") 機器人超聲波傳感器應(yīng)用技術(shù)
機器人超聲波傳感器應(yīng)用技術(shù)
隨著計算機技術(shù)、傳感器技術(shù)、人工智能的發(fā)展,移動機器的避障及自主導(dǎo)航技術(shù)已經(jīng)取得了豐碩的研究成果,應(yīng)用領(lǐng)域也在不斷地擴大,應(yīng)用復(fù)雜程度也越來越高。移動機器人的自主尋路要求已經(jīng)從之前簡單的功能實現(xiàn)提升到可靠性、通用性、高效率上來,因此對其相關(guān)技術(shù)提出了更高的要求。避障可以說是各種機器人最基本的功能,不然機器人一走動就碰到花花草草就不好了。機器人并不一定要通過視覺感知自己前方是否有障礙物,它們也可以通過觸覺或像蝙蝠那樣通過聲波感知。因此,檢測機器人前方是否存在障礙物的傳感器,可以分為接觸式和非接觸式的。

接觸式測障傳感器便是碰撞開關(guān)(圖1)。碰撞開關(guān)的工作原理非常簡單,完全依靠內(nèi)部的機械結(jié)構(gòu)來完成電路的導(dǎo)通和中斷。當(dāng)碰撞開關(guān)的外部探測臂受到碰撞,探測臂受力下壓,帶動碰撞開關(guān)內(nèi)部的簧片撥動,從而電路的導(dǎo)通狀態(tài)發(fā)生改變(圖2)。

非接觸式測障開關(guān)一般的工作原理與聲納和雷達相似,發(fā)射聲波或某種射線,遇到障礙物,聲波或射線被反射回來,并被傳感器接收,這時傳感器就認為發(fā)現(xiàn)了障礙物。
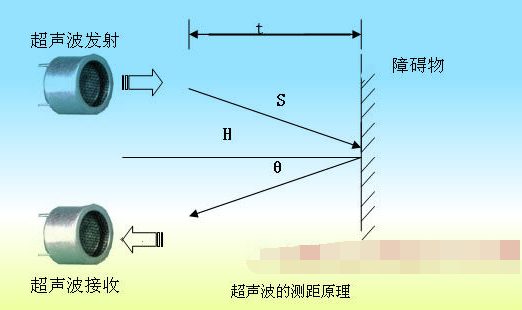
此外超聲波傳感器也是移動機器人避障、測距常用傳感器之一。超聲波傳感器是一個電子模塊,測量距離在3cm到400cm之間。它可以用于幫助機器人避開障礙物,或用于其他相關(guān)項目的距離測量和避障工程。超生波傳感器檢測距離原理是測出發(fā)出超聲波并在發(fā)射時開始計時,超聲波在空中傳播,在遇到障礙物時立即返回,超聲波接收器接收到反射波時立即停止計時。 聲波在空中的傳播速度為340米/秒。 使用定時器記錄的時間t計算出發(fā)點到障礙物的距離s,即s = 340×t / 2。由于超聲波在空氣中的速度與溫濕度有關(guān),在比較精確的測量中,需把溫濕度的變化和其它因素考慮進去。超聲波傳感器一般作用距離較短,普通的有效探測距離都在5-10m之間,但是會有一個最小探測盲區(qū),一般在幾十毫米。由于超聲傳感器的成本低,實現(xiàn)方法簡單,技術(shù)成熟,是移動機器人中常用的傳感器。但是傳感器安裝在機器人上時距離地面不能太近,太近容易產(chǎn)生干擾信號,而且容易將可以翻越的障礙物當(dāng)成無法逾越的障礙物。傳感器兩探頭間的距離不能太遠也不能太近,太遠測量誤差過大,太近串?dāng)_信號過強。
關(guān)于機器人測距、避障工釆網(wǎng)小編推薦MaxBotix 機器人超聲波傳感器 - MB7066
機器人超聲波傳感器 - MB7066是一種堅固的超聲波傳感器組件模塊。這種戶外傳感器提供了很短的遠距離探測,并在一個緊湊、堅固的PVC外殼中進行測距。超聲波傳感器符合IP67進水標準,符合標準電氣3 / 4英寸PVC管件。是我們最長的戶外、耐氣候【(IP67),可選的化學(xué)抗性f選項】、超聲波傳感器,專為您的項目或產(chǎn)品的簡單集成而設(shè)計其中42kHz超聲波傳感器測量距離物體的距離最大范圍1068厘米(450英寸),操作溫度為-40?C + 70?C(-40?F + 160?F)。在高輸出聲功率與連續(xù)可變增益、實時背景自動校準、實時波形特征波形特征分析、噪聲抑制算法等都能有效地實現(xiàn)無噪聲距離讀數(shù)。即使在許多聲學(xué)或電子噪聲源存在的情況下,這種情況也是成立的。機器人超聲波傳感器是用于匹配窄傳感器束模式的工廠,并提供可靠的遠程探測區(qū)域。
發(fā)布評論請先 登錄
相關(guān)推薦
Sonair推出用于機器人避障的3D超聲波傳感器
典型的超聲波傳感器及其應(yīng)用領(lǐng)域
超聲波傳感器是模擬還是數(shù)字
超聲波傳感器輸出的是什么信號
解讀工業(yè)機器人避障常用的視覺傳感器、激光傳感器、紅外傳感器、超聲波傳感器

超聲波傳感器中的保護膜的作用是什么?
超聲波傳感器的工作原理 超聲波傳感器的聲波頻率是多少
超聲波液位傳感器的工作原理 超聲波液位傳感器型號
超聲波傳感器形成超聲波的原理
超聲波傳感器和超聲波測距原理分析
超聲波傳感器的硬件組成及類型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論