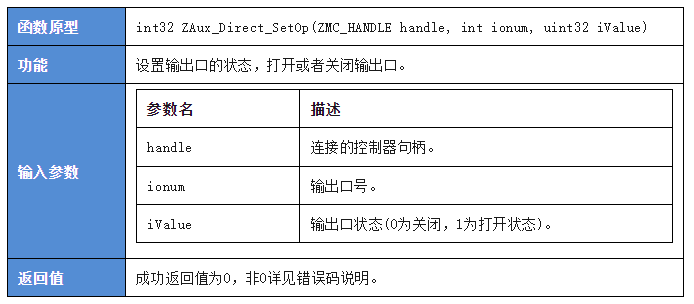
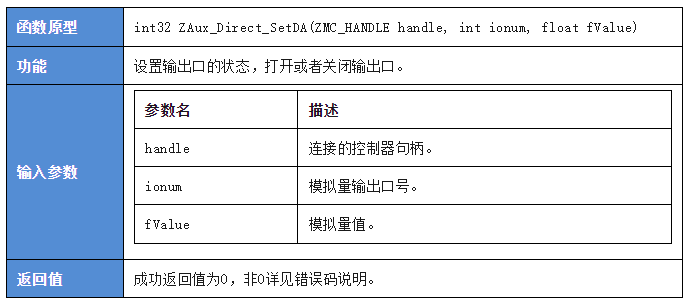
(9)設(shè)置輸出口狀態(tài)
(10)設(shè)置模擬量輸出
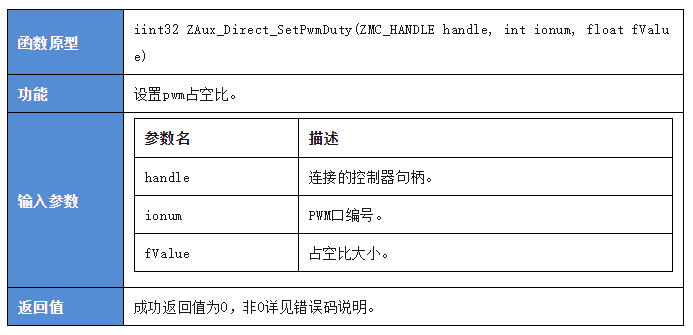
(11)設(shè)置pwm占空比
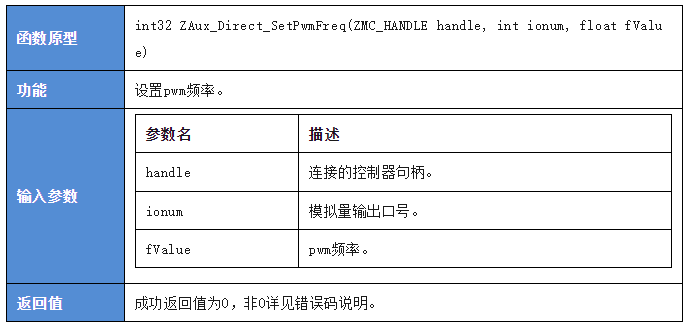
(12)設(shè)置pwm頻率
04 自定義圖形標(biāo)刻的實(shí)現(xiàn)例程
自定義圖形標(biāo)刻例程主要是通過選擇簡單圖形來生成標(biāo)刻的三次文件,控制器運(yùn)行三次文件標(biāo)刻對應(yīng)的圖形,例程中的三次文件主要通過字符串追加的形式生成,在將所有圖形的繪制過程生成三次文件后下載到控制器即可。
1.建立控制器連接,設(shè)置相關(guān)的振鏡和工藝參數(shù),可以通過設(shè)置模擬量口和pwm以及激光器使能信號,可以打開或者關(guān)閉激光。
voidMainWindow::on_ip_open_clicked()
{
char*tmp_buff=newchar[16];
QStringstr=ui->ip_Address->text();
QByteArrayba=str.toLatin1();
tmp_buff=ba.data();
if(0!=g_handle)
{
ZAux_Close(g_handle);
}
int32iresult=ZMC_FastOpen(ZMC_CONNECTION_ETH,tmp_buff,1000,&g_handle);
if(0!=iresult)
{
QMessageBox::warning(this,"提示","連接失敗");
return;
}
ZAux_Direct_SetDA(g_handle,markPara.PowerDA,markPara.Power);//設(shè)置模擬量
ZAux_Direct_SetPwmDuty(g_handle,markPara.PwmIo,0.5);//設(shè)置占空比
ZAux_Direct_SetPwmFreq(g_handle,markPara.PwmIo,markPara.PwmFreq);//設(shè)置頻率
ZAux_Direct_SetOp(g_handle,io_value.emit_io,0);//關(guān)閉激光輸出口
ZAux_Direct_SetOp(g_handle,io_value.enable_io,0);//關(guān)閉激光器使能
}
2.生成初始化的三次文件字符串
可以將標(biāo)刻過程中初始化的部分寫到相關(guān)的函數(shù)里面,包括設(shè)置初始化的激光器參數(shù)、標(biāo)刻起點(diǎn)、延時(shí)參數(shù)等,方便在標(biāo)刻自定義圖形的過程中直接使用。三次文件字符串本質(zhì)是將basic指令進(jìn)行拼接處理,將所有指令拼接完成后,可以直接寫入控制器中執(zhí)行。
voidMainWindow::LaserScan_z3p_Init() { strFile3.clear(); strFile3+=QString("BASE(%1,%2)n").arg(4).arg(5);//設(shè)置軸號 strFile3+="ATYPE=21,21n";//設(shè)置軸類型 strFile3+="UNITS=100,100n";//設(shè)置脈沖當(dāng)量 strFile3+="AXIS_ZSET=3,3n";//開啟精準(zhǔn)輸出 