 機器人仿真的類型和優勢
機器人仿真的類型和優勢
機器人仿真使機器人工程師和研究人員能夠創建機器人及其環境的虛擬模型。這項技術支持在仿真的無風險環境中測試和驗證機器人設計與控制算法以及與各種元素進行交互。通過使用仿真軟件,可以預測和分析機器人在各種條件下的行為,而不需要物理原型。構建物理原型不僅成本高昂,而且相當耗時。
機器人仿真的工作原理
機器人仿真不僅有助于節省時間和資源,而且提供了一個安全的環境,讓您在物理系統建立之前就能測試和改進機器人算法和系統。
機器人仿真的類型
機器人仿真可以分為若干種類型,每種類型在機器人系統的開發和測試中都服務于特定用途:
多域動態仿真基于力和扭矩等物理特性,用于在真實條件下測試控制系統,以設計與其環境進行物理交互的機器人。使用基于物理的多域建模工具,您可以執行多體動態仿真,并微調機械組件、作動器和控制策略,以確保實現有效且高效的操作。
運動學運動仿真用于可視化機器人的運動,確保路徑無碰撞且高效。它們對于規劃和驗證機器人軌跡以設計自主系統應用至關重要。在這種仿真中,您可以對機器人的 AI 和決策能力進行建模,仿真它們如何感知和響應虛擬環境,這對于自主操作來說是必不可少的。
高級任務仿真用于評估機器人執行復雜任務的能力,幫助驗證機器人在特定場景下操作的有效性。高級任務仿真利用了游戲引擎的高級物理和渲染功能,并結合了傳感器和場景仿真,用于仿真機器人在復雜動態環境中的輸入和輸出。
硬件在環 (HIL) 仿真將包括可編程邏輯控制器 (PLC) 在內的真實硬件組件納入仿真中,支持實時測試和驗證工業控制系統。HIL 仿真便于執行高度精確且高效的測試過程。這種方法至關重要,它使您能夠在物理部署之前識別潛在問題、優化系統性能和確保可靠性。
上述仿真共同構成了一款全面的工具,用于開發、測試和改進機器人,以確保它們為實際部署做好準備。
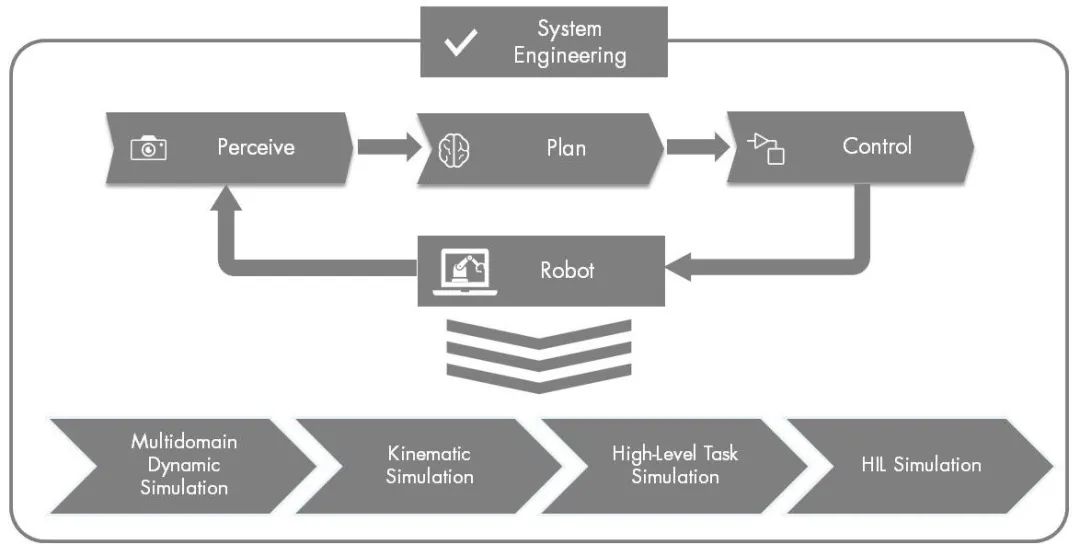
機器人仿真的類型。
常見的機器人仿真軟件
仿真極大地方便了機器人系統的驗證和確認,并提供了一種自動執行、經濟高效且可擴展的方案,以取代勞動密集型的高成本現場測試過程。機器人仿真軟件具有廣闊的前景,可提供滿足機器人社區各種需求的定制工具:
Gazebo Sim 提供了物理建模功能和各種傳感器,是關注復雜場景和室外環境的研究人員的首選工具。
CoppeliaSim 以靈活的腳本編寫和一套內置函數而聞名,既適用于仿真簡單的機器人系統,也適用于仿真復雜的機器人系統。
Webots 提供了一個移動機器人建模、編程和仿真平臺,因其易用性和跨平臺支持而在教學和研究領域廣受歡迎。
RoboDK 專為工業機器人應用而設計,它提供了一種用于制造業機械臂的仿真和編程方法。
MuJoCo 是一款物理引擎,旨在仿真和控制機器人、生物機械系統及其他與系統之間存在復雜交互和接觸情況的動態對象。
Unity 和 Unreal Engine 已從游戲開發擴展到機器人領域,提供高保真的可視化和物理效果,這對于機器人領域的 VR 和 AR 應用尤為有益。
NVIDIA Isaac Sim 是一個仿真平臺,它利用了高級圖形和 AI 技術,使得在高度逼真的虛擬環境中開發、測試和訓練機器人與 AI 算法成為可能。
MATLAB 和 Simulink 以其強大的計算能力而聞名,可用于對機器人進行詳細建模和仿真,以執行算法開發、測試和系統分析。它們還可以作為集成平臺,支持與其他仿真器(包括上述工具)進行協同仿真。
上述每個仿真器都服務于機器人仿真的不同方面,從機器人操作臂到海用機器人,從學術研究到工業自動化和虛擬現實集成。
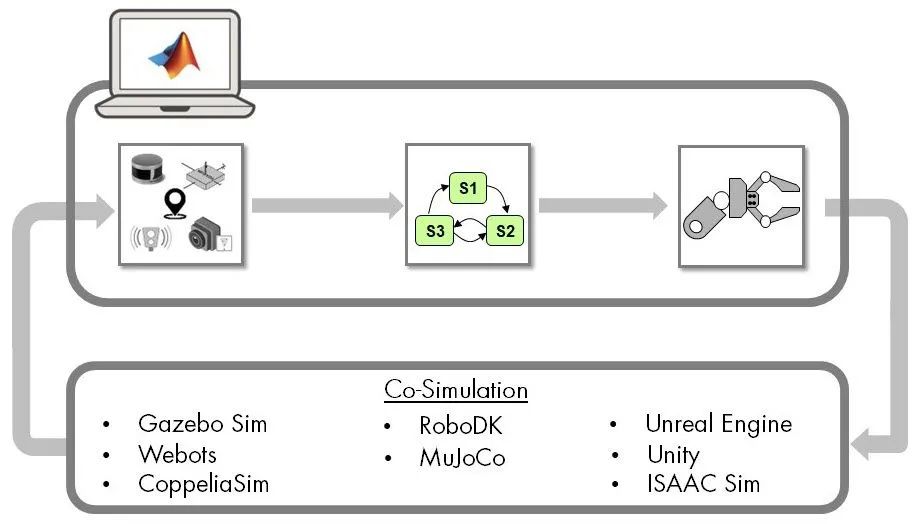
使用 MATLAB 和 Simulink 與機器人仿真器和游戲引擎進行協同仿真,以實現傳感器和場景仿真。
為什么機器人仿真如此重要
機器人仿真是推進機器人系統開發和部署的關鍵,為系統和環境建模提供了極大的便利。它們有助于在虛擬空間中對機器人的機械結構、電子系統和軟件執行詳細的設計和分析,使開發人員可以在不帶來現實風險的情況下識別設計缺陷并優化性能。仿真包括:
系統建模。仿真用于創建和分析機器人系統的設計,有助于理解在虛擬環境中進行系統建模時的組件交互。這可以優化系統性能,確保產品功能符合預期。
