 剖析現代無人機地位和作用及其飛控關鍵技術
剖析現代無人機地位和作用及其飛控關鍵技術
無人機系統以其機動靈活、持久飛行和“零傷亡”等特點幾乎滲透到戰場空間的各個領域。近期幾次局部戰爭中無人機的突出表現,更加引起了各國軍方,尤其是軍事強國的高度重視,已成為信息武器裝備體系的關鍵節點和重要組成部分,在信息支援、信息對抗和火力打擊等領域發揮著不可替代的作用。
與有人駕駛飛機相比,無人機的優勢主要體現在以下五個方面:
一是可長時間執行空中任務;
二是可替代有人駕駛飛機進入核/生/化等污染環境執行任務;
三是不存在飛行員傷亡,政治和軍事風險較小;
四是由于不考慮人的因素,可承受更大的載荷,飛機的隱身和機動性上可實現質的飛躍;
五是全壽命費用低、作戰效費比高。與衛星相比,無人機系統具有時效性、針對性和靈活性強等優勢。
無人機的地位和作用
無人機是奪取信息權的有利工具
無人機能夠提供長期持久的戰場信息支持服務,可實時獲取和戰場信息,具有多維一體、全域覆蓋、持續實時、準確精細的信息感知能力;不同類型不同高度的無人機系統組成了覆蓋戰場低空至臨近空間區域范圍的通訊、導航和定位等信息支持網絡,形成靈活、機動、多層次、立體化的空基和近天基綜合信息支持能力,提高了指揮的效率,增強了作戰的聯合性和靈活性。
無人機是未來戰場信息對抗的重要支柱
信息對抗,是指對敵方信息系統實施電子干擾、電子欺騙、電子誘餌、網絡攻擊、和反輻射摧毀。不同類別的無人機系統能夠滿足戰略、戰役、戰術多層次的信息對抗能力的需要,能夠提供“軟”“硬”不同類型的信息對抗手段,提供從戰術信息對抗支援到戰略戰役信息對抗打擊的作戰能力,實現對敵方信息系統全頻段、全時域、全天候的信息攻擊,形成多層次的信息作戰力量體系框架。
無人機將成為空中作戰的主導力量
無人機將具備時敏目標察打能力、對敵縱深重要目標精確打擊能力、臨近空間作戰能力和跨大氣層作戰能力,成為21世紀空中作戰的主導力量。在聯合作戰中,無人作戰飛機可執行防空壓制任務,協調各種力量對敵領土縱深實施打擊;無人機與地面和海上力量配合,可為地面和海上兵器指示目標和實施火力校射,提高打擊精度;無人機還可以執行戰斗求援、戰場管理、戰區導彈防御、反雷、心理戰等。
無人機是執行最危險任務的最佳選擇
高技術信息化戰爭使用精確制導武器的比重越來越大,核、生、化武器并存,殺傷力增大,參戰人員將面臨巨大危險。因此,無人機能夠代替有人機執行最危險的任務,最大限度地避免人員傷亡。
無人機的技術基礎
航空技術的發展是推動無人機技術發展的基礎。無人機是依賴空氣動力承載飛行的航空器,如何讓無人機能夠穩定可靠飛行,性能越來越好,這依賴于航空技術的應用和發展。
航空技術包括空氣動力技術、飛行動力學技術、航空結構技術、航空材料技術、航空發動機技術、飛行控制與導航技術、航空電子電氣技術等,早期的航空技術發展主要解決無人機等飛行器能夠飛行的問題,現代航空技術的發展促進無人機向飛行性能越來越高、飛行可靠性越來越好、執行任務的能力越來越強的方向發展。
無線數據鏈技術的發展是推動無人機向可用化和實用化發展的條件。由于無人機是機上無人駕駛,必須靠地面控制站通過無線數據鏈實現對其操縱控制和飛行狀態監視,因此無線數據鏈是推動無人機向可用化和實用化的條件。現代數據鏈技術的發展使得無人機數據鏈向著高速、寬帶、保密、抗截獲、抗干擾能力強的方向發展,推動無人機實用化能力越來越強。