strFile3+="MERGE=1,1n";//開啟連續(xù)插補(bǔ) strFile3+=QString("OP(%1,ON)n").arg(io_value.enable_io); strFile3+=QString("MOVE_AOUT(%1,%2)n").arg(markPara.PowerDA).arg(static_cast(markPara.Power*255/100)); strFile3+=QString("MOVE_PWM(%1,0.5,%2)n").arg(markPara.PwmIo).arg(markPara.PwmFreq); strFile3+=QString("DECEL_ANGLE=%1,%2n").arg(15.0/180.0*M_PI).arg(15.0/180.0*M_PI); strFile3+=QString("STOP_ANGLE=%1,%2n").arg(90.0/180.0*M_PI).arg(90.0/180.0*M_PI); strFile3+=QString("ZSMOOTH=%1,%2n").arg(markPara.CorDelay).arg(markPara.CorDelay);//拐角延時(shí)時(shí)間 strFile3+=QString("FORCE_SPEED=%1n").arg(markPara.JumpSpeed);//空移速度 strFile3+="MOVESCANABS(0,0)n";//移動(dòng)到0位 }
3.生成標(biāo)刻自定義圖形的三次文件字符串
自定義圖形本質(zhì)上可以分解為線段進(jìn)行繪制,在進(jìn)行激光標(biāo)刻時(shí)也是采用線段的形式,在生成自定義圖形時(shí),只需要控制每一條線段的起始點(diǎn)和結(jié)束點(diǎn)位置,同時(shí)在起始點(diǎn)和結(jié)束點(diǎn)的位置控制延時(shí)參數(shù),最后在完成繪制時(shí)關(guān)閉激光和使能即可。下面是部分生成三次文件字符串以及下載的代碼。
voidMainWindow::on_create_File3_clicked()
{
LaserScan_z3p_Init(strFile3);
ListNode*ps=layers->next;
do
{
Coordinate*pData=ps->data;
if(ps->type==1)//標(biāo)刻點(diǎn)
{
LaserScan_z3p_EmptyMove(strFile3,pData->next->x,pData->next->y,markPara.JumpSpeed,markPara.JumpDelay);
LaserScan_z3p_OpenLight(strFile3,io_value.emit_io,markPara.OpenDelay,markPara.MarkSpeed);
LaserScan_z3p_MarkPoint(strFile3,pData->next->x,pData->next->y);
LaserScan_z3p_CloseLight(strFile3,io_value.emit_io,markPara.CloseDelay,markPara.JumpDelay);
}
elseif(ps->type==2)//標(biāo)刻直線
{
LaserScan_z3p_EmptyMove(strFile3,pData->next->x,pData->next->y,markPara.JumpSpeed,markPara.JumpDelay);
LaserScan_z3p_OpenLight(strFile3,io_value.emit_io,markPara.OpenDelay,markPara.MarkSpeed);
