") CAN系列協(xié)議和以太網(wǎng)協(xié)議在汽車電子中的應(yīng)用
CAN系列協(xié)議和以太網(wǎng)協(xié)議在汽車電子中的應(yīng)用
作者| 北灣南巷
出品|汽車電子與軟件
本文旨在深入探討現(xiàn)代汽車電子系統(tǒng)中關(guān)鍵的通信協(xié)議,包括CAN(Controller Area Network)、CAN FD(Flexible Data-Rate)、CAN XL(Extended Length)、以及以太網(wǎng)協(xié)議,并分析它們在汽車應(yīng)用中的具體表現(xiàn)和優(yōu)勢。
#01CAN系列協(xié)議和以太網(wǎng)協(xié)議介紹
CAN協(xié)議:CAN協(xié)議最初由Bosch開發(fā),已成為汽車領(lǐng)域中最廣泛應(yīng)用的網(wǎng)絡(luò)協(xié)議之一。它具有高度可靠的消息傳遞能力和實時性,適用于控制系統(tǒng)和傳感器之間的通信。CAN協(xié)議的優(yōu)勢包括低成本、抗干擾能力強、支持多節(jié)點和實時響應(yīng)。然而,傳統(tǒng)的CAN協(xié)議在數(shù)據(jù)傳輸速率上存在限制,無法滿足現(xiàn)代復(fù)雜系統(tǒng)對高帶寬的需求。
CAN FD協(xié)議:為了克服傳統(tǒng)CAN協(xié)議的帶寬限制,CAN FD協(xié)議應(yīng)運而生。CAN FD允許更高的數(shù)據(jù)傳輸速率和更大的數(shù)據(jù)幀,提供了更靈活的數(shù)據(jù)傳輸選項。它保留了傳統(tǒng)CAN的實時性和可靠性優(yōu)勢,同時能夠處理更多的數(shù)據(jù)量,適應(yīng)了現(xiàn)代汽車系統(tǒng)日益增長的數(shù)據(jù)需求。
CAN XL協(xié)議:CAN XL是CAN FD的進(jìn)一步擴(kuò)展,旨在進(jìn)一步增加數(shù)據(jù)傳輸速率和靈活性。它支持更大的數(shù)據(jù)幀和更高的傳輸速率,為未來的汽車應(yīng)用提供了更多的擴(kuò)展性和性能潛力。CAN XL協(xié)議在處理復(fù)雜的汽車控制和傳感器數(shù)據(jù)時能夠提供更高的效率和響應(yīng)速度。
以太網(wǎng)協(xié)議:隨著汽車電子系統(tǒng)變得更加復(fù)雜和互聯(lián),以太網(wǎng)協(xié)議開始在汽車領(lǐng)域中嶄露頭角。以太網(wǎng)具有更高的數(shù)據(jù)傳輸速率和更大的帶寬,能夠支持大規(guī)模數(shù)據(jù)的傳輸和實時處理需求。它使得車載網(wǎng)絡(luò)能夠與云服務(wù)、高清視頻流、遠(yuǎn)程診斷等現(xiàn)代汽車應(yīng)用無縫集成。
優(yōu)勢分析:
CAN系列協(xié)議的優(yōu)勢:確保了實時性和可靠性,適用于對延遲和穩(wěn)定性要求高的控制應(yīng)用,如發(fā)動機控制、剎車系統(tǒng)等。
以太網(wǎng)協(xié)議的優(yōu)勢:提供了更高的帶寬和擴(kuò)展性,適用于處理大規(guī)模數(shù)據(jù)傳輸,支持高清視頻、大容量軟件更新等應(yīng)用,有助于實現(xiàn)高級駕駛輔助系統(tǒng)(ADAS)和自動駕駛技術(shù)的發(fā)展。
