 高端MEMS固體波動陀螺的發展歷程、研究現狀、應用以及未來發展方向
高端MEMS固體波動陀螺的發展歷程、研究現狀、應用以及未來發展方向
引言
1890年,物理學家Bryan G H發現撓性半球可測量轉動的Bryan G H理論。1988年美國加州大學伯克利分校Muller研究小組發明了轉子直徑為60~100 μm的硅靜電電機。至此,MEMS陀螺就以其體積小、質量輕、功耗低、適于批量化生產,而受到各發達國家的重視,紛紛展開研究和應用。旋轉振動結構、旋轉盤結構、振動盤結構、線振動結構、正交線振動結構(振動平板結構、振動梁結構、振動音叉結構和加速度計振動結構)和非正交線振動結構(薄壁半球共振、共振圓柱結構和共振環結構)MEMS陀螺相繼出現。據國外研究者分析,按MEMS陀螺不同的工作原理、技術方案、加工工藝的可能組合選擇方案達2000種以上。同時,系統技術的進步和工藝水平的提高,也給MEMS慣性技術的發展帶來了新的機遇,MEMS慣性儀表的性能在很短的幾十年內得到了迅速的提高,并不同程度得到廣泛應用。其中,消費用MEMS陀螺大多采用傳統的音叉結構,無法滿足高精度,特殊環境下的應用需求。
在國外,軍用高端MEMS陀螺技術路線和商用MEMS陀螺技術路線完全不同,軍用高端MEMS陀螺技術路線,基本都是采用環境適應性好的全對稱結構。美國國防預先研究計劃局(DARPA)的微型PNT(Micro-PNT)項目重點支持多環諧振盤陀螺(DRG)和微半球陀螺(VRG)的研制,取得很好結果。2015年,DARPA新啟動的高級慣性微傳感器(AIMS)項目,強調只支持結構上全對稱的二維或三維的CVG-II型陀螺研制。英國BAE系統公司在20世紀90年代開始諧振環陀螺研制,產品已批量用于APKWS制導炸彈、NLAW反裝甲武器以及155 mm雷神制導炮彈和衛星等。它相對于目前調諧音叉式、平板振動式、殼體振動式等MEMS陀螺技術具有高精度、高動態范圍、抗過載能力強,能直接測量轉動角度,避免了后續積分電路或算法帶來的動態誤差以及角度和角速率模式之間的切換、便于批量生產等獨特優勢,成為未來多種中高精度武器載體平臺,尤其是高動態旋轉制導炮彈及火箭彈用慣性導航系統的有效技術。
發達國家始終未停止對高性能環形全對稱結構MEMS慣性器件的研制步伐,已在實戰中經過檢驗,實現了以全對稱環形固體波動陀螺的“中高精度、低成本、高可靠、大批量、中端軍用”應用設想。而且,新一代高精度硅微半球和全對稱環形固體波動陀螺及其多陀螺陣列集成技術正在興起。
01
固體波動陀螺到MEMS陀螺的發展歷程
1固體波動理論與哥氏力陀螺
1960年,固體波動陀螺經歷了金屬半球諧振陀螺(HRG)、石英HRG的研制與升級,又演化為基于MEMS工藝的三維、二維諧振陀螺。最終確立了高端MEMS諧振陀螺的發展方向與技術路線。