LaserScan_z3p_MarkPoint(strFile3,pData->next->x2,pData->next->y2);
LaserScan_z3p_CloseLight(strFile3,io_value.emit_io,markPara.CloseDelay,markPara.JumpDelay);
}
elseif(ps->type==3)//標(biāo)刻圓弧
{
LaserScan_z3p_Arc(pData->next->x+ps->radius,pData->next->y-ps->radius,ps->radius,ps->angle,ps->radian,0,0);
}
elseif(ps->type==4)//標(biāo)刻整圓
{
LaserScan_z3p_Arc(pData->next->x+ps->radius,pData->next->y-ps->radius,ps->radius,0,360,0,0);
}
......//標(biāo)刻其他類型
ps=ps->next;
}while(ps!=layers);
}
4.設(shè)置運(yùn)行任務(wù)號,啟動(dòng)任務(wù)進(jìn)行標(biāo)刻
三次文件已經(jīng)下載到控制器中,這個(gè)時(shí)候可以通過ZMC_Execute函數(shù)輸入命令去運(yùn)行生成的三次文件,完成圖形的標(biāo)刻。下面的啟動(dòng)任務(wù),進(jìn)行標(biāo)刻的部分實(shí)現(xiàn)代碼。
voidMainWindow::on_but_Mark_clicked()
{
if(0==g_handle)
{
QMessageBox::warning(this,"提示","控制器未連接!");
return;
}
QStringCmd;
charResponse[1024];
//設(shè)置啟動(dòng)任務(wù)號,執(zhí)行Zmc_polyline.z3p
ZMC_Execute(g_handle,"FILE3_RUN"Zmc_polyline.z3p",7",500,Response,1024);
}
5.設(shè)置配置文件信息,保留配置參數(shù)
通過生成ini配置文件信息,在程序加載時(shí)讀取文件,程序關(guān)閉時(shí)將配置數(shù)據(jù)寫到ini配置文件中,以此實(shí)現(xiàn)保留最后一次的使用參數(shù),方便下一次加載使用。通過使用內(nèi)部函數(shù)庫QSettings實(shí)現(xiàn)的,下面是部分的實(shí)現(xiàn)代碼。
voidMainWindow::saveINI()
{
//保存配置數(shù)據(jù)信息
QSettings*iniWrite=newQSettings("config.ini",QSettings::IniFormat);
iniWrite->setValue("laserType",ui->laser_List->currentIndex());
.....
deleteiniWrite;
}
voidMainWindow::readINI()
{
//讀取配置文件數(shù)據(jù)
QSettings*iniRead=newQSettings("config.ini",QSettings::IniFormat);
intlaserType=iniRead->value("laserType").toInt();
ui->laser_List->setCurrentIndex(laserType);
.....