無人機發展的主要關鍵技術
未來無人機向更高、更快、更遠、更機動、更高效的方向發展,需要的主要關鍵技術有:
1、平臺技術(綜合布局、氣動、輕質結構、隱身);
2、大尺寸復合材料設計(規范)、加工工藝(成本);
3、結構復合材料,抗紫外線材料,輕質材料,耐高溫材料等;
4、微型加工裝配技術、智能材料的應用(無舵面柔性機翼,微型、仿生無人機);
5、先進的發射回收技術;
6、武器和設備的小型化及集成化;
7、隱身技術;
8、動力技術;
9、通信技術;
10、智能控制技術;
11、空域管理技術;
無人機飛行控制技術
飛行控制與管理系統是無人機的關鍵系統之一。飛行控制系統是無人機完成起飛(發射)、空中飛行、執行任務、返場著陸(回收)等整個飛行過程的核心系統,對無人機實現全權限控制與管理,因此對無人機的功能和性能起關鍵、決定性作用。如果沒有飛行控制系統,現代無人機就不可能上天飛行,完成各種任務。
無人機飛行控制系統一般包含傳感器、機載計算機和伺服作動設備三大部分。
無人機控制模式
無人機的飛行控制系統是全時限、全權限的,飛行控制模式可以分為程序控制(時間程序控制)、遙控(通過地面站遙控指令控制)和自主飛行控制(二維、三維或四維)三種。
前二種飛行控制方式常用作靶機、觀測等類型無人機的飛行控制,第三種常用于偵察機、攻擊機等類型無人機的飛行控制。
在遙控方式下,地面操作手根據無人機的狀態信息和任務要求控制無人機的飛行;
在自主控制方式下,飛行控制系統根據傳感器獲取的飛機狀態信息和任務規劃信息自動控制無人機的飛行。
在半自主控制方式下,飛行控制系統一方面根據傳感器獲取的飛機狀態信息和任務規劃信息自主控制無人機的飛行,另一方面,接收地面控制站的遙控指令,改變飛行狀態。
機載傳感器
無人機飛控系統常用的傳感器包括角速率傳感器、姿態傳感器、航向傳感器、高度空速傳感器、飛機位置傳感器、迎角傳感器、過載傳感器等。傳感器的選擇應根據實際系統的控制需要,在控制律初步設計與仿真的基礎上進行。
1、角速率傳感器
角速率傳感器是飛控系統的基本傳感器之一,用于感受無人機繞機體軸的轉動角速率,以構成角速率反饋,改善系統的阻尼特性、提高穩定性。
角速率傳感器的選擇要考慮其測量范圍、精度、輸出特性、帶寬等。
角速率傳感器應安裝在無人機重心附近、一階彎振的波節處,安裝軸線與要感受的機體軸向平行,并特別注意極性的正確性。
2、姿態、航向傳感器
姿態傳感器用于感受無人機的俯仰和滾轉角度,航向傳感器用于感受無人機的航向角。姿態、航向傳感器是無人機飛行控制系統的重要組成部分,用于實現姿態航向穩定與控制功能。
姿態、航向傳感器的選擇要考慮其測量范圍、精度、輸出特性、動態特性等。
姿態、航向傳感器應安裝在飛機重心附近,振動盡可能要小,有較高的安裝精度要求。
對于磁航向傳感器要安裝在受鐵磁性物質影響最小且相對固定的地方,安裝件應采用非磁性材料制造。
3、高度、空速傳感器(或大氣數據計算機)
高度、空速傳感器(或大氣數據計算機)用于感受無人機的飛行高度和空速,是高度保持和空速保持的必備傳感器。一般和空速管、通氣管路構成大氣數據系統。
