


經(jīng)過上次的介紹,我們可以看到UWB定位技術(shù)在室內(nèi)定位領(lǐng)域發(fā)揮的革新作用!在信息社會,萬物的位置信息發(fā)揮著至關(guān)重要的作用:廠房內(nèi)每件產(chǎn)品的擺放位置、安保現(xiàn)場每個安保人員的位置、物流倉庫里每一件產(chǎn)品的位置。。。在這個萬物互聯(lián)的時代,定位已經(jīng)成了信息社會運轉(zhuǎn)的核心要素。
GPS、北斗在室外定位方面已經(jīng)非常成熟;在室內(nèi)定位領(lǐng)域,UWB又是依據(jù)何種原理實現(xiàn)精確的室內(nèi)定位呢?
本節(jié)小編帶你解開UWB定位技術(shù)的神秘面紗。
UWB到 底是什么 ?
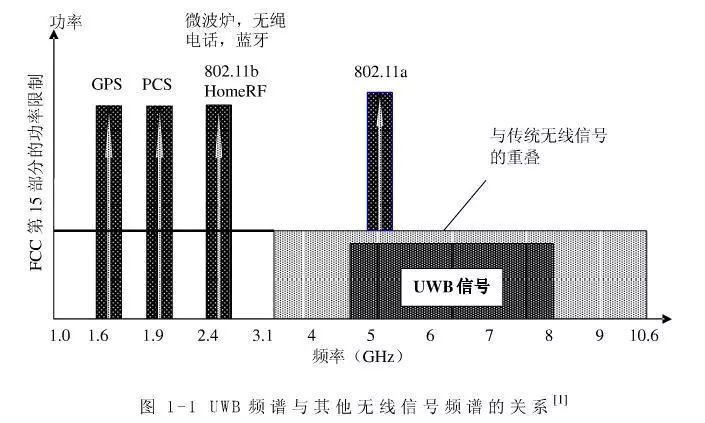
超寬帶無線通信技術(shù)(UWB)是一種無載波通信技術(shù),UWB不使用載波,而是使用短的能量脈沖序列,并通過正交頻分調(diào)制或直接排序?qū)⒚}沖擴展到一個頻率范圍內(nèi)。UWB的主要特點是傳輸速率高、空間容量大、成本低、功耗低等,必將成為解決企業(yè)、家庭、公共場所等高速因特網(wǎng)接入的需求與越來越擁擠的頻率資源分配之間的矛盾的技術(shù)手段。
UWB的基本測距原理是什么?
在說明這個問題之前,我們很有必要說說UWB測距的基本原理。
TOF(Time Of Flight飛行時間測距法)主要利用信號在兩個異步收發(fā)機(Transceiver)之間飛行時間來測量節(jié)點間的距離。雙向飛行時間法(TW-TOF,two way-time of flight)每個模塊從啟動開始即會生成一條獨 立的時間戳 。模塊A的發(fā)射機在其時間戳上的Ta1發(fā)射請求性質(zhì)的脈沖信號,模塊B在Tb2時刻發(fā)射一個響應(yīng)性質(zhì)的信號,被模塊A在自己的時間戳Ta2時刻接收。有次可以計算出脈沖信號在兩個模塊之間的飛行時間,從而確定飛行距離S。
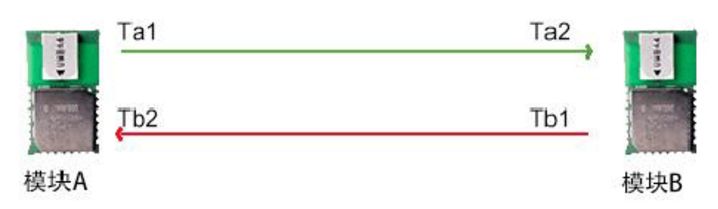
距離:S=Cx[(Ta2-Ta1)-(Tb2-Tb1)](C為光速)。
但是單純的TOF算法有一個比較嚴(yán)格的約束:發(fā)送設(shè)備和接收設(shè)備必須始終同步。這是一個比較棘手的問題,但是一種Double-sided Two-way Ranging的算法巧妙的避開了這個問題,它即利用了TOF測距的優(yōu)良特點,同時又極大的去除了TOF的同步問題,從而為TOF的實用化掃清了道路。
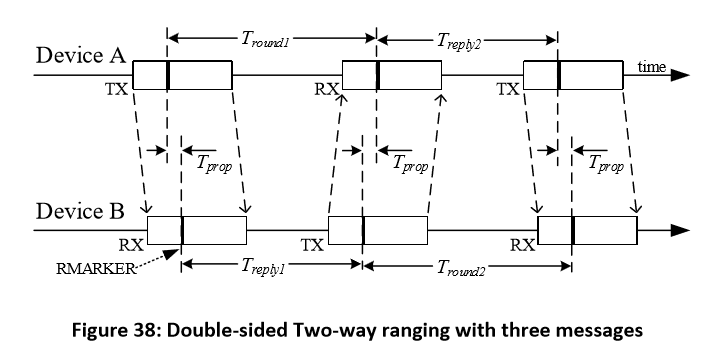