deleteiniRead;
}
05自定義圖形標(biāo)刻的實(shí)現(xiàn)效果
1. 打開Qt繪制的基本圖形界面,設(shè)置基本的激光器參數(shù)和運(yùn)動(dòng)參數(shù)。
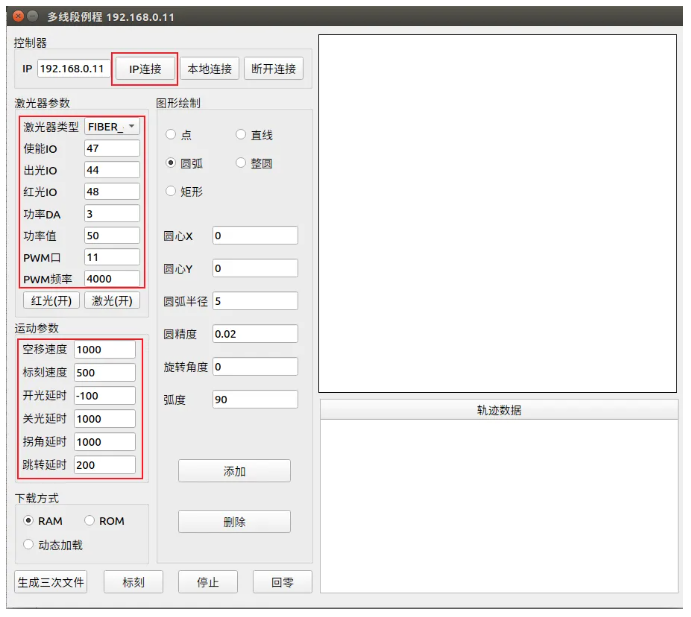
2. 添加想要標(biāo)刻的自定義圖形,設(shè)置圖形參數(shù),選擇添加圖形,例程中添加的圖形為點(diǎn)、矩形、整圓、圓弧、直線,點(diǎn)擊生成三次文件后,查看三次文件的內(nèi)容。
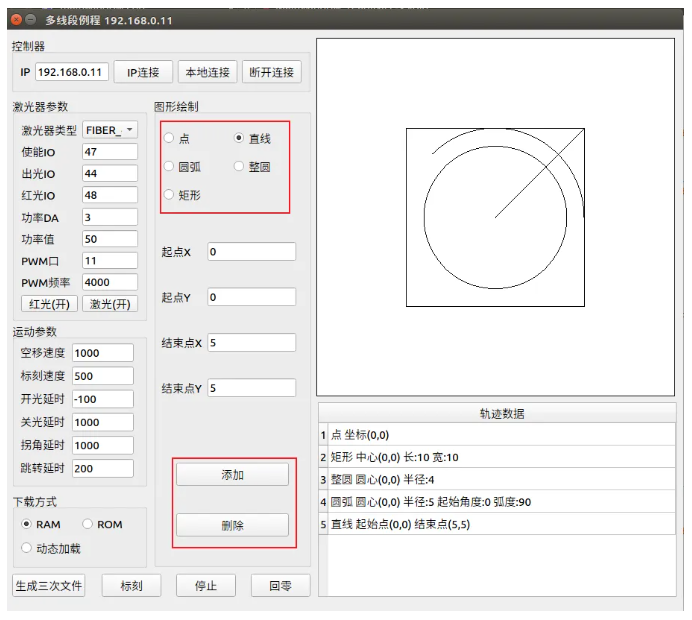
3. 點(diǎn)擊標(biāo)刻即可完成已選自定義圖形的標(biāo)刻。
4.分析生成的三次文件信息,下面是生成三次文件的部分內(nèi)容,三次文件的開頭都是對軸參數(shù)加工參數(shù)的設(shè)置,當(dāng)移動(dòng)到運(yùn)動(dòng)起始點(diǎn)時(shí),設(shè)置開光參數(shù)和延時(shí)參數(shù),在軌跡完成時(shí)設(shè)置關(guān)光延時(shí)和關(guān)光操作。
BASE(4,5) ATYPE=21,21 UNITS=100,100 AXIS_ZSET=3,3 MERGE=1,1 OP(47,ON) MOVE_AOUT(3,127) MOVE_PWM(11,0.5,4000) DECEL_ANGLE=0.261799,0.261799 STOP_ANGLE=1.5708,1.5708 ZSMOOTH=1000,1000 FORCE_SPEED=1000 MOVESCANABS(0,0) FORCE_SPEED=1000 MOVESCANABS(0.00000,0.00000) MOVE_DELAY(0.2,1) FORCE_SPEED=500 MOVEOP_DELAY=-0.1 MOVE_OP(44,ON) MOVESCANABS(0.00000,0.00000) MOVEOP_DELAY=0 MOVE_DELAY(1) MOVE_OP(44,OFF) FORCE_SPEED=1000 MOVESCANABS(-5.00000,5.00000) MOVE_DELAY(200,1) FORCE_SPEED=500 MOVEOP_DELAY=-0.1 MOVE_OP(44,ON) MOVESCANABS(5.00000,5.00000) MOVESCANABS(5.00000,-5.00000) MOVESCANABS(-5.00000,-5.00000) MOVESCANABS(-5.00000,5.00000) MOVEOP_DELAY=0 MOVE_DELAY(1) MOVE_OP(44,OFF)
06 激光標(biāo)刻過程
激光標(biāo)刻的過程,初始化、空移、開光、標(biāo)刻、關(guān)光都封裝成函數(shù)接口,在進(jìn)行標(biāo)刻時(shí),調(diào)用相關(guān)的函數(shù)接口即可生成對應(yīng)的三次文件字符串。
完整代碼獲取地址▼
本次,正運(yùn)動(dòng)技術(shù)開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下自定義圖形標(biāo)刻,就分享到這里。
更多精彩內(nèi)容請關(guān)注“正運(yùn)動(dòng)小助手”公眾號,需要相關(guān)開發(fā)環(huán)境與例程代碼,請咨詢正運(yùn)動(dòng)技術(shù)銷售工程師:400-089-8936。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。