環境建模。環境建模可對機器人操作時所處的物理世界進行仿真,通過各種設置測試導航和任務執行。這種安全、高效的方法可以在各種條件下測試機器人,而不需要真實世界的測試成本。
虛擬調試。它在虛擬環境中驗證機器人的控制策略和系統集成,從而減少停機時間,提高系統運行時的效率。
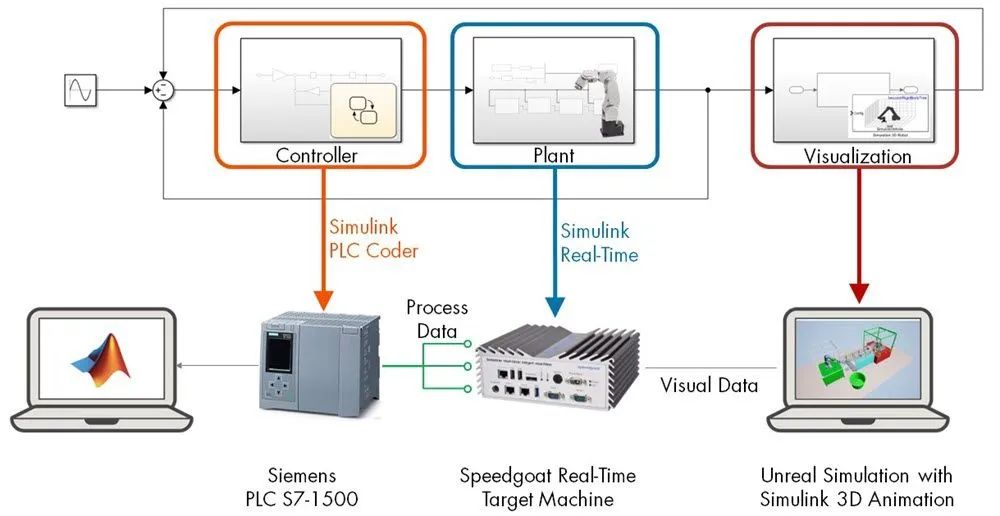
工業機器人的虛擬調試設置,包括 PLC 機器、實時目標和可視化。
機器人仿真對于優化機器人并使其適應真實工作條件是不可或缺的。它能夠確保安全性,最大限度地減少物理原型以降低成本,并支持快速迭代來加速開發過程。
機器人仿真的主要優勢
確保安全和降低風險:通過在虛擬環境中進行測試來防止潛在危險。
成本效率:通過使用虛擬測試節省材料和減少試驗。
快速原型構建和測試:支持快速評估和迭代。
算法開發和驗證:為微調算法提供可控環境。
設計優化:有助于在工業環境中配置高效的生產布局。
環境測試:評估不同條件下的機器人,以確認操作能力。
隨著機器人技術日趨復雜,機器人仿真的應用也日益廣泛。這種仿真提供了一種安全、經濟、高效的開發方法,確保機器人為部署做好充分準備。
機器人仿真的功能和面臨的挑戰
機器人仿真具有多項關鍵功能,有助于增強它在機器人領域中的實用性和有效性。這些功能旨在確保仿真盡可能逼真和有用,涵蓋從基于物理的建模到逼真環境的廣泛范圍。然而,盡管機器人仿真取得了這些進步,但開發人員仍面臨著許多挑戰。這些挑戰可能會阻礙機器人仿真的有效應用。
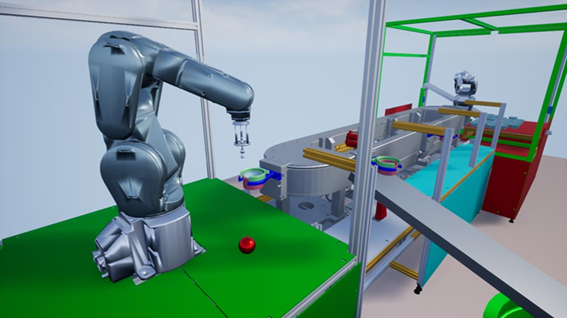
通過 Simulink 3D Animation 虛幻引擎接口,實現具有兩個機器人工作單元的虛擬裝配線的自動化。
機器人仿真的關鍵功能
基于物理。仿真基于物理特性,可以確保實現逼真的機器人行為,從而模擬真實的物理交互。
傳感器模型。機器人仿真對于機器人環境交互至關重要,它提供了仿真各種傳感器輸入的功能,使開發人員能夠測試機器人將如何感知其周圍環境。
圖像真實化。高級仿真提供逼真的圖像環境,這對精確的視覺數據處理和決策算法至關重要。
連接性。仿真可與其他軟件工具和系統相連,以實現全面的多系統集成。此功能對于無縫集成機器人操作系統 (ROS)尤為重要。
