 VL53L1CB TOF開發(2)----多區域掃描模式
VL53L1CB TOF開發(2)----多區域掃描模式
概述
多區域掃描模式是 VL53L1 飛行時間 (Time-of-Flight, ToF) 傳感器的一項高級功能,允許用戶同時對多個區域進行距離測量。該模式通過劃分視場(Field of View, FoV)為多個感興趣區域(Region of Interest, ROI),并對每個區域分別進行測距,為需要廣域監控和多目標檢測的應用提供了理想的解決方案。 在多區域掃描模式下,VL53L1 傳感器可以最多支持 16 個區域的并行測量,用戶還可以根據需求將區域數量擴展到 169 個。每個區域的測量結果會獨立報告,這使得該模式特別適合于需要監測大面積區域或精確跟蹤多個目標的場景,例如投影機梯形校正、多點距離檢測和環境映射等。
該模式支持最多 16 個區域的并行測量,用戶還可以根據需求擴展到 169 個區域。這使得多區域掃描模式成為投影機梯形校正應用的理想選擇,能夠有效應對復雜的角度調整和多點校正需求。
最近在弄ST和瑞薩RA的課程,需要樣片的可以加群申請:615061293 。
視頻教學
[https://www.bilibili.com/video/BV1aJHveYEA3/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源碼下載
[https://download.csdn.net/download/qq_24312945/89703992]
硬件準備
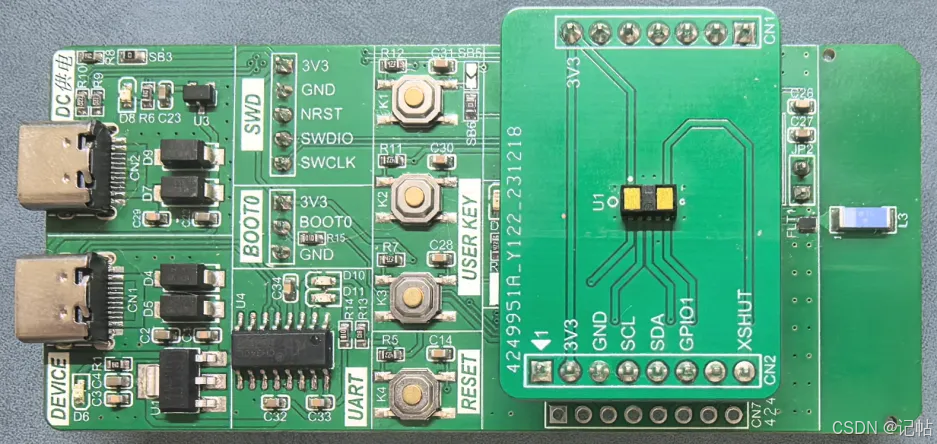
首先需要準備一個開發板,這里我準備的是自己繪制的開發板,需要的可以進行申請。
主控為STM32WB55RGV6,TOF為VL53L1。
主要特點
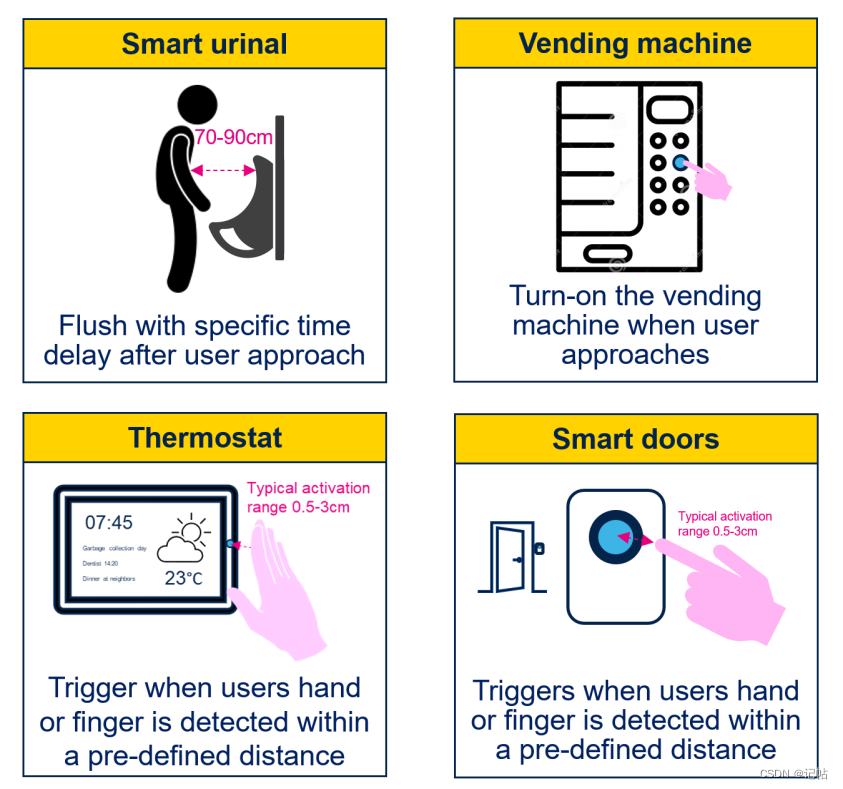
● 多區域檢測:支持對投影圖像的多個區域進行獨立測距,有助于精確的梯形校正。
● 高精度與靈活性:用戶可以根據投影需求自定義 ROI 的數量和大小,實現更精細的圖像調整。
● 應用場景:除了投影機梯形校正,該模式還適用于需要多點距離測量的其他應用,如機器人導航和環境映射。
生成STM32CUBEMX
用STM32CUBEMX生成例程,這里使用MCU為STM32WB55RG。
配置時鐘樹,配置時鐘為32M。

