

 【基于ELF 1開發(fā)板完成的“智慧光伏”項(xiàng)目】
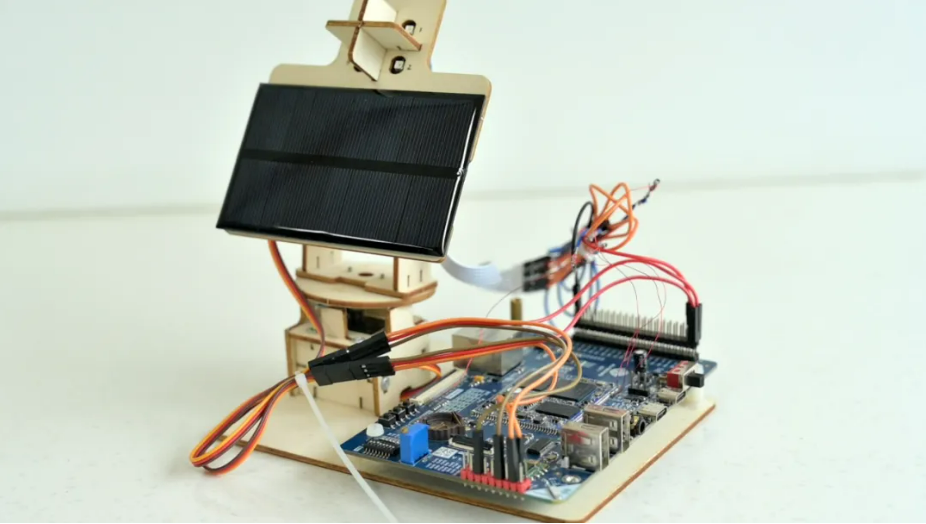
【基于ELF 1開發(fā)板完成的“智慧光伏”項(xiàng)目】“智慧光伏”項(xiàng)目能夠智能追蹤陽(yáng)光的移動(dòng)軌跡。通過(guò)內(nèi)置的光敏傳感器和智能控制系統(tǒng),實(shí)時(shí)感知周圍光源的變化,并驅(qū)動(dòng)太陽(yáng)能板精準(zhǔn)調(diào)整角度,確保每一縷陽(yáng)光都能被最大化地捕捉和利用。下面就和各位小伙伴詳細(xì)介紹一下這一開源項(xiàng)目是怎樣實(shí)現(xiàn)的。
環(huán)境說(shuō)明
1.開發(fā)環(huán)境操作系統(tǒng):Ubuntu18.04 64位版
2.交叉編譯工具鏈:arm-poky-linux-gnueabi-gcc5.3.0
3.開發(fā)板使用Bootloader版本:u-boot-2016.03
4.開發(fā)板內(nèi)核版本:linux-4.1.15
5.開發(fā)板移植QT版本:qt5.6.2
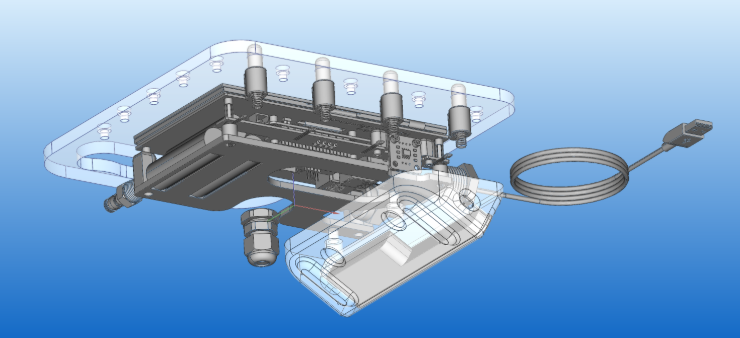
一、 硬件連接
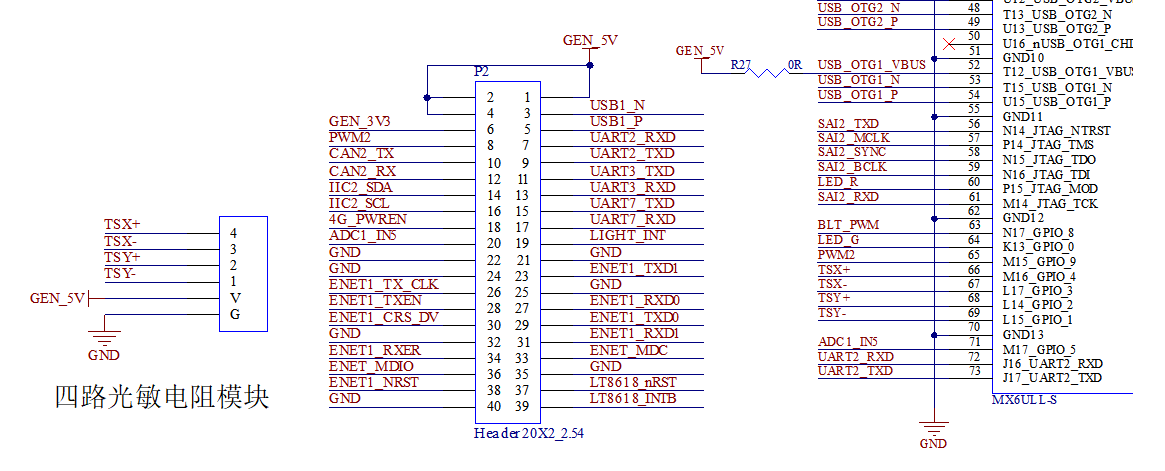
1、四路光敏傳感器與板卡的連接
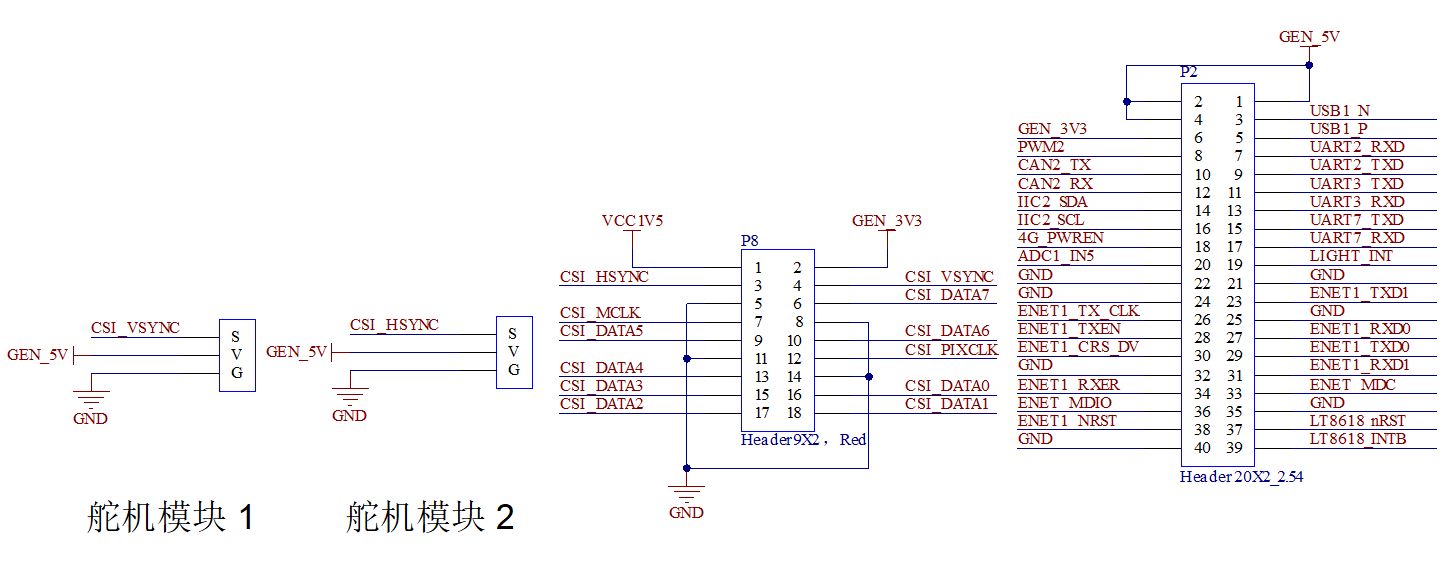
2、舵機(jī)與板卡的連接
二、內(nèi)核適配
1、實(shí)現(xiàn)舵機(jī)轉(zhuǎn)動(dòng)的功能
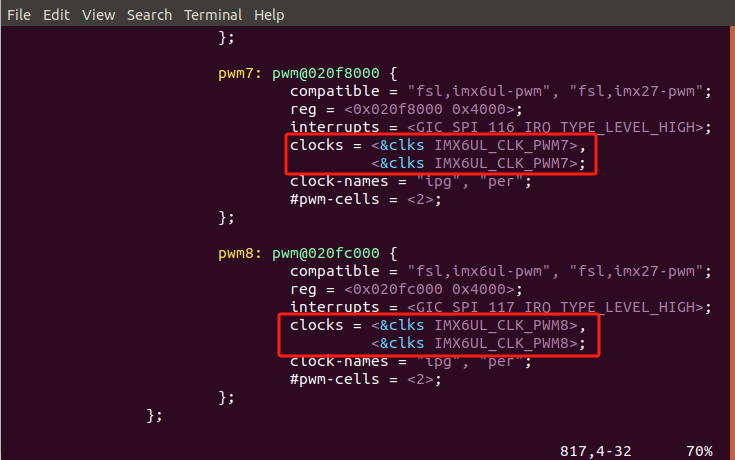
MG90S舵機(jī)采用pwm的方式來(lái)控制,該項(xiàng)目需要用到兩個(gè)舵機(jī),所以需要在設(shè)備樹中進(jìn)行pwm7、pwm8的復(fù)用。
(1)拷貝ELF1開發(fā)板資料包\02-Linux 源代碼\02-0 出廠內(nèi)核和uboot源碼\內(nèi)核源碼\linux-4.1.15-elf1.tar.bz2
內(nèi)核源碼到開發(fā)環(huán)境/home/elf/work/目錄下解壓
elf@ubuntu:~/work$ tar -xvf linux-4.1.15-elf1.tar.bz2
(2)修改頂層設(shè)備樹文件arch/arm/boot/dts/imx6ull.dtsi