固體波動陀螺的基本原理是:旋轉軸對稱物體(諧振子)中被激勵的駐波轉動角與輸入角速率在其對稱軸上的投影成一定比例。該原理利用了旋轉軸對稱物體中彈性波慣性效應,即駐波進動特性。
如圖1所示,質量塊P固連在旋轉坐標系的xoy平面,若沿x軸方向以相對旋轉坐標系的速度v運動,旋轉坐標系繞z軸以角速度ω旋轉。在質量塊P上哥氏效應產生的哥氏力為:Fcor=2m(v×ω)。其中,m為質量塊P的質量。

圖1 振動式陀螺工作原理
可見,哥氏力Fcor與質量塊P上的輸入角速度ω成正比,并引起質量塊在y軸方向產生的位移(輸入角速度的信息)。概而言之,振動陀螺的振動部件受驅動而在第一振動模態(又稱驅動模態,如圖1質量塊P沿x軸運動),當與第一振動模態垂直的方向有旋轉角速度輸入時(如圖1沿z軸的旋轉角速度),振動部件因哥氏效應產生了一個垂直第一振動模態的第二振動模態(又稱敏感模態,如圖1質量塊P沿y軸產生的位移),該模態直接與旋轉角速度成正比。各類不同結構形式的振動陀螺實際上都是運用了同樣原理。
諧振環式陀螺由振環、支撐梁及驅動、檢測控制電極組成,基于對稱性的考慮需要至少8個彈簧梁使結構平衡并有2個相同自然頻率的彎曲模態,如圖2所示。在靜電力(或電磁力)驅動下諧振環在一個平面內以固定幅值、橢圓形進行一階彎曲模態振動,當它圍繞法線軸旋轉時,哥氏力將使得振動能量轉移到相位差45°的二階檢測振動模態,二階檢測振動模態的振動幅值與輸入角速率成比例,并可以用電容的變化來檢測。
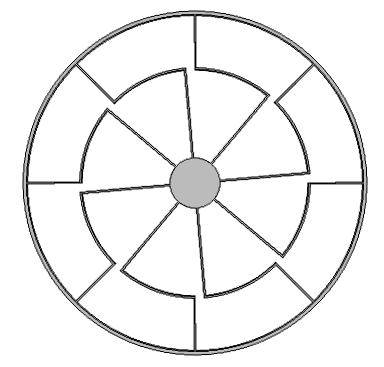
圖2 諧振環結構陀螺
2從HRG到MEMS平面陀螺的演化
HRG是固體波動陀螺的具體實現。1965年,David L博士完成全對稱HRG的理論建模分析。1975年,美國Delco公司研制出世界上第一個半球諧振陀螺,精度達50 (°)/h;后來采用高Q值石英材料,1980年精度達到1 (°)/h。1996年,利頓公司收購Delco公司為美國哈勃望遠鏡計劃研制高性能石英HRG,指標為:量程為0.5 (°)/s,零偏穩定性為0.00008 (°)/h,角度隨機游走 0.00001(°)/h1/2。
2000年、2009年、2011年,Kristiansen和Shatalov以及任順清等學者分別建立了圓柱形諧振陀螺和半球諧振陀螺的等效方程,從而利用簿殼力學中的能量原理給出了兩種結構振動陀螺的動力學方程,為圓柱形諧振陀螺和半球諧振陀螺的研究發展做出巨大貢獻。