串口配置
查看原理圖,PB6和PB7設置為開發板的串口。
 配置串口。
配置串口。

IIC配置
在這個應用中,VL53L1模塊通過I2C(IIC)接口與主控器通信。具體來說,VL53L1模塊的I2C引腳連接到主控器的PB8和PB9兩個IO口。
配置IIC為快速模式,速度為400k。

XSHUT
XSHUT引腳是由主機連接和控制的,這種設計優化了功耗,因為設備在不使用時可以被完全關閉,然后通過主機使用XSHUT引腳來喚醒。當AVDD存在且XSHUT為低電平時,設備處于硬件待機模式(HW Standby mode)。如果XSHUT引腳不由主機控制,而是通過上拉電阻連接到AVDD,那么設備在固件啟動(FW BOOT)后會自動進入軟件待機(SW STANDBY),而不會進入硬件待機。


GPIO1
在VL53L1X傳感器中,GPIO1(通用輸入輸出引腳1)通常用于中斷信號輸出。

配置如下所示。

X-CUBE-TOF1
本節介紹在不需要使用樣例應用時如何使用STM32CubeMX將X-CUBE-TOF1軟件包添加到項目中。有了這樣的設置,就只配置了驅動層。

堆棧設置

若無法正常運行需要修改優化等級。

函數說明
[https://docs.ros.org/en/melodic/api/vl53l1x/html/group__VL53L1__parameters__group.html]
初始化設置
UM2371文檔是關于使用X-CUBE-53L1A1軟件擴展包在STM32Cube平臺上實現VL53L1X傳感器應用的入門指南。它詳細介紹了如何配置和使用VL53L1X傳感器進行測距,并將測量數據傳輸到PC。

預設模式 (Preset mode)
在 UM2133 文檔的第 3.2.4 節中,描述了 VL53L1 傳感器的預設模式選擇功能。以下是該部分的主要內容:
● 功能: VL53L1_SetPresetMode() 函數用于選擇一個預設的測距模式。使用當前的驅動程序版本,可以選擇以下幾種預設模式:
● VL53L1_PRESETMODE_RANGING: 標準測距模式,用于獲取單個或多個(最多 4 個)目標的測距數據。
● VL53L1_PRESETMODE_MULTIZONES_SCANNING: 多區域掃描模式,允許用戶定義的多個感興趣區域(ROI)進行連續掃描,并逐一報告每個區域的測距值。默認最多支持 16 個區域,最高可擴展到 169 個區域。
● VL53L1_PRESETMODE_LITE_RANGING: 簡化測距模式(已廢棄),最初設計用于降低主機的處理負擔。
● VL53L1_PRESETMODE_AUTONOMOUS: 自主測距模式,在該模式下,傳感器可以定期進行測量,而無需主機干預,適合低功耗應用。
● 默認模式: 默認的預設模式為 VL53L1_PRESETMODE_RANGING。