高度、空速傳感器的選擇主要考慮測量范圍和測量精度。其安裝一般要求在空速管附近,盡量縮短管路。
4、飛機位置傳感器
飛機位置傳感器用于感受飛機的位置,是飛行軌跡控制的必要前提。慣性導航設備、GPS衛星導航接收機是典型的位置傳感器。
飛機位置傳感器的選擇一般考慮與飛行時間相關的導航精度、成本和可用性等問題。
慣性導航設備有安裝位置和較高的安裝精度要求,GPS接收機的安裝主要應避免天線的遮擋問題。
引導設備
精確引導是無人機自動著陸的基礎。由于使用簡易的機場,顯然不可能使用一般的儀表著陸系統或者微波著陸系統。在此前提下,還有如下方法可供選擇。
1)全球定位系統(GPS):GPS是目前為止定位精度最高的導航設施,在世界各國有著廣泛的應用。GPS作為精密進場著陸引導系統時必須與INS和無線電高度表相組合。因為GPS易受美國的制約,不宜對其過分依賴。
2)區域定位系統(RPS):區域定位系統(RPS)通過在地面一定區域內放置4~6個在功能上相當于定位衛星的設備(可稱為偽衛星)來實現對空中目標的定位。
3)地面輔助引導設施:通過地面的精密光學系統或者導引雷達對飛機定位,再由上行數據鏈將定位信息傳給飛控計算機。

4)視見引導:利用無人機上光電設備(此時應鎖定在一定的角度上)實時拍攝的機場景象迭加無人機的姿態、航向、空速、高度等信息,形成類似于有人機上的平顯畫面,并結合機場人員對于無人機的目視結果,人工引導飛機進場著陸。
伺服機構
伺服作動設備也稱舵機,是飛控系統的執行部件。其作用在于接收飛行控制指令,進行功率放大,并驅動舵面或發動機節風門偏轉,從而達到控制無人機姿態和軌跡的目的。
伺服作動設備可分為電動伺服作動設備、液壓伺服作動設備和電液混合伺服作動設備。無人機上通常使用電動伺服作動設備。
飛行控制律
飛行控制律是飛行控制系統一個重要組成部分,它是指令及各種外部信息到飛機各執行機構的一種映射關系。飛行控制律的設計就是確定這種映射關系,使飛機在整個飛行包線內具有符合系統要求的飛行品質。飛行控制律設計的依據是系統研制任務合同及相關頂層技術文件。根據這些文件具體形成在具有控制系統下飛機的各種品質或性能,在對無控飛機的特性進行分析的基礎上,為達到所要求的飛行品質或性能,確定初步的控制律結構,然后應用自動控制的設計方法具體確定控制律參數。通過非線性全量仿真、半物理仿真及飛行試驗,驗證或調整控制律結構及參數,使飛行品質或性能達到要求。控制律設計過程是一個迭代回歸的過程。
控制律結構
首先應明確飛機的控制面。一般控制面由升降舵、副翼、方向舵、襟翼、鴨翼、減速板等。根據對無人機的性能要求及無控無人機的特性確定控制律結構。控制律包括縱向控制律和橫航向控制律。根據無人機的任務要求,選擇以下控制律結構。
俯仰角穩定與控制
俯仰角穩定與控制回路一般需要俯仰角及俯仰角速度反饋信號,其一般控制律結構如圖所示。

滾轉角穩定及控制
滾轉角穩定與控制回路一般需要滾轉角及滾轉角速度反饋信號,其一般控制律結構如圖所示。

航向穩定與控制
航向角穩定與控制一般結構如圖。其中,控制結構通過副翼進行航向控制,具有較高的控制效率,但控制中側滑角較大;利用方向舵進行航向控制,該形式的控制效率較低,所引入的滾轉角反饋用于部分消除側滑角;利用副翼和方向舵聯合控制航向角,具有控制效率高及側滑角小的特點。