2000年,利頓公司被諾格公司收購,該公司研制500多個HRG陀螺分別用于美國金星探測和彗星撞擊等重大宇航任務。研究表明半球諧振陀螺在性能上幾乎沒有物理限制,發展潛力很大。但半球諧振陀螺是三維結構,加工工藝復雜,制造難度大,無法實現低成本批量化生產。在發展過程中有多種結構變化,衍生出多種二維結構,如圖3所示。這些二維結構非常適合目前的MEMS制造工藝,可實現低成本批量化生產。
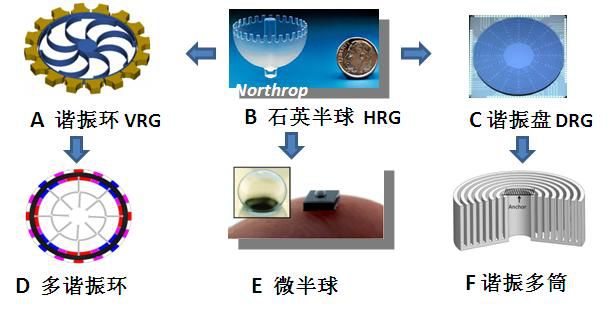
圖3 半球諧振陀螺的發展與衍變
圖3(A)的諧振環陀螺是半球陀螺的一種簡化形式。英國古德里奇公司、BAE公司(大西洋慣性系統分公司)從早期的金屬筒型結構VSG-1起,始終致力于環形陀螺的研究,自20世紀90年代開始諧振環陀螺的研制,逐漸演進至新的壓電材料環形陀螺VSG-5。其歷代貨架產品CRS03、CRG20、CRM100/200等系列產品占據世界中高端MEMS陀螺市場很大份額,并應用于英、美、瑞典、土耳其等國的制導彈藥武器。目前已研制到第四代,最新產品陀螺零偏穩定性已達到0.1 (°)/h1/2。
美國多所大學也開展了新型全對稱結構陀螺的研究。其中,密歇根大學Ayazi博士2000年完成世界第一款MEMS全對稱環形陀螺,陀螺零偏穩定性達到5 (°)/h。2008年,Zaman博士進行諧振星型結構改進,陀螺零偏穩定性已達到2.5 (°)/h。圖3(c)為伯克利大學等幾個學校聯合研制的諧振盤陀螺,直徑0.6 mm、厚度20 μm,樣品精度達到3.27 (°)/h。圖3(F)是密歇根大學研發的多筒諧振速率積分陀螺,諧振頻率為3 kHz,Q值72000,零偏為129 (°)/h,角度隨機游走系數達到0.09 (°)/h1/2。
02
國外軍用MEMS諧振陀螺研制現狀
1從HRG到MEMS平面陀螺的演化
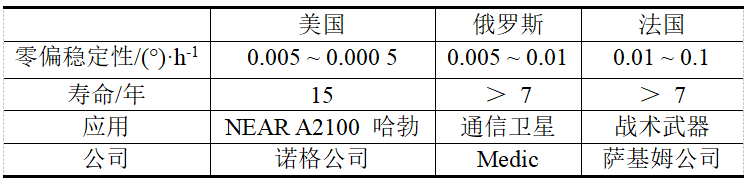
1996年,美國首次在空間應用HRG姿態敏感單元,約125套累計飛行2×107h。俄羅斯、法國等國發展迅速,均取得了良好應用效果。HRG被國際慣性界認為是21世紀廣泛用于各類運載器捷聯系統中最理想的器件,國外HRG對比如表1所示。
表1 國外HRG研制水平對比
2MEMS諧振陀螺研制現狀
MEMS諧振環陀螺源于石英HRG,是HRG的簡化結構形式。與HRG相比,除了保持HRG敏感結構全對稱、高精度、環境適應性好,適合應用在性能要求高并且環境惡劣的航天及軍事等領域外,還具有結構簡單、可靠、體積小、便于批量化集成制造。目前,諧振環陀螺已經發展到第四代產品,如圖4所示,逐漸從機械陀螺轉變為MEMS硅基陀螺。
第一代諧振環陀螺
第一代諧振環陀螺產品采用圓柱殼體的陶瓷結構,類似于傳統陀螺,研制平臺主要為機械加工平臺。其特點是敏感結構采用機械加工手段制備、體積大、敏感信號強、采用傳統組織工藝技術。
第二代諧振環陀螺