VL53L1_SetPresetMode
VL53L1_SetPresetMode() 是 VL53L1 傳感器的一個API函數,用于將設備設置為一個新的預設模式(Preset Mode)。該函數定義了傳感器的工作模式,比如高速測距或多目標檢測。
函數描述:
● 作用: 這個函數設置設備的操作模式,比如高速測距或多對象檢測等。它通過修改測量的時間預算和測量間隔來實現不同的模式。
● 注意事項:
○ 這個函數并不會直接訪問設備,而是修改了相關的配置參數。
○ 使用該函數后,時間預算會被設定為 16 ms,測量間隔被設定為 1000 ms,且距離模式被設定為 VL53L1_DISTANCEMODE_LONG。

將 VL53L1 傳感器的預設模式設置為 VL53L1_PRESETMODE_MULTIZONES_SCANNING(多區域掃描模式)。
/*VL53L1_SetPresetMode function is mandatory to be called even if default PresetMode is the VL53L1_PRESETMODE_RANGING */
status = VL53L1_SetPresetMode(&VL53L1CBObj1, VL53L1_PRESETMODE_MULTIZONES_SCANNING);
VL53L1_SetDistanceMode
VL53L1_SetDistanceMode() 是 VL53L1 傳感器的一個API函數,用于設置傳感器的測距模式。該函數允許用戶選擇適合具體應用場景的測距范圍,以優化測量精度。不同的測距模式在不同的距離范圍內提供最佳的測量結果。

根據不同的預設模式(Preset mode),用戶可以選擇適合的距離模式來優化測量的準確性和設備的性能。表格中的內容解釋了每種距離模式的可能選項及其優點或注意事項。

status = VL53L1_SetDistanceMode(&VL53L1CBObj1, VL53L1_DISTANCEMODE_LONG);
時間預算
VL53L1_SetMeasurementTimingBudgetMicroSeconds() 是一個用于設置 VL53L1 傳感器測距時間預算的 API 函數。通過這個函數,用戶可以定義設備在當前模式下(如測距、直方圖模式等)完成一次完整測距序列所允許的最大時間。

VL53L1_ERROR_INVALID_PARAMS: 如果傳入的時間參數不被支持,會返回此錯誤。計算出的時間預算最大值為10秒,最小值則取決于所選擇的預設模式。
時間預算值(表格): 表格中列出了不同預設模式下的時間預算的最小值、典型值和最大值:
● Ranging(測距模式):
○ 最小值: 8毫秒
○ 典型值: 16毫秒
○ 最大值: 500毫秒
● MultiZone scanning(多區域掃描模式):
○ 最小值: 8毫秒
○ 典型值: 16毫秒
○ 最大值: 500毫秒
● Autonomous(自主模式):
○ 最小值: 20毫秒
○ 典型值: 40毫秒
○ 最大值: 1000毫秒

status = VL53L1_SetMeasurementTimingBudgetMicroSeconds(&VL53L1CBObj1, 500000);
單個ROI(Single ROI)設置
● 默認設置: VL53L1傳感器的默認ROI大小是16x16 SPAD(單光子雪崩二極管)矩陣。
● 自定義ROI: 用戶可以調用 VL53L1_SetROI() 函數來設置與默認16x16不同的ROI。ROI是由兩個角點(左上角和右下角)定義的正方形或矩形區域。
● 四個坐標:
● TopLeftX: 左上角X坐標。
● TopLeftY: 左上角Y坐標。
● BotRightX: 右下角X坐標。
● BotRightY: 右下角Y坐標。
● 結構體: 這些坐標是 VL53L1_UserROI_t 類型的結構體的一部分。用戶需要在結構體中定義這些ROI坐標值,然后調用驅動函數應用ROI更改。
● 最小ROI尺寸: 最小的ROI尺寸是4x4 SPAD矩陣。