上面就是Double-sided Two-way Ranging算法的實際模型和計算飛行時間的公式,可以看到它在計算飛行時間時僅僅需要分別來自上面和下面定位設(shè)備的時間信息,而不需要兩部設(shè)備時間同步。
03
UWB的定位原理是什么?
定位算法中比較成熟的有:TOA(到達(dá)時間)、TDOA(到達(dá)時間差)、AOA(到達(dá)角度或稱為DOA估計)定位技術(shù)和這三種技術(shù)的混合技術(shù)。
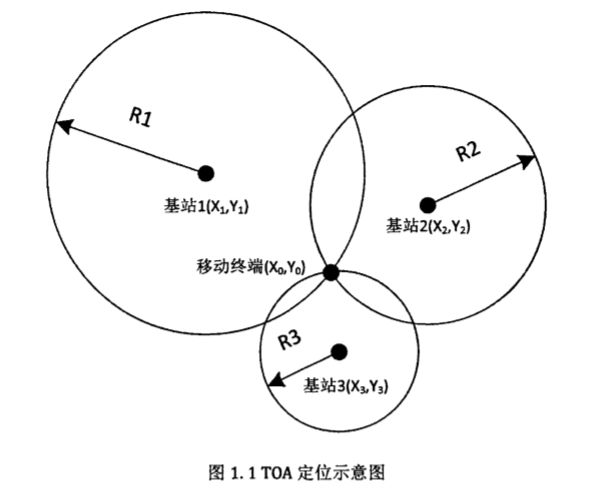
TOA通過分別測量移動終端與三個或更多基站之間信號的傳播時間來定位。它采用了圓周定位,
假如己知移動終端到基站i的直線距離尺Ri, 那么由幾何原理可知,移動終端的位置一定在以基站i的位置為圓心,Ri為半徑 的圓周上。即若移動終端的位置(X0,Y0),基站位置為(Xi,Yi),則兩者滿足如下 關(guān)系:

下面的圖非常形象的詮釋了TOA算法的原理:
然而事情都具有兩面性:TOA定位對傳播中產(chǎn)生的誤差比較敏感,這些誤差來自于傳播中的反射、 多徑傳播、非視距傳播和噪聲等干擾,會造成各圓無法相交或相交處不是一個點而是一個區(qū)域。同時TOA定位要求移動終端和基站之間在時間上要準(zhǔn)確同步,1ns的同步誤差將會給定位帶來大約0.3米的不確定性。納秒級的同步精度在 許多通信系統(tǒng)中是達(dá)不到的。因此,實際中很少使用單純的TOA定位。
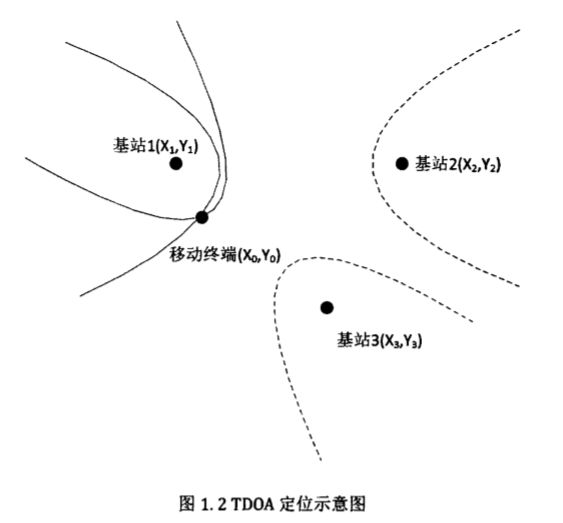
正因為如此,TDOA對TOA技術(shù)加以了改進(jìn)。
TDOA定位不必要進(jìn)行基站和移動終端之間的同步,而只需要基站之間進(jìn)行同步。因為基站的位置是固定的,基站之間進(jìn)行同步與基站和移動終端之間進(jìn)行同步要容易實現(xiàn)得多。這使得TDOA定位比TOA定位要更加容易實現(xiàn),所以 TDOA定位的應(yīng)用非常廣泛。
它通過測量出兩個不同基站與移動終端的傳輸時延差來進(jìn)行定位。假設(shè)移動終端的位置與基站1和基站2的距離差為R21=R2-R1,則移動終端的位置必定在以兩個基站為焦點,與兩個焦點的距離差恒為R21的雙曲線上。即若移動終端的位置為(X0,Y0),基站1位置為(X1,Y1),基站2位置為(X2,Y2),則它們滿足關(guān)系:

再通過另一組移動終端與基站1基站3或基站2基站3的TDOA,可以得到 另一組雙曲線,兩組雙曲線將最多產(chǎn)生兩個交點,再根據(jù)先驗知識(如半徑范圍 等)判斷出移動終端的位置。
它的基本原理可以從下面的圖得到良好的詮釋:
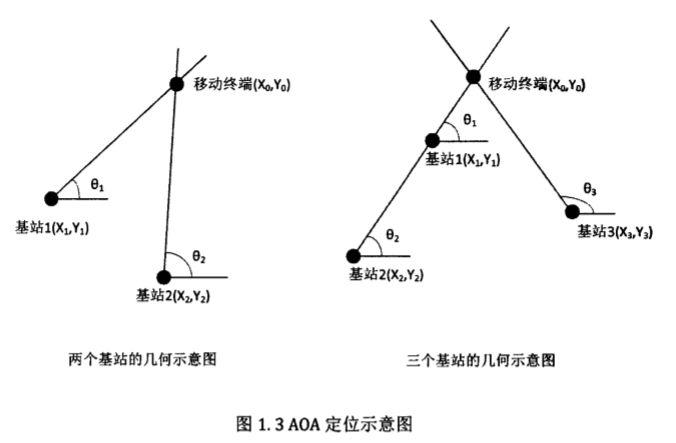
AOA估計也叫DOA(Direction ofArrival)估計或者方向識別DF(DirectionFinding)。
AOA的優(yōu)點是所需要的基站比較少,最少只要兩個基站就可以進(jìn)行定位。在LTE系統(tǒng)之前,由于以前的基站并沒有天線陣列,而只為了進(jìn)行定位而對基 站進(jìn)行更換,不僅需要投入龐大的資金也會破壞原有系統(tǒng)的結(jié)構(gòu)和工作模式,使通信系統(tǒng)無法正常工作,因此AOA定位并不受人重視。在LTE系統(tǒng)中應(yīng)用了 OFDM和多天線陣技術(shù),使得基于LTE的AOA定位成為了研究熱點。AOA的缺點是當(dāng)移動終端和基站的距離比較遠(yuǎn)的時候,即使有微小的定位角度的誤差,都會造成比較大的定位距離的偏差。因此AOA定位多見于中、短距離的定位。
下圖很好的詮釋了AOA的基本原理:
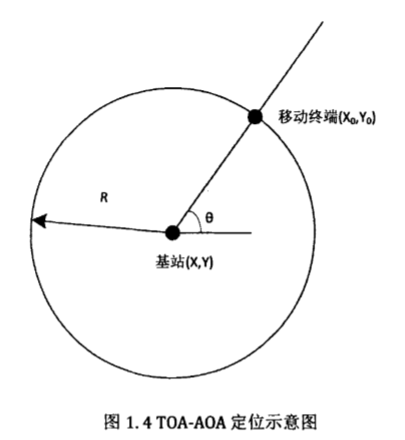
混合定位技術(shù)就是混合使用上述的兩種或三種定位技術(shù),比如TOA-TDOA、 TOA-AOA、TDOA-AOA等,通過檢測并提取相關(guān)的定位參數(shù),用于定位解算。混合定位技術(shù)可以運用多種定位參數(shù)實現(xiàn)定位,綜合不同定位技術(shù)的特點,在各 種定位技術(shù)的特性中取長補短,讓最終的定位性能得到優(yōu)化。
對于基于TOA-AOA的技術(shù),又叫圓角定位,利用這種方法可以實現(xiàn)利用單個基站進(jìn)行定位。首先利用TOA的值計算出移動終端和基站之間的距離R,那么可以確定用終端的位置在以基站為圓心,R為半徑的圓周上。接著利用天線陣 列測量出的移動終端到基站的AOA,作出一條射線。則射線與圓之間的交點就是移動終端的位置。若移動終端的位置為(X0,Y0),基站位置為(X,Y)在基站測得的移動終端發(fā)出的信號的到達(dá)角度為θ,基站和移動終端的距離為R,則他們滿足如下方程:

我們可以通過下圖形象地體會定位過程:
對于TDOA-AOA定位,可以通過下圖形象的理解其定位原理:
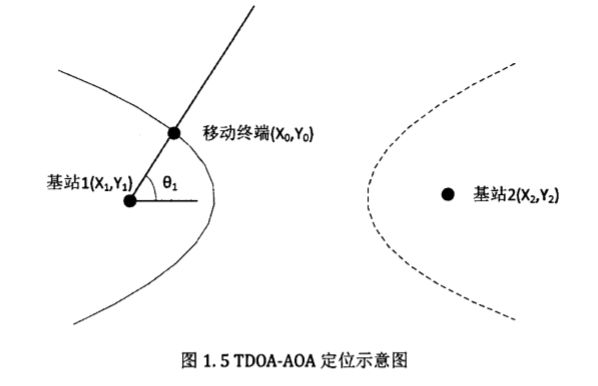
目前,混合定位技術(shù)是UWB定位研究領(lǐng)域中的新趨勢,具有廣大的發(fā)展前景。
-
UWB
+關(guān)注
關(guān)注
32文章
1175瀏覽量
62725
原文標(biāo)題:UWB技術(shù)詳解
文章出處:【微信號:RFCircle,微信公眾號:射頻圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論