第二代諧振環陀螺產品通過驅動和檢測技術的進步簡化了結構,但和第一代產品類似,研制平臺主要為機械加工平臺。
第三代諧振環陀螺
第三代諧振環陀螺產品采用了新的MEMS加工技術,通過電磁激勵和電流檢測,使陀螺的體積變小,性能得到大幅度提升。其特點是:a)敏感結構采用MEMS技術加工,并且使用激光修調技術對兩個諧振模態間的頻差進行調節(頻差<1 Hz),通過兩模態間的匹配增強能量轉換能力,提高器件性能;b)采用微電子封裝技術(金屬管殼)和傳統組裝技術(磁芯裝配)的結合進行產品封裝。其研制平臺是機械加工平臺、微電子平臺和MEMS平臺的結合。
第四代諧振環陀螺
第四代諧振環陀螺產品采用了全新的MEMS加工技術,去除了陀螺內部的磁芯結構,通過電容激勵、電容檢測、修調等技術,使陀螺的性能、體積、功耗等得到大幅度提升。其器件特點是:
a)敏感結構采用MEMS技術加工;
b)使用修調技術對兩個諧振模態間的頻差(<0.1 Hz)進行調節,通過兩模態間的匹配增強能量轉換能力,提高器件性能;
c)采用專用處理電路和微處理器結合進行信號檢測和處理;
d)采用MCM封裝形式進行陀螺儀封裝。
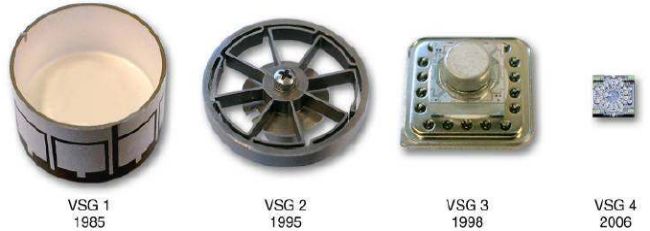
圖4 硅微機械陀螺儀發展歷程
第四代諧振環陀螺研制平臺是微電子平臺和MEMS平臺的結合,產品的技術特點也是目前世界上主流MEMS陀螺產品的發展趨勢,主要特點包括:
a)敏感結構采用高真空封裝,Q值很高;
b)對敏感結構進行調節,提高敏感結構的固有特性和成品率;
c)采用專用處理電路,提升信號處理和敏感結構調節能力;
d)采用微處理器,提升產品的內部補償和環境適應性;
e)采用MCM一體化封裝技術,減小體積,提高穩定性;
f)采用系統級設計,進行敏感結構、處理電路、微處理器、以及封裝等陀螺儀各部分之間的匹配,充分發揮系統各部分的技術優勢,彌補相互間的技術瓶頸,實現系統性能的最大化。
具有上述特點的硅基MEMS陀螺儀已經逐步由新興走向成熟,進而走向系統集成化道路,實現MEMS慣性測量單元(IMU)等系統的應用。
英國BAE系統公司采用MEMS諧振環陀螺實現了MEMS IMU系列化,最小體積僅有16 cm3,是目前世界上最小的IMU單元,可以把此IMU植入到士兵的戰靴中,實現單兵全時導航。BAE公司MEMS IMU系列化如圖5所示,此類型陀螺具有超高抗高沖擊能力,并且采用數字閉環電路控制,通過改變標度因數控制環路的參數,其量程在600~12 000 (o)/s的范圍內可調整,零偏穩定性<0.1 (°)/h。BAE生產的諧振環陀螺有角速率和速率積分兩種模式,研制的產品用于高速旋轉彈、中程導彈和美國155 mm制導神箭炮彈等武器系統。ESA研究的空間用MEMS諧振環陀螺已在2012年Cryosat2衛星完成在軌驗證,并將用于2018年發射的火星車(ExoMars rover)。