elf@ubuntu:~/work$ cd linux-4.1.15-elf1/ elf@ubuntu:~/work/linux-4.1.15-elf1$ vi arch/arm/boot/dts/imx6ull.dtsi
(3)修改設(shè)備樹文件arch/arm/boot/dts/imx6ull-elf1-emmc.dts
elf@ubuntu:~/work/linux-4.1.15-elf1$ vi arch/arm/boot/dts/imx6ull-elf1-emmc.dts
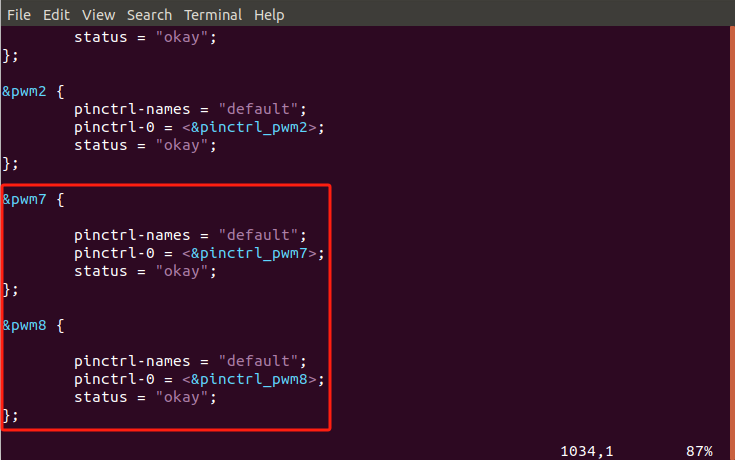
添加pwm7、pwm8設(shè)備節(jié)點(diǎn)
&pwm7 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_pwm7>; status = "okay"; }; &pwm8 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_pwm8>; status = "okay"; };
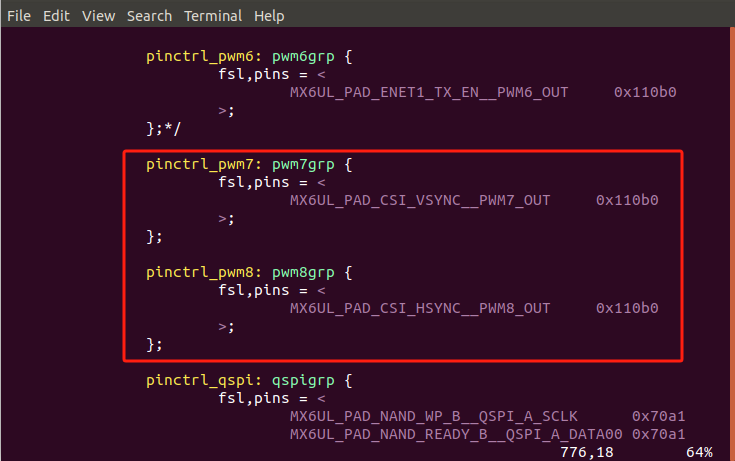
在iomux節(jié)點(diǎn)下面添加pwm7、pwm8引腳復(fù)用
pinctrl_pwm7: pwm7grp { fsl,pins = < MX6UL_PAD_CSI_VSYNC__PWM7_OUT 0x110b0 >; }; pinctrl_pwm8: pwm8grp { fsl,pins = < MX6UL_PAD_CSI_HSYNC__PWM8_OUT 0x110b0 >; };
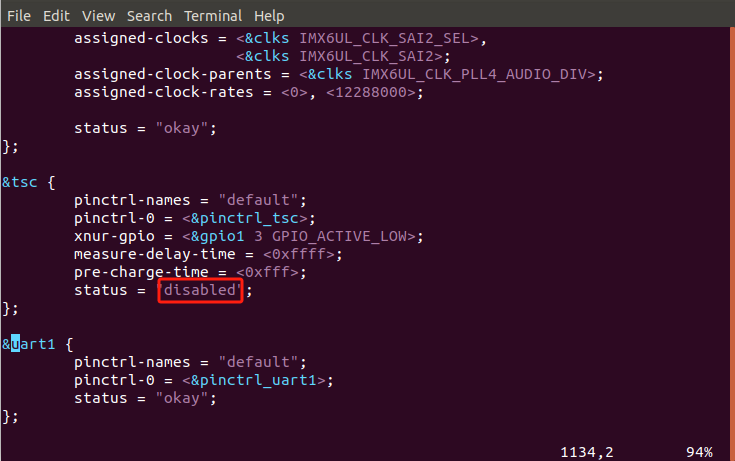
取消其它用到csi功能的地方
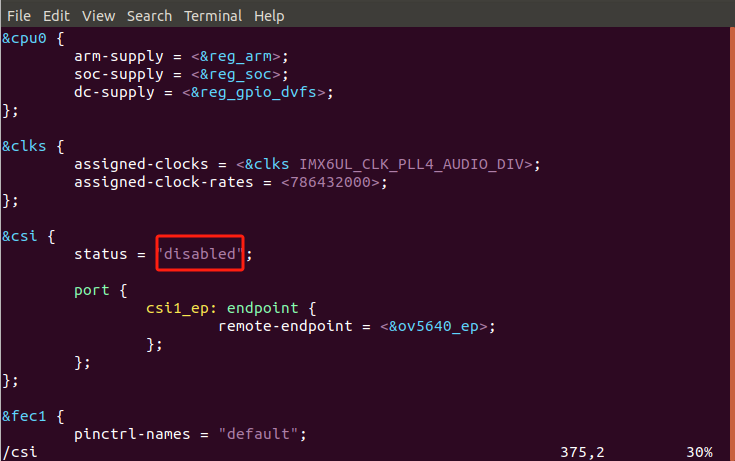
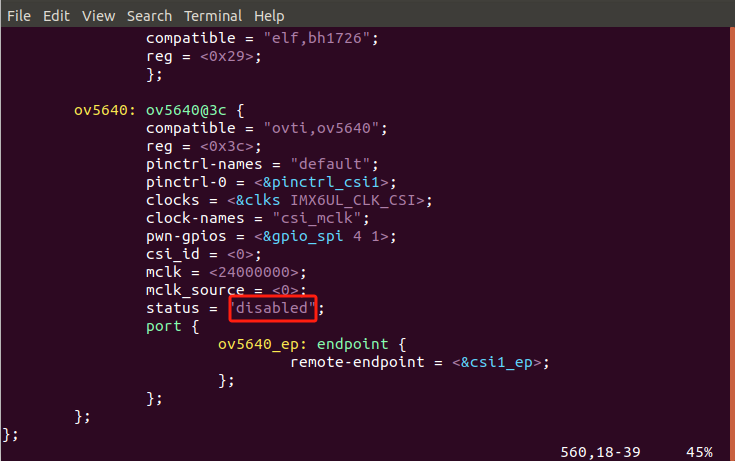
至此pwm7、pwm8已經(jīng)復(fù)用完成
2、實(shí)現(xiàn)獲取光照值的功能
四路光敏傳感器需要四路adc,需要在設(shè)備樹中進(jìn)行adc1、adc2、adc3、adc4的復(fù)用
(1)修改設(shè)備樹文件arch/arm/boot/dts/imx6ull-elf1-emmc.dts
elf@ubuntu:~/work$ cd linux-4.1.15-elf1/ elf@ubuntu:~/work/linux-4.1.15-elf1$ vi arch/arm/boot/dts/imx6ull-elf1-emmc.dts