正運(yùn)動(dòng)技術(shù)專注于運(yùn)動(dòng)控制技術(shù)研究和通用運(yùn)動(dòng)控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術(shù)企業(yè)。正運(yùn)動(dòng)技術(shù)匯集了來自華為、中興等公司的優(yōu)秀人才,在堅(jiān)持自主創(chuàng)新的同時(shí),積極聯(lián)合各大高校協(xié)同運(yùn)動(dòng)控制基礎(chǔ)技術(shù)的研究,是國內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國內(nèi)少有、完整掌握運(yùn)動(dòng)控制核心技術(shù)和實(shí)時(shí)工控軟件平臺技術(shù)的企業(yè)。
審核編輯 黃宇
-
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
424瀏覽量
24973 -
Ubuntu
+關(guān)注
關(guān)注
5文章
575瀏覽量
30442 -
運(yùn)動(dòng)控制系統(tǒng)
+關(guān)注
關(guān)注
0文章
92瀏覽量
14253 -
激光振鏡
+關(guān)注
關(guān)注
1文章
21瀏覽量
3407
發(fā)布評論請先 登錄
相關(guān)推薦
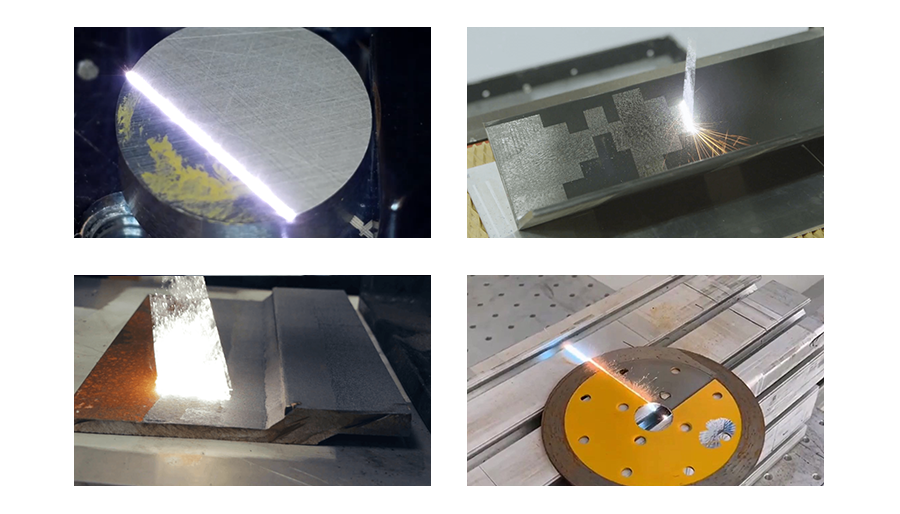
ZMC408SCAN振鏡控制光纖激光器加工
開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下的激光振鏡校正# 激光振鏡# 運(yùn)動(dòng)控制器# 運(yùn)動(dòng)控制# 正運(yùn)動(dòng)

開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下的文本標(biāo)刻 #正運(yùn)動(dòng)技術(shù) #激光振鏡 #運(yùn)動(dòng)控制器 #正運(yùn)動(dòng)

開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下CAD圖形標(biāo)刻 #正運(yùn)動(dòng)技術(shù) #激光振鏡 #運(yùn)動(dòng)控制器
振鏡式激光打標(biāo)控制器的工作原理及其電路設(shè)計(jì)

激光振鏡運(yùn)動(dòng)控制器(一):ZMC408SCAN接口與功能
開放式激光振鏡運(yùn)動(dòng)控制器:C++快速開發(fā)

應(yīng)用ZMC408SCAN開放式激光振鏡運(yùn)動(dòng)控制器的C++開發(fā)
ZMC408SCAN振鏡控制光纖激光器加工的方法
開放式激光振鏡運(yùn)動(dòng)控制器:C++振鏡矯正方法與實(shí)現(xiàn)

開放式激光振鏡運(yùn)動(dòng)控制器ZMC408SCAN進(jìn)行振鏡矯正的方法與實(shí)現(xiàn)
如何實(shí)現(xiàn)激光打標(biāo)控制
開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下的文本標(biāo)刻
開放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下CAD圖形標(biāo)刻





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論