日本硅傳感系統公司(SSS)一直從事MEMS諧振環陀螺研制,最新產品零偏穩定性優于0.06 (°)/h,角度隨機游走優于0.01 (°)/h1/2,是諧振環陀螺的最高水平。
圖5 BAE系統公司系列化MEMS IMU
3MEMS碟形陀螺研制現狀
MEMS碟形陀螺是目前MEMS陀螺中報導精度最高的陀螺器件,也是目前最熱門的平面工藝MEMS陀螺結構之一。
早在1994年波音公司研制的半球諧振陀螺就應用于波音公司的TDRS HIJ衛星上,并于2000年用于第二代TDRS衛星,同時開展MEMS陀螺研制,研制路線如圖6所示。
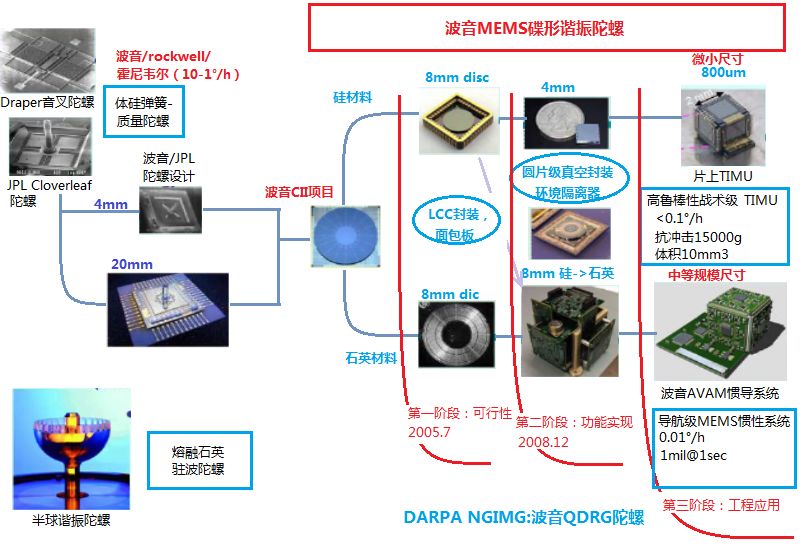
圖6 波音公司高性能MEMS陀螺研制路線圖
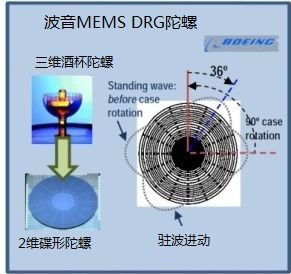
圖7 MEMS 碟形陀螺
基于HRG和其它MEMS陀螺的研制基礎,噴氣推進實驗室和波音公司把HRG和音叉式MEMS陀螺結合,提出了多環結構的MEMS碟形陀螺方案,即多環諧振盤陀螺。多環諧振盤陀螺包括一系列的同心圓盤,各同心環通過微梁與中心圓盤相連接,如圖7所示。這種多同心環結構減少了半徑剛度,它的多同心環設計實現結構的全對稱性,全對稱結構的敏感結構可以減少驅動和檢測模態的正交耦合,從而實現硅微陀螺驅動模態與檢測模態間的匹配。多環的設計不僅大大增加了電極區域,提高了檢測和驅動的電容,從而提高了陀螺的檢測靈敏度,也增加了有效質量,而增加有效質量對降低噪聲水平非常關鍵,采用多環和多檢測電極解決了環陀螺信噪比低的難點。在美國DARPA導航級集成微陀螺儀(NGIMG)項目支持下,諧振盤陀螺的研究取得了突破性進展,基于8 mm直徑硅材料的諧振盤陀螺實現了零偏穩定性優于0.01 (°)/h,角度隨機游走優于0.002(°)/h1/2。為進一步縮小和HRG的性能差距,基于8 mm直徑石英玻璃材料或更大直徑的諧振盤陀螺正在研制中。預期目標是諧振盤陀螺的Q值提高一到兩個數量級,角度隨機游走提升一個數量級。
2013年,MEMS諧振盤陀螺研制團隊從波音公司和噴氣推進實驗室剝離,成立SIM(Sensor in Motion)公司,專業從事諧振盤陀螺的研發與生產。依靠30多年積累的技術和經驗,生產高性能低成本導航級諧振盤陀螺,產品代表MEMS陀螺最高水平,達到激光和光纖陀螺性能。基于諧振盤陀螺的指北儀體積180 cm3,質量0.11 kg。
在軍用、航天航空等領域,MEMS陀螺中,諧振環陀螺和多環碟形諧振盤陀螺產品化水平最高,并在武器裝備中得到廣泛應用。
03
未來高端MEMS陀螺發展方向