在iomux節(jié)點(diǎn)下面添加adc1、adc2、adc3、adc4引腳復(fù)用
pinctrl_adc1: adc1grp { fsl,pins = < MX6UL_PAD_GPIO1_IO05__GPIO1_IO05 0x00b0 MX6UL_PAD_GPIO1_IO01__GPIO1_IO01 0x00b0 MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0x00b0 MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x00b0 MX6UL_PAD_GPIO1_IO04__GPIO1_IO04 0x00b0 >; };
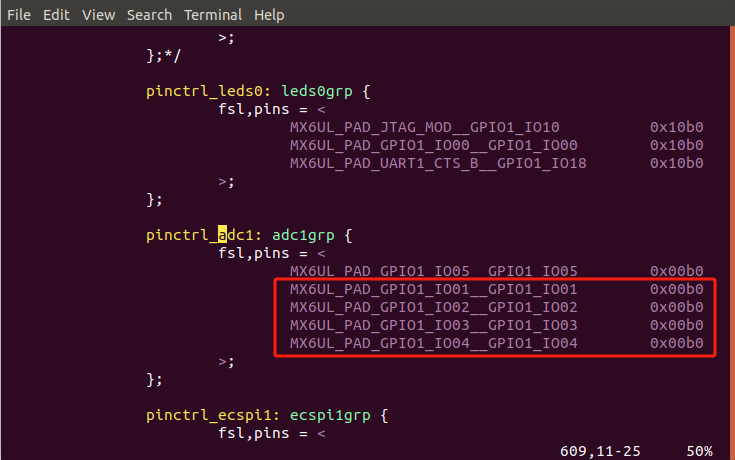
注釋掉其它用到GPIO1_IO01、GPIO1_IO02、GPIO1_IO03、GPIO1_IO04功能的地方
至此adc已經(jīng)復(fù)用完成
3、編譯并替換設(shè)備樹
(1)執(zhí)行環(huán)境變量
elf@ubuntu:~/work/linux-4.1.15-elf1$ . /opt/fsl-imx-x11/4.1.15-2.0.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
(2)編譯設(shè)備樹
elf@ubuntu:~/work/linux-4.1.15-elf1$ make imx6ull_elf1_defconfig elf@ubuntu:~/work/linux-4.1.15-elf1$ make dtbs
(3)將arch/arm/boot/dts/路徑下的imx6ull-elf1-emmc.dtb放到U盤,通過(guò)U盤拷貝到開發(fā)板
root@ELF1:~# cp /run/media/sda1/imx6ull-elf1-emmc.dtb /run/media/mmcblk1p1/
(4)保存并重啟開發(fā)板
root@ELF1:~# sync root@ELF1:~# reboot
三、數(shù)據(jù)采集和設(shè)備控制
1、程序設(shè)計(jì)
主函數(shù)的實(shí)現(xiàn)main.cpp