多域仿真。通過仿真各種環境,包括電氣和機械系統,可以仿真復雜條件下的機器人。
速度。高效的設計可實現復雜機器人場景的快速迭代和測試。
用戶界面 (UI)。直觀的 UI 至關重要,它有助于用戶輕松導航仿真軟件、管理設置以及可視化操作和交互。
虛幻引擎中的箱內取物協作機器人仿真。
機器人仿真面臨的挑戰
雖然機器人仿真提供了許多好處,但開發人員也遇到了若干挑戰,這些挑戰可能會限制其有效性:
可擴展性和復雜性。在不降低性能的情況下擴展復雜系統的仿真充滿挑戰。
真實感和保真度。在仿真物理交互和機器人行為時實現高度真實感需要復雜的模型。
計算需求。高級仿真需要大量的計算資源,這會限制速度和可訪問性。
傳感器噪聲和不確定性建模。精確復制機器人傳感器中的固有噪聲和不確定性相當困難,但這是開發穩健的感知算法的必要條件。
場景和環境搭建。針對測試設計各種逼真的場景和環境非常耗時,而且通常需要專業知識。
通過持續集成進行集成。將仿真納入持續集成管道具有一定難度,這要求仿真成為開發周期的一部分。
無論是對于開發過程的各個階段,還是對于從數字原型構建到運維的整個產品生命周期,機器人仿真都至關重要。這種仿真提供了一個虛擬環境,用于在構建和部署系統之前對其進行測試和優化,以便可以及早檢測設計缺陷和驗證系統性能。因此,必須克服上述挑戰,才能充分發揮仿真在機器人開發中的潛能。
使用 MATLAB 進行機器人仿真
使用 MATLAB 進行機器人仿真需要一種以基于模型的設計為中心的綜合方法。此設計流程可用于創建機器人系統的數字孿生。通過基于模型的設計,MATLAB 有助于盡早識別潛在挑戰,優化系統功能,并確保機器人在真實場景中的表現符合預期,從而簡化開發過程。以下是如何使用 MATLAB 進行機器人仿真的細分階段:
創建數字孿生。首先,使用 Simscape 和 Robotics System Toolbox 在 MATLAB 中為您的機器人系統建模,以創建一個數字孿生。這種數字表示是仿真的核心,支持詳細的分析和驗證。
多域仿真。使用 MATLAB 和 Simscape 在單一環境中對各種域進行仿真。此步驟包括物理建模和動態仿真,使您能夠在統一空間中測試機器人功能的不同方面。