設置完畢之后使用 VL53L1_StartMeasurement 啟動測量。
VL53L1_MultiRangingData_t MultiRangingData;
VL53L1_MultiRangingData_t *pMultiRangingData = &MultiRangingData;
uint8_t NewDataReady = 0;
uint8_t NumROI = 16, RoiNumber=0, RoiStatus=0;
int no_of_object_found = 0, j, k;
VL53L1_RoiConfig_t pRoiConfig;
pRoiConfig.NumberOfRoi=NumROI;
printf("Start set Roi");
for(k=0;k< 4;k++)
for(j=0;j< 4;j++)
{
pRoiConfig.UserRois[k*4+j].TopLeftX=j*4;
pRoiConfig.UserRois[k*4+j].TopLeftY=k*4+3;
pRoiConfig.UserRois[k*4+j].BotRightX=j*4+3;
pRoiConfig.UserRois[k*4+j].BotRightY=k*4;
printf("set Roi %dnrx: %d-%d y: %d-%dnr",k*4+j,j*4,j*4+3,k*4,k*4+3);
}
/* VL53L1_SetROI must be called after VL53L1_SetPresetMode */
status = VL53L1_SetROI(&VL53L1CBObj1, &pRoiConfig);
if (!status){
status = VL53L1_StartMeasurement(&VL53L1CBObj1);
}
else{
printf("VL53L1_SetROI failed: error =%dnr", status);
while(1){};
};
if(status){
printf("VL53L1_StartMeasurement failed: error = %d nr", status);
while(1);
}
主程序
● 數據檢查:
● VL53L1_GetMeasurementDataReady(&VL53L1CBObj1, &NewDataReady);:這個函數檢查傳感器的測量數據是否準備好。如果有數據可用,NewDataReady 會被設置為非零值。
● HAL_Delay(1);:插入一個1毫秒的延遲,避免在輪詢過程中占用過多的CPU時間。
● 數據獲取:
● 如果測量數據已經準備好,代碼會調用 VL53L1_GetMultiRangingData(&VL53L1CBObj1, pMultiRangingData); 獲取多區域測距數據。
● RoiNumber 和 RoiStatus 從 pMultiRangingData 中提取,表示當前ROI的編號和狀態。
● RangeMilliMeter 是從 pMultiRangingData->RangeData[0] 中提取的測量距離(以毫米為單位)。
● 數據輸出:
● printf 語句將獲取到的數據(ROI編號、狀態、測量距離)輸出到控制臺或串口。
● 數據格式為:RoiNumber, RoiStatus, RangeMilliMeter,每次測量后輸出一行。
● 中斷清除與新測量開始:
● 如果成功獲取到數據并處理完,代碼調用 VL53L1_ClearInterruptAndStartMeasurement(&VL53L1CBObj1); 清除中斷并啟動新的測量。
do{ // polling mode
status = VL53L1_GetMeasurementDataReady(&VL53L1CBObj1, &NewDataReady);
HAL_Delay(1);
if((!status)&&(NewDataReady!=0)){
status = VL53L1_GetMultiRangingData(&VL53L1CBObj1, pMultiRangingData);
RoiNumber=pMultiRangingData- >RoiNumber;
RoiStatus=pMultiRangingData- >RoiStatus;
printf("%1d,", RoiNumber);
printf("%1d,", RoiStatus);
printf("%d", pMultiRangingData- >RangeData[0].RangeMilliMeter);
printf ("nr");
if (status==0){
status = VL53L1_ClearInterruptAndStartMeasurement(&VL53L1CBObj1);
}
}
}
while (1);
數據說明
RoiNumber: 8 位整數,表示與該測量數據相關的ROI編號。
RoiStatus: 當前ROI的狀態,可能的值為 0, 1 或 2,分別表示“無效ROI”、“有效ROI”和“最后一個ROI”。
如果未檢測到目標且測量有效,所有的距離值會被強制設置為最大值,并且其他返回值會設置為默認值(如0或8191)。

測試結果
VL53L1對著天花板測量數據如下所示,2個數據之間相處時間約為500ms。

審核編輯 黃宇
-
傳感器
+關注
關注
2557文章
51930瀏覽量
760044 -
掃描
+關注
關注
0文章
200瀏覽量
24961 -
TOF
+關注
關注
9文章
490瀏覽量
36807
發布評論請先 登錄
相關推薦
VL53L5CX驅動開發(1)----驅動TOF進行區域檢測
VL53L4CD TOF開發(1)----驅動TOF進行測距
VL53L8CX TOF開發(1)----驅動TOF進行區域檢測
VL53L4CD TOF開發(2)----修改測量頻率
VL53L1CB TOF開發(1)----驅動TOF進行測距

新一代ToF 激光測距模塊VL53L0X
VL53L1X簡介
VL53L5CX #高達 8x8 多區域測距和 63°對角線寬視場 飛行時間多區域測距傳感器
RT-Thread VL53L0X TOF傳感器驅動設計資料實現
ST的飛行時間傳感器產品以及哪些傳感器具有哪些功能
VL53L1的門傳感器的功耗有多低?
我可以使用API VL53LX去支持VL53L1CB嗎?
如何區分VL53L1CB和VL53L1CX?
為什么無法在VL53L1上進行測距和多區域掃描?
多區飛行時間(ToF)傳感器的特點






 工商網監
工商網監

評論