


基于MEMS姿態(tài)傳感器主要用于載體姿態(tài)的調(diào)整和傾角的檢測,但是由于工作環(huán)境溫度的改變,就會導(dǎo)致測量精度的變化,在一些高精度檢測的要求下,則失去其檢測的效果,所以必須采取相應(yīng)措施來消除或者減少隨溫度變化而引起的誤差,即必須對傳感器進(jìn)行溫度補(bǔ)償。
隨著微機(jī)電系統(tǒng)(MEMS)技術(shù)在微型化技術(shù)基礎(chǔ)上,結(jié)合了電子、機(jī)械、材料等多種學(xué)科交叉融合的前沿科研領(lǐng)域的不斷發(fā)展與成熟,從而出現(xiàn)了很多基于MEMS技術(shù)的傳感器,此類傳感器具有體積小、重量輕、低功耗、多功能等優(yōu)點(diǎn),在電子產(chǎn)品、航空航天、機(jī)械化工等行業(yè)中得到了廣泛應(yīng)用。
傳感器的溫度補(bǔ)償方法大致可以分為兩種,即硬件補(bǔ)償和軟件補(bǔ)償。硬件補(bǔ)償方法主要是改變電路來達(dá)到補(bǔ)償效果,但是這種方法會導(dǎo)致電路的復(fù)雜化,同時提高了成本。軟件補(bǔ)償方法主要有最小二乘法、BP 神經(jīng)網(wǎng)絡(luò)法、回歸法等。從計(jì)算的方便性和補(bǔ)償精度的準(zhǔn)確性兩個方面,本文采取最小二乘法進(jìn)行溫度補(bǔ)償。
1 姿態(tài)傳感器的溫度補(bǔ)償原理
本文采用美國InvenSense 公司生產(chǎn)的ITG?3205 三軸陀螺儀芯片,該芯片中內(nèi)嵌有數(shù)字輸出溫度傳感器,因此可以隨時檢測出傳感器所處的環(huán)境溫度。在不同的工作環(huán)境溫度下,傳感器實(shí)際角度輸出值與理論角度輸出值會出現(xiàn)一定的誤差,稱之為溫度誤差。為了消除或者減少這種溫度誤差,利用最小二乘法進(jìn)行曲線擬合,最終達(dá)到或接近理論角度輸出值。
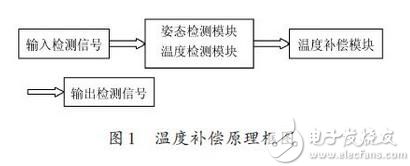
傳感器根據(jù)輸入的檢測信號,通過姿態(tài)檢測模塊和溫度檢測模塊采集相關(guān)數(shù)據(jù),然后經(jīng)過溫度補(bǔ)償模塊進(jìn)行相應(yīng)的溫度補(bǔ)償,最后通過輸出檢測模塊可得到預(yù)期的檢測信號。姿態(tài)傳感器的溫度補(bǔ)償原理如框圖1所示。
2 姿態(tài)傳感器的溫度補(bǔ)償方法
在同一溫度下,不同角度的理論值與輸出值之間嚴(yán)格意義上是一種非線性關(guān)系,但是由于這種誤差值相對不大,可以近似的認(rèn)為是一種線性關(guān)系,即y = mx + n 的線性關(guān)系。通過最小二乘法進(jìn)行線性擬合,可以得出參數(shù)m 和n 的值。
此時可以發(fā)現(xiàn),在不同的溫度下,所擬合出來的m和n 值是隨溫度的變化而變化的。在此情況下,必須找出溫度分別與m 和n 之間的關(guān)系,為此同樣可以根據(jù)最小二乘法再次進(jìn)行曲線擬合,從而得出m 值與溫度之間的關(guān)系。同理也可以得出n 與溫度之間的關(guān)系。經(jīng)過兩次曲線擬合之后,可以得出理論值與輸出值之間的誤差有了明顯的減小,并且滿足預(yù)期的要求。在實(shí)際應(yīng)用中,為了達(dá)到高精度檢測的要求,可以通過測量多組數(shù)據(jù)進(jìn)行曲線擬合的方法來實(shí)現(xiàn)。
3 姿態(tài)傳感器的實(shí)驗(yàn)數(shù)據(jù)處理
由于各軸的檢測原理是相同的,因此本論文采用x軸的檢測數(shù)據(jù)進(jìn)行實(shí)驗(yàn)驗(yàn)證。主要的實(shí)驗(yàn)儀器有被測姿態(tài)傳感器、經(jīng)緯儀、高低恒溫箱、高精度角度檢測儀等。表1所得數(shù)據(jù)是未經(jīng)溫度補(bǔ)償時的實(shí)驗(yàn)數(shù)據(jù),即原始數(shù)據(jù)。