1美國高端MEMS陀螺研制計劃
美國等西方發達國家非常重視MEMS慣性系統與器件的研制,DARPA針對MEMS慣性器件的研制制定了很多具體的計劃,具有重要的參考價值。其中DARPA MTO在器件級有兩項陀螺研究項目,一個為NGIMG,一個是微速率積分陀螺儀(MRIG)項目。
NGIMG項目主要研發低功耗微型角速率傳感器,在沒有GPS信號時為單兵、車輛、無人機和大型作戰平臺提供支撐。研究目標為:零偏穩定性0.01 (°)/h,角度隨機游走0.001 (°)/h1/2,波音公司多環諧振盤陀螺,圖3(C)為重點研制方案。
2011年,DARPA啟動的MRIG項目專門研制微半球陀螺,如圖3(E)所示,目的是為高動態的空間武器提供支撐。研究目標為:量程15000 (°)/s,零偏穩定性0.01 (°)/h,刻度因子重復性0.01ppm。該項目鼓勵結構創新,美國有八所大學參加研制,設計了多種創新的結構和3D制作工藝方案。
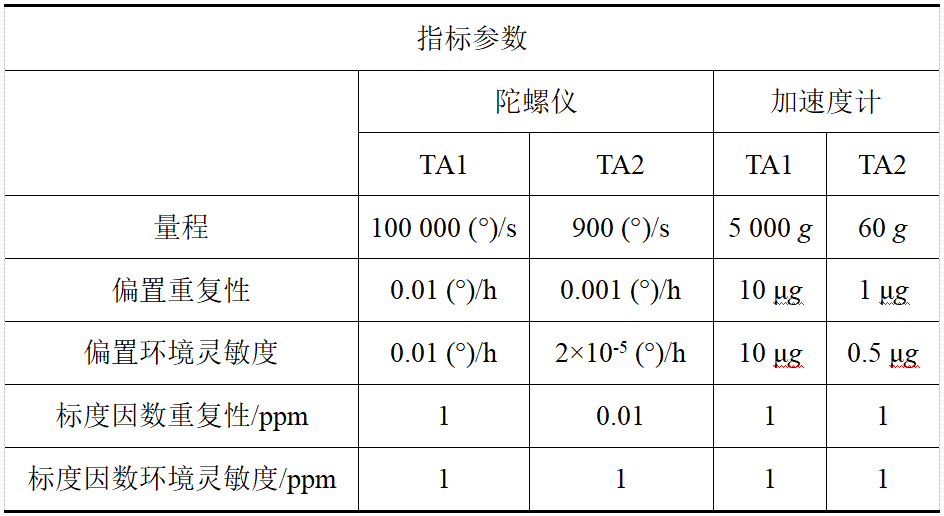
2015年,針對高級慣性器件DARPA新啟動精確魯棒慣性制導彈藥(PRIGM)項目,研制高級新型低SWaP+C先進慣性微傳感器(AIMS),滿足在高沖擊和高振動環境,具有高動態范圍、低噪音、高精度的慣性器件,詳細指標如表2和表3所示。其中,TA1為高動態環境器件指標,TA2為高精度和高穩定性器件指標。
表2 DARPA高級慣性微傳感器AIMS研制指標(a)
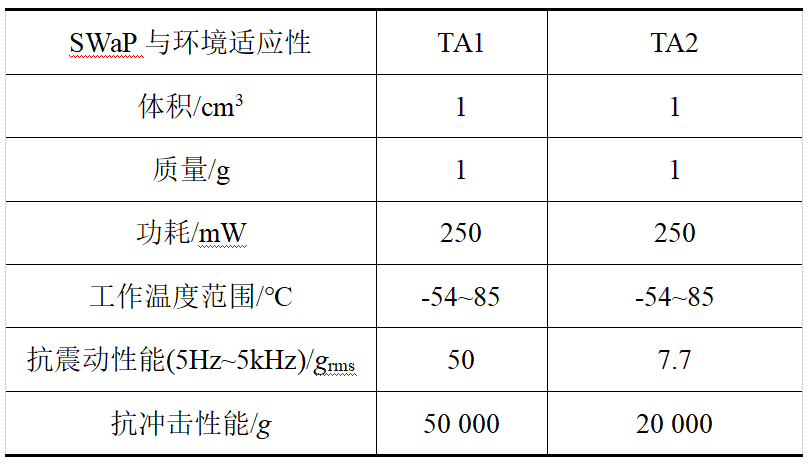
表3 DARPA高級慣性微傳感器AIMS研制指標(b)
如圖8~10所示,AIMS項目重點支持的三個陀螺研制方向為:1)速率積分陀螺;2)光檢測MEMS陀螺;3)片上光波導陀螺。同時,DARPA強調只支持結構上高度對稱的二維或三維的MEMS陀螺研制,不支持音叉型MEMS陀螺。
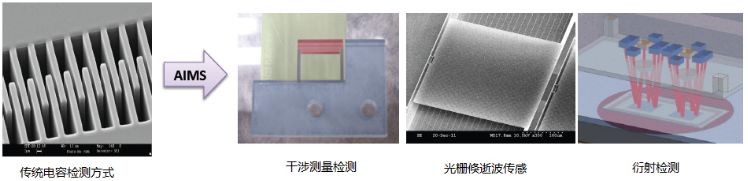
圖8 AIMS計劃發展的光學MEMS陀螺
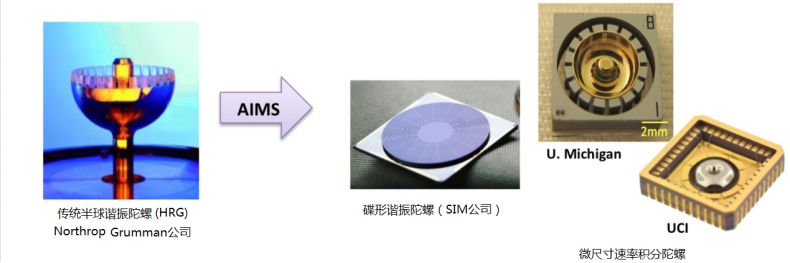
圖9 AIMS計劃發展的速率積分陀螺
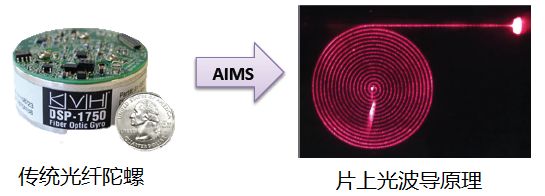
圖10 AIMS計劃發展的片上光波導陀螺
2未來高端MEMS陀螺關鍵技術
MEMS陀螺將不斷突破、引入許多關鍵技術,逐步提高精度,在未來的高端應用領域能得到越來越廣泛的應用。
靜電平衡調整技術