int main() { int up = 0; int down = 0; int left = 0; int right = 0; int duty_cycle6 = DUTY_90_DEG; int duty_cycle7 = DUTY_90_DEG; int adcChannels[] = {1, 2, 3, 4}; int adcValues[4] = {0}; init_pwm(); write_file(PWM6_DUTY_CYCLE, duty_cycle6); write_file(PWM7_DUTY_CYCLE, duty_cycle7); while (1) { for (int i = 0; i < 4; ++i) { adcValues[i] = read_adc_value(adcChannels[i]); } up = (adcValues[3] + adcValues[0]) ; down = (adcValues[2] + adcValues[1]) ; left = (adcValues[3] + adcValues[2]) ; right = (adcValues[0] + adcValues[1]) ; printf("up: %d\n", up); printf("down: %d\n", down); printf("left: %d\n", left); printf("right: %d\n", right); if ((down - up >= 200) && (duty_cycle6 >= DUTY_0_DEG)) { duty_cycle6 -= 100000; write_file(PWM6_DUTY_CYCLE, duty_cycle6); usleep(10000); } if ((up - down >= 200) && (duty_cycle6 <= DUTY_180_DEG)) { duty_cycle6 += 100000; write_file(PWM6_DUTY_CYCLE, duty_cycle6); usleep(10000); } if ((right - left >= 200) && (duty_cycle7 >= DUTY_0_DEG)) { duty_cycle7 -= 100000; write_file(PWM7_DUTY_CYCLE, duty_cycle7); usleep(10000); } if ((left - right >= 200) && (duty_cycle7 <= DUTY_180_DEG)) { duty_cycle7 += 100000; write_file(PWM7_DUTY_CYCLE, duty_cycle7); usleep(10000); } usleep(100000); } return 0; }