3.1 第一次線性擬合
由于按照最小二乘法的基本步驟進(jìn)行擬合的計(jì)算量比較大,所以本文采用Matlab進(jìn)行數(shù)據(jù)處理,這樣不但可以減少復(fù)雜的計(jì)算過程,而且還可以保證較高的計(jì)算精度。
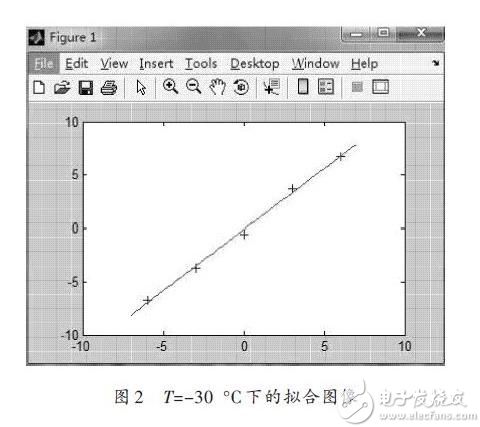
例如在溫度T=-30 °C的條件下,以理論角度x 為自變量,輸出角度y 為因變量,根據(jù)線性關(guān)系式y(tǒng) = mx + n ,計(jì)算出參數(shù)m 和n的值。具體計(jì)算程序如下:
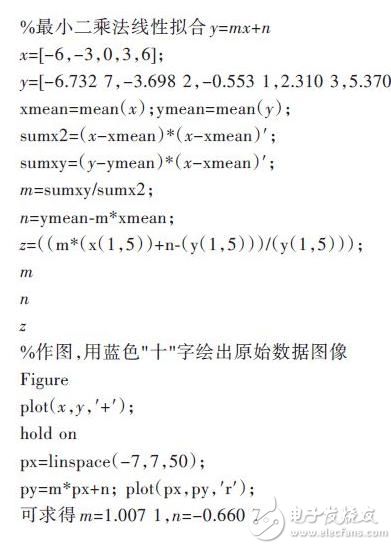
擬合圖像如下圖2所示。
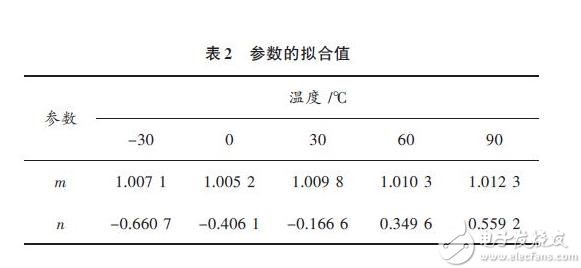
依次求出不同溫度下參數(shù)m 和n的值,計(jì)算結(jié)果如表2所示。
3.2 第二次曲線擬合
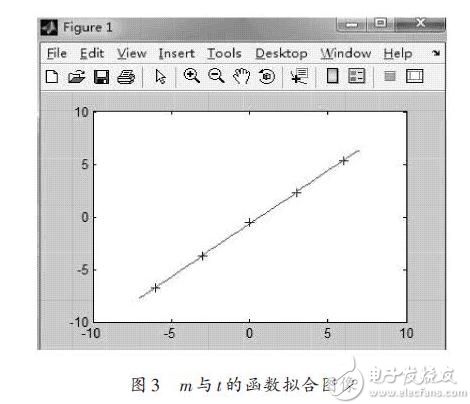
以參數(shù)m 為因變量,溫度t 為自變量,根據(jù)曲線擬合式mt = at2 + bt + c ,利用Matlab 求出a,b,c 的值,最終確定m 與t 的函數(shù)關(guān)系式。同理,可求得n 與t 的函數(shù)關(guān)系式。具體計(jì)算程序如下:
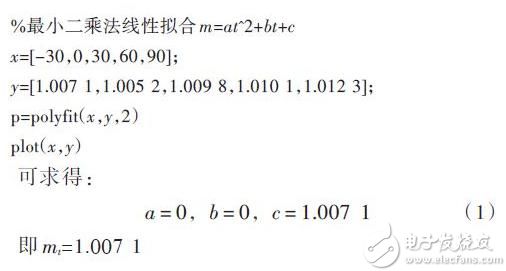
擬合圖像如圖3所示。
同理,求得n 與t 之間的函數(shù)關(guān)系式為:

4 實(shí)驗(yàn)數(shù)據(jù)的驗(yàn)證
傳感器未經(jīng)溫度補(bǔ)償時的輸出為y = mx + n ,即在t ℃時,無補(bǔ)償輸出為:

根據(jù)式(1)、(2)、(7)可得補(bǔ)償后的輸出值。償后的數(shù)據(jù)如表3所示。在表1中未補(bǔ)償前的最大誤差角度為0.682 7°,表3中補(bǔ)償后的最大誤差角度為0.261 6°,相對減少的誤差角度為0.421 1°。
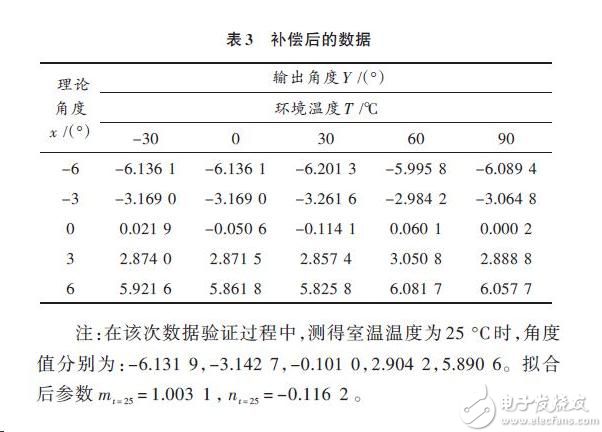
由表1和表3的數(shù)據(jù)對比結(jié)果可以看出,經(jīng)過溫度補(bǔ)償后的姿態(tài)檢測精度相比補(bǔ)償前有了很大的提高。
5 結(jié)語
由數(shù)據(jù)對比得出,在環(huán)境溫度變化的條件下,利用最小二乘法進(jìn)行溫度補(bǔ)償,可以達(dá)到預(yù)期的效果,因此這種方法可以運(yùn)用到工程實(shí)際中。
-
溫度傳感器
+關(guān)注
關(guān)注
48文章
3046瀏覽量
159138 -
mems
+關(guān)注
關(guān)注
129文章
4166瀏覽量
194369 -
三軸陀螺儀
+關(guān)注
關(guān)注
2文章
40瀏覽量
20631
發(fā)布評論請先 登錄
SDP810傳感器信號補(bǔ)償專題之溫度補(bǔ)償(一)

MEMS聲敏傳感器分類與應(yīng)用
MEMS替代傳統(tǒng)傳感器是大勢所趨嗎?
午芯芯科技國產(chǎn)電容式MEMS壓力傳感器芯片突破卡脖子技術(shù)
為什么講MEMS替代傳統(tǒng)傳感器是大勢所趨?
如何校準(zhǔn)溫度傳感器
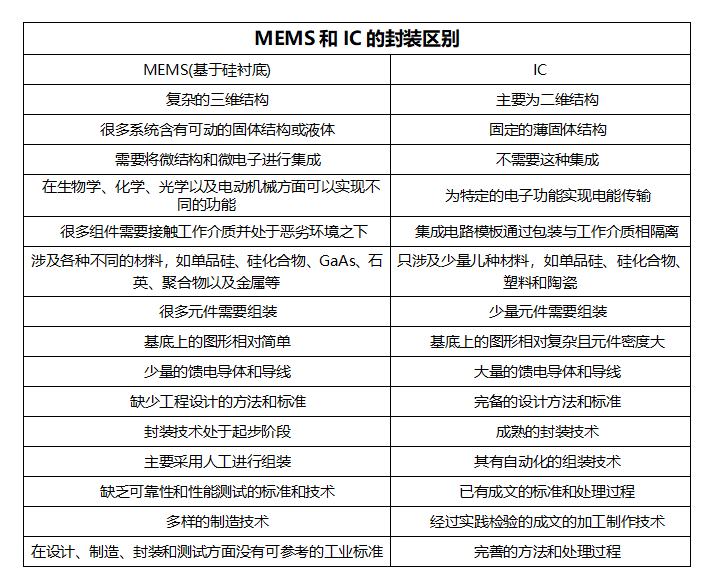
MEMS和傳統(tǒng)傳感器的區(qū)別
如何選擇合適的MEMS傳感器
MEMS傳感器應(yīng)用領(lǐng)域 MEMS技術(shù)在智能手機(jī)中的應(yīng)用
mems傳感器是什么意思_mems傳感器原理是什么
補(bǔ)償HVAC系統(tǒng)中的溫度和濕度傳感器

使用高精度溫度傳感器進(jìn)行溫度補(bǔ)償
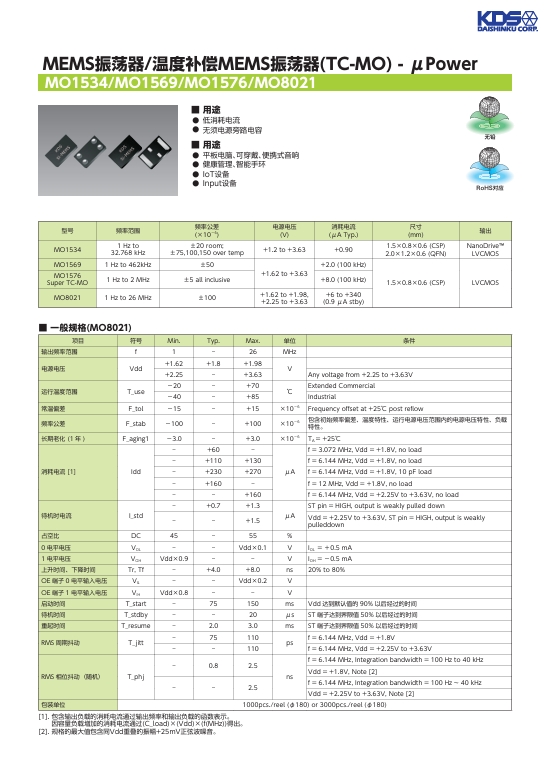
深入了解 MEMS 振蕩器 溫度補(bǔ)償 MEMS 振蕩器 TC-MO
深圳MEMS芯片設(shè)計(jì)-華芯邦科技芯制程第四代金屬氧化物半導(dǎo)體的高精度MEMS溫度傳感器芯片





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論