MEMS工藝誤差總是不可避免的,高精度MEMS陀螺對工藝誤差非常敏感。工藝誤差會使器件剛度與阻尼不對稱,驅動模態與敏感模態存在頻差,陀螺靈敏度降低,精度大打折扣。工藝誤差存在隨機性,因此要得到高精度MEMS陀螺往往是“百里挑一”。對工藝誤差進行校正、調整,使高精度MEMS陀螺做到由“百里挑一”變為“百個如一”,是目前保障高精度陀螺成品率的重要技術途徑。靜電平衡調整技術是高效率、低成本的工藝誤差調整技術手段。靜電平衡調整可通過靜電負剛度效應,調整剛度對稱性,使驅動模態和敏感模態頻率趨于一致,以提高精度。靜電平衡調整技術涉及靜電平衡基礎理論、靜電平衡電極排布、調整電壓判據及測試、靜電電壓施加方法、靜電調節自動化等,是未來高端MEMS陀螺的重要關鍵技術。
速率積分控制技術
速率積分陀螺,也稱全角模式陀螺。速率積分陀螺相對于速率陀螺具有很多優勢:速率積分陀螺動態范圍更大、沒有帶寬限制、噪聲誤差不隨時間累積等。因此速率積分陀螺是未來高精度陀螺的重要發展方向之一。速率積分控制技術是實現速率積分陀螺的關鍵技術。
原子級時鐘鎖頻技術
原子級鎖頻MEMS陀螺,是基于原子級鎖頻技術以提高精度的MEMS陀螺。應用于MEMS陀螺的原子級鎖頻技術,旨在使MEMS陀螺諧振頻率與一個極精準的頻率基準(原子鐘級別的精度)同步,利用“原子鐘級別”的頻率精確性,將MEMS陀螺諧振頻率鎖定在恒定值,不受環境影響而變化。原子級鎖頻技術可使MEMS諧振陀螺的角度隨機游走與零偏穩定性提高幾個數量級,從而使陀螺精度具有跨越式提升。原子級鎖頻技術是大幅提高MEMS陀螺精度極具潛力的技術。
系統自校準技術
自校準技術是指傳感器上電后對零位輸出進行自動校準、歸零的技術。通過自校準技術,抵消陀螺零偏輸出,消除陀螺多次上電零偏不一致的問題,對提高零偏重復性,尤其是提高長時間角度檢測的精度有重要的作用。自校準技術是保障MEMS慣性傳感器精度的又一技術瓶頸。
光檢測技術
光學檢測方法具有結構簡單、精度高、穩定性好、抗電磁干擾等優點,將光學檢測與MEMS傳感器相結合,使測量精度更高、測量更加智能化,具有廣闊的市場前景。
高Q值技術
高Q值是提高陀螺靈敏度的重要途徑,是未來高精度MEMS陀螺的關鍵技術之一。
04
總結與啟示
綜上所述,HRG是一種典型的固體波動陀螺,具有很高的精度,并已得到廣泛應用。但HRG加工難度大,批生產能力差,因此逐步衍生除了適合平面加工工藝的MEMS諧振環陀螺和諧振盤陀螺。具有全對稱特性的MEMS平面陀螺具有良好的環境適應性,美國和歐洲多家軍工企業MEMS陀螺均采用全對稱特性的MEMS平面陀螺設計與加工技術,并在導彈、炮彈、衛星及空間飛行器上得到廣泛應用,是未來高端MEMS陀螺研制的方向。
-
MEMS陀螺
+關注
關注
0文章
5瀏覽量
2318
原文標題:高端MEMS固體波動陀螺的發展與應用
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論