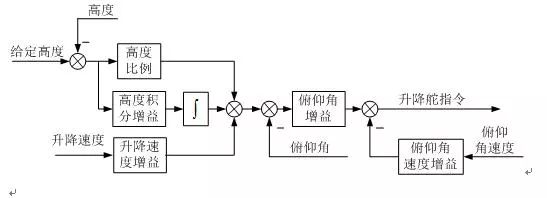
高度控制
高度控制由俯仰內回路及外回路組成。俯仰內回路一般由俯仰角和俯仰角速度反饋組成,高度控制的外回路一般采用比例+積分+微分的形式,如圖所示。
空速控制
空速控制分為節風門空速控制、俯仰空速控制和阻力空速控制。節風門空速控制通過調節發動機節風門實現空速的控制,俯仰空速控制通過升降舵偏轉使飛機攻角變化,從而改變飛機空氣動力實現空速的控制,阻力空速控制通過阻力板的偏轉改變阻力實現空速的控制。
由于發動機一般具有較大的時間延遲,因此節風門空速控制一般相對緩慢,俯仰空速控制和阻力空速控制具有響應相對快的特點。

側向偏離控制
側向偏離控制可實現側向航跡控制。側向偏離控制一般通過飛機的滾轉控制實現,它由滾轉內回路和側偏外回路組成。側偏距離為相對于期望航線的距離,即期望航線與實際航線之差。有差控制一般用于巡航飛行階段,無差控制主要用于精確控制階段,如著陸。


升降速度控制
升降速度控制一般用于自動輪式著陸的拉平階段,其控制結構由俯仰內回路和升降速度外回路組成,如圖所示。

無人機數據鏈技術
數據鏈是無人機系統的主要組成部分之一。設計涉及到遙控遙測、跟蹤定位、圖像傳輸、微波通信、衛星通信、抗干擾通信、天線伺服、自動控制和計算機應用等多個技術領域,是一項復雜的信息系統工程。
數據鏈功能
1、對無人機及機載任務設備的遙控;
2、對無人機及機載設備的遙測;
3、對無人機的跟蹤定位;
4、對無人機偵察信息的實時傳輸與處理。
遙控技術
遙控是無人機數據鏈必備的功能,用于實現對無人機和任務設備的遠距離操作。來自地面操縱臺或操縱器的指令和數據,經編碼、上行(測控站到無人機)無線信道傳輸和解碼,送給機上飛行控制計算機(或直接)對無人機和任務設備實施操作。
在現代先進的無人機系統中,遙控的作用可歸納如下:
1、對無人機飛行的遠距離操縱;
2、對無人機機載設備的遠距離控制;
3、上行測距碼的傳輸;
4、供無人機導航用的數據(包括航路設置或修改數據、測控站位置、由測控站測定的無人機位置、差分GPS修正數據等)的上行傳輸。
遙控對于無人機來說非常重要,其可靠性、抗干擾和抗截獲能力等應充分重視。遙控指令和數據的傳輸一般在較低碼速率下進行,保證足夠的信道電平并不困難。提高設計余度可以增加遙控的可靠性,通過擴頻或跳頻以及數據加密能增加遙控的抗干擾和抗截獲能力。
遙測技術
遙測是了解無人機狀態和對其實施遙控的必要監測手段。來自機上飛行控制計算機或直接來自機上各部分的遙測數據(包括飛行狀態傳感器的數據和機載設備狀態的檢測數據),經編碼、下行(無人機到測控站)無線信道傳輸和解碼,傳回到測控站,通過數據綜合顯示,能夠實時觀察無人機的飛行狀態,以及任務設備的工作狀態。操縱人員借助這些數據可以方便地對無人機及其任務設備進行操縱,完成各種任務。借助下行遙測信道,還可以實現測控站天線對無人機的跟蹤,測出無人機的方位角。通過遙測傳回的測距碼,與發送的測距碼進行比對,能夠完成無人機相對測控站的斜距測量。由方位角和斜距,再利用遙測傳回的高度數據,就能夠確定無人機相對測控站的位置。
在現代先進的無人機系統中,遙測的作用為:
1、下行傳輸無人機的各種飛行狀態數據;
2、下行傳輸無人機的機載設備狀態數據;
3、下行傳輸測距碼,實現對無人機的測距;
4、提供測控站跟蹤測角的信標。
遙測對于無人機來說也是非常重要,數據傳輸的錯誤會給操作人員造成誤導,可能導致誤操作而出現事故。無人機遙測的設計應重視數據的傳輸質量。遙測數據速率可能與遙控數據相近或稍高一些,保證足夠的信道電平也并不困難。通常采取糾錯編碼等措施提高遙測數據的傳輸質量。
跟蹤定位技術
跟蹤定位是指連續和實時地提供無人機的位置數據。這既是操縱無人機的要求,也是對偵察目標進行定位的需要。
對于能自主飛行的無人機,利用遙測將機上導航定位數據實時傳回測控站,就可實現對無人機的跟蹤定位。然而,在有些不能完全依賴機上導航定位的情況下,則需要由測控站對無人機進行測角和測距,確定無人機與測控站的相對位置,再結合測控站本身的位置,就可實現對無人機的跟蹤定位。有時還可以將機上導航定位數據和測控站測量數據融合,這種組合定位方法既增加了余度,又有利于提高定位精度。
對于遠距離飛行的無人機,測控站天線一般采用高增益定向天線。這樣,既有利于增加信號電平,又有利于提高下行信道的抗干擾能力。如果這種高增益定向天線能自動跟蹤無人機,即具有了跟蹤測角能力,那么再結合測距功能就可實現對無人機的跟蹤定位。
由于無人機飛行高度相對較低,無人機對測控站的仰角較小,而且無人機自身大都配備有高度傳感器,故多數情況下無需測定俯仰角,在俯仰方向以手動或數字引導方式完成跟蹤即可,這有利于降低系統的復雜程度。
信息傳輸技術
無人機信息傳輸就是通過下行無線信道向測控站傳送由機載任務傳感器所獲取的視頻偵察信息。視頻偵察信息分圖像偵察和電子偵察兩種信息。圖像偵察信息的信號形式因圖像傳感器類型有所區別,有電視攝像機的模擬或數字電視信號,有成像雷達或行掃式攝像機的圖片數據信號。電子偵察信息則是帶限模擬信號。
信息傳輸是無人機系統完成偵察任務的關鍵。傳輸質量的好壞直接關系到發現和識別目標的能力。偵察信息要求有比遙控和遙測數據高得多的傳輸帶寬(一般要幾兆赫,最高的可達幾十兆赫,甚至上百兆赫)。因此,視頻偵察信息傳輸信道設計往往是無人機無線信道設計最困難的部分。為了簡化系統,視頻信息傳輸和遙測可共用一個信道。
-
傳感器
+關注
關注
2552文章
51341瀏覽量
755537 -
無人機
+關注
關注
230文章
10499瀏覽量
181569 -
信息傳輸
+關注
關注
1文章
42瀏覽量
9356
原文標題:漫談現代無人機及其飛控關鍵技術(軍用類)
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
無人機飛控系統的原理、組成及作用詳解
第四集 知語云智能科技無人機反制技術與應用--無人機的組成與工作原理
無人駕駛直升機地面控制臺關鍵技術研究
限制無人機發展的因素有哪些
無人機飛手緊缺 看無人機行業發展趨勢如何?
無人機類型之植保無人機,帶你了解什么是植保無人機?
【設計技巧】無人機系列之飛控算法
無人機飛控系統
各類反無人機技術的優勢
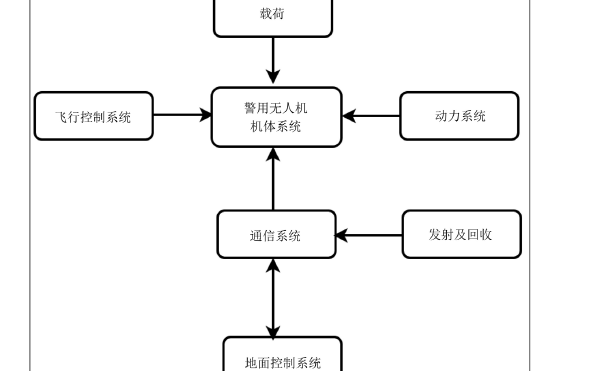
警用無人機關鍵技術及發展趨勢





 工商網監
工商網監
評論