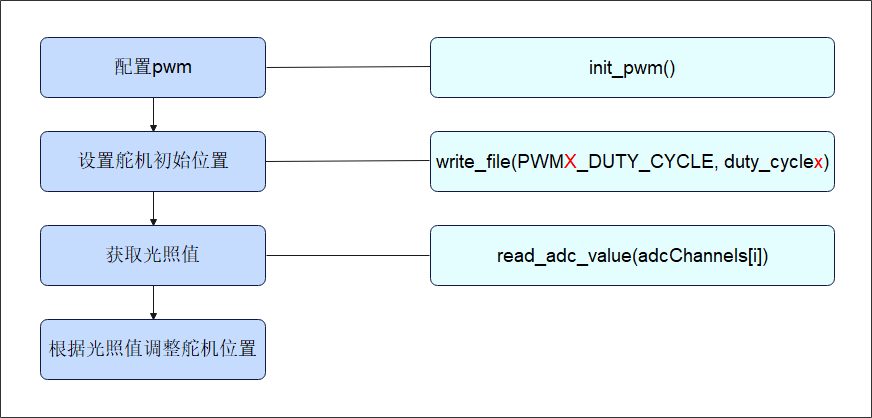
配置pwm
int init_pwm() { write_file(PWM6_EXPORT, 0); if (-1 == write_file(PWM6_PERIOD, PWM_PERIOD)) return -1; if (-1 == write_file(PWM6_ENABLE, 1)) return -1; write_file(PWM7_EXPORT, 0); if (-1 == write_file(PWM7_PERIOD, PWM_PERIOD)) return -1; if (-1 == write_file(PWM7_ENABLE, 1)) return -1; return 0; }
設(shè)置舵機(jī)初始位置
write_file(PWM6_DUTY_CYCLE, duty_cycle6); write_file(PWM7_DUTY_CYCLE, duty_cycle7);
獲取光照值
int read_adc_value(int adcNumber) { int adcValue = 0 ; FILE* adcFile; char adcValueFile[50]; char adcValueStr[10] = "0"; snprintf(adcValueFile, sizeof(adcValueFile), "/sys/bus/iio/devices/iio:device0/in_voltage%d_raw", adcNumber); adcFile = fopen(adcValueFile, "r"); if (adcFile) { fgets(adcValueStr, sizeof(adcValueStr), adcFile); adcValue = atoi(adcValueStr); fclose(adcFile); } else { fprintf(stderr, "Error opening ADC value file %s.\n", adcValueFile); } return adcValue; }
根據(jù)光照值調(diào)整舵機(jī)位置
if ((down - up >= 200) && (duty_cycle6 >= DUTY_0_DEG)) { duty_cycle6 -= 100000; write_file(PWM6_DUTY_CYCLE, duty_cycle6); usleep(10000); } if ((up - down >= 200) && (duty_cycle6 <= DUTY_180_DEG)) { duty_cycle6 += 100000; write_file(PWM6_DUTY_CYCLE, duty_cycle6); usleep(10000); } if ((right - left >= 200) && (duty_cycle7 >= DUTY_0_DEG)) { duty_cycle7 -= 100000; write_file(PWM7_DUTY_CYCLE, duty_cycle7); usleep(10000); } if ((left - right >= 200) && (duty_cycle7 <= DUTY_180_DEG)) { duty_cycle7 += 100000; write_file(PWM7_DUTY_CYCLE, duty_cycle7); usleep(10000); }
2、應(yīng)用編譯
(1)拷貝sun.tar.bz2到開發(fā)環(huán)境/home/elf/work目錄下解壓
elf@ubuntu:~/work$ tar xvf sun.tar.bz2
(2)執(zhí)行環(huán)境變量
elf@ubuntu:~/work$ . /opt/fsl-imx-x11/4.1.15-2.0.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
(3)編譯
elf@ubuntu:~/work$ cd sun/ elf@ubuntu:~/work/sun$ make
(4)拷貝sanapp到開發(fā)板/home/root路徑下
root@ELF1:~# cp /run/media/sda1/sunapp ./ root@ELF1:~# sync
四、項(xiàng)目測(cè)試
1、確保開發(fā)板已正確連接四路光敏傳感器和舵機(jī)
2、執(zhí)行應(yīng)用
root@ELF1:~# ./sunapp
此時(shí)可以打開手電筒模擬太陽(yáng)光,調(diào)整太陽(yáng)能板的角度
對(duì)于初涉嵌入式開發(fā)領(lǐng)域的小伙伴來(lái)說(shuō),“智慧光伏”無(wú)疑是一個(gè)兼具趣味與實(shí)踐的開源項(xiàng)目。通過(guò)親身參與這一開源項(xiàng)目的組裝與調(diào)試過(guò)程,可以直接接觸到真實(shí)的開發(fā)環(huán)境、工具鏈和代碼庫(kù),從而解決實(shí)際問(wèn)題,幫助初學(xué)者更快地成長(zhǎng)為合格的嵌入式開發(fā)工程師