機器人自主性設計。使用 Robotics System Toolbox,您可以仿真和測試機器人的自主性,探索它如何響應各種場景和環境,而無需物理原型。
自動化測試。MATLAB 支持采用基于模型的設計執行自動化測試,使您能夠根據系統需求高效地驗證您的機器人。這種方法可以確保機器人的每個組件都符合必要的標準。
逼真的仿真。通過將 MATLAB 和 Simulink 3D Animation 與虛幻引擎的逼真仿真功能相結合,可以提供一個強大的平臺,用于在高度逼真和復雜的虛擬環境中訓練 AI 模型,以便能夠在接近模擬真實條件的場景中開發、測試和優化復雜的算法,從而提高 AI 系統在各種應用中的效率和可靠性。
代碼生成。數字孿生也可以作為代碼生成的基礎。此功能有利于早期和持續的測試和驗證,并簡化從仿真過渡到現實部署的過程。
集成和協同仿真。Simulink 可作為強大的集成平臺。您可以納入使用 C/C++ 或 Python 編寫的內部代碼,并在 Simulink 環境中使用第三方軟件和仿真器。ROS Toolbox 對于使用各種仿真器和硬件執行的協同仿真特別有用,可以增強機器人仿真的真實感和深度。
使用 MATLAB,您可以有效地仿真機器人,涵蓋從其物理動力學到其自主行為的整個范圍。這種方法不僅可以加速開發過程,而且能夠提高最終機器人系統的可靠性和性能。
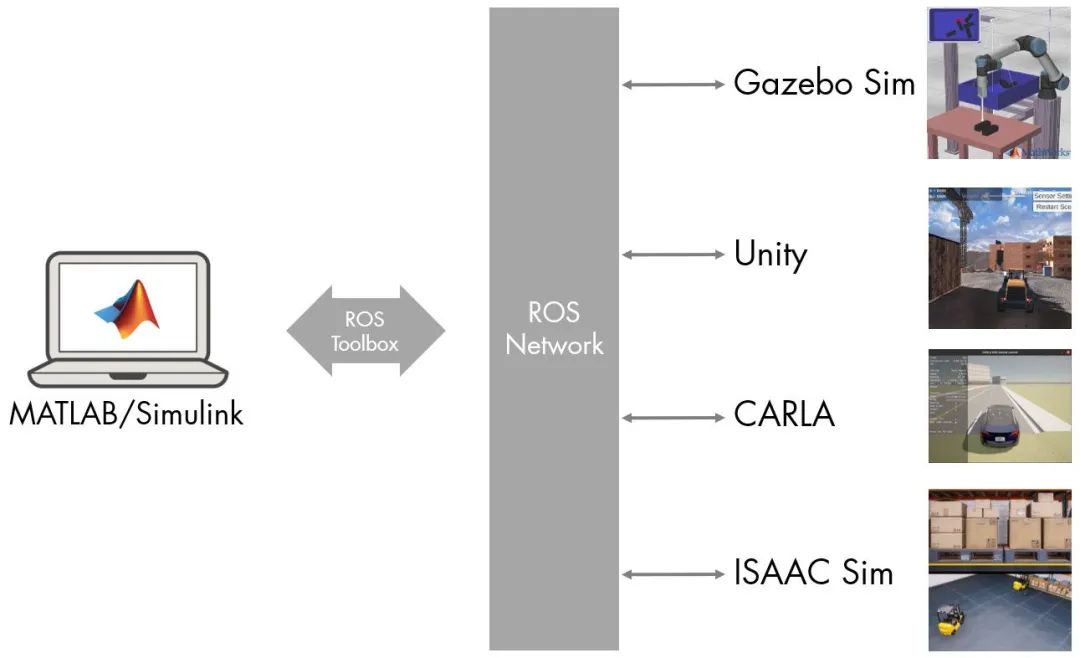
ROS 用于 MATLAB 和 Simulink 與各種外部仿真器的協同仿真。
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753076 -
機器人
+關注
關注
211文章
28380瀏覽量
206916 -
仿真
+關注
關注
50文章
4070瀏覽量
133552 -
仿真軟件
+關注
關注
21文章
243瀏覽量
30359
原文標題:四大須知 | 什么是機器人仿真?
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論