-
單片機(jī)
+關(guān)注
關(guān)注
6052文章
44748瀏覽量
642539 -
嵌入式
+關(guān)注
關(guān)注
5113文章
19337瀏覽量
311257 -
開發(fā)板
+關(guān)注
關(guān)注
25文章
5263瀏覽量
99765 -
Linux開發(fā)
+關(guān)注
關(guān)注
0文章
34瀏覽量
7093 -
開源代碼
+關(guān)注
關(guān)注
0文章
36瀏覽量
3096
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Open Echo:一個(gè)開源的聲納項(xiàng)目
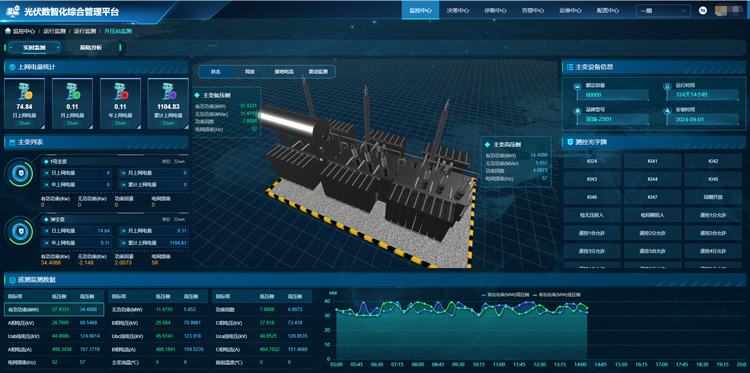
智慧光伏運(yùn)維管理系統(tǒng)
ElfBoard開源項(xiàng)目|智能消防車項(xiàng)目

智慧光伏運(yùn)維管理系統(tǒng)助力光伏運(yùn)維降本增效
開源鴻蒙榮獲開放原子“2024年度操作系統(tǒng)領(lǐng)域國(guó)內(nèi)活躍開源項(xiàng)目”
ElfBoard開源項(xiàng)目|車牌識(shí)別項(xiàng)目技術(shù)文檔
無(wú)人機(jī)AI智慧光伏巡檢系統(tǒng)的技術(shù)實(shí)現(xiàn)與運(yùn)維革新
凌蒙派OpenHarmony開源項(xiàng)目榮獲本期Gitee官方推薦

真格基金宣布捐贈(zèng)開源AI項(xiàng)目vLLM
ElfBoard開源項(xiàng)目|“智慧教室”開源項(xiàng)目技術(shù)文檔

Matepad pro12.2 已上市半個(gè)月,但是還沒有在開源網(wǎng)站看到該項(xiàng)目的開源信息,違背開源精神
智慧光伏運(yùn)維管理系統(tǒng)引領(lǐng)光伏電站管理新時(shí)代

嵌入式學(xué)習(xí)-飛凌嵌入式ElfBoard-項(xiàng)目分享|基于ELF 1S開發(fā)板完成的物聯(lián)網(wǎng)開源項(xiàng)目
飛凌嵌入式-ElfBoard-項(xiàng)目分享|基于ELF 1S開發(fā)板完成的物聯(lián)網(wǎng)開源項(xiàng)目
項(xiàng)目分享|基于ELF 1S開發(fā)板完成的物聯(lián)網(wǎng)開源項(xiàng)目






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論