綜上所述,本文將深入分析每種協(xié)議的特點、適用場景以及在現(xiàn)代汽車電子系統(tǒng)中的具體應(yīng)用,以幫助讀者更好地理解和應(yīng)用這些關(guān)鍵的通信技術(shù)。
#02CAN協(xié)議及其汽車應(yīng)用
2.1、CAN簡介
基本概念:
CAN(Controller Area Network,控制器局域網(wǎng)絡(luò))是一種串行通信協(xié)議,最初由德國Bosch公司在1983年提出,旨在解決汽車電子系統(tǒng)中節(jié)點間通信的問題。它被設(shè)計用于在車輛內(nèi)部各個控制單元(ECU)之間進(jìn)行可靠且實時的數(shù)據(jù)傳輸,如發(fā)動機控制單元、制動系統(tǒng)、儀表盤等。
特點:
實時性:CAN協(xié)議具有極高的實時性,能夠在微秒級別內(nèi)完成數(shù)據(jù)傳輸,適用于需要快速響應(yīng)的控制應(yīng)用。
可靠性:通過差分信號傳輸和錯誤檢測機制(如CRC校驗),CAN協(xié)議能夠確保數(shù)據(jù)傳輸?shù)母叨瓤煽啃裕词乖趷毫拥碾姶怒h(huán)境中也能有效運行。
抗干擾能力強:CAN協(xié)議采用差分信號傳輸,使其對電磁干擾具有良好的抵抗能力,適合車輛這種復(fù)雜電磁環(huán)境下的應(yīng)用。
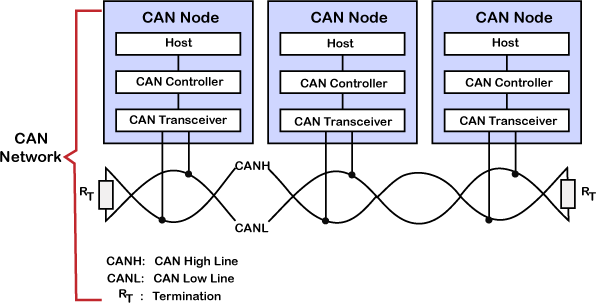
多節(jié)點:CAN網(wǎng)絡(luò)支持多達(dá)數(shù)百個節(jié)點的連接,可以同時進(jìn)行多個設(shè)備之間的通信,例如發(fā)動機控制、空調(diào)系統(tǒng)、車載娛樂系統(tǒng)等。
低成本:CAN協(xié)議的實現(xiàn)成本相對較低,硬件和軟件開發(fā)都相對簡單,這使得它成為了汽車行業(yè)普遍采用的標(biāo)準(zhǔn)之一。
歷史發(fā)展:
1983年:Bosch公司首次提出CAN協(xié)議,用于解決當(dāng)時汽車電子系統(tǒng)中的通信需求,以取代傳統(tǒng)的串行通信方式。
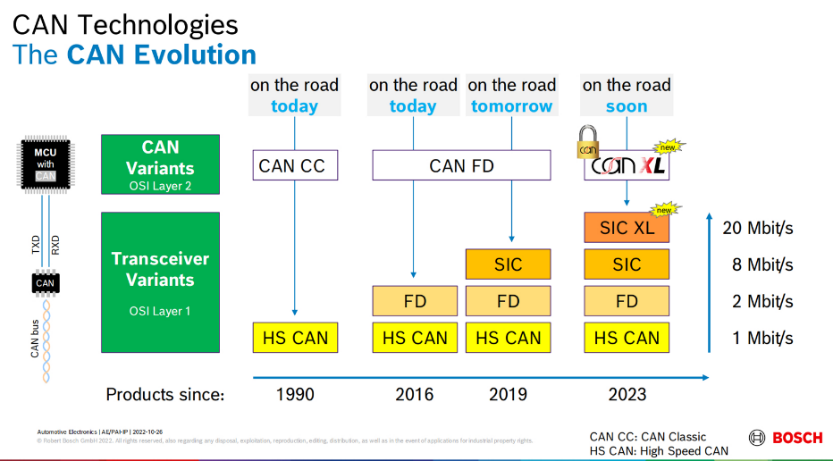
1991年:CAN協(xié)議的第一個國際標(biāo)準(zhǔn)ISO 11898發(fā)布,確立了CAN的物理層和數(shù)據(jù)鏈路層的標(biāo)準(zhǔn)化規(guī)范,促進(jìn)了CAN在全球的廣泛應(yīng)用。
1993年:發(fā)布了CAN協(xié)議的第一個擴(kuò)展版本,主要增加了對更高數(shù)據(jù)傳輸速率的支持,為日后CAN FD的發(fā)展奠定了基礎(chǔ)。
2007年:CAN FD(Flexible Data-Rate,靈活數(shù)據(jù)率)協(xié)議開始在汽車行業(yè)引入,允許更高的數(shù)據(jù)傳輸速率和更大的數(shù)據(jù)幀,以適應(yīng)現(xiàn)代汽車系統(tǒng)對數(shù)據(jù)量和速率的增加需求。
總結(jié)而言,CAN協(xié)議由于其高度的實時性、可靠性和適應(yīng)性,成為了汽車電子控制系統(tǒng)中不可或缺的通信技術(shù)之一。隨著技術(shù)的進(jìn)步和汽車功能的增加,CAN協(xié)議不斷演進(jìn)和優(yōu)化,以滿足日益復(fù)雜的汽車電子系統(tǒng)對通信性能的需求。
在汽車電子系統(tǒng)中,CAN(Controller Area Network,控制器局域網(wǎng)絡(luò))協(xié)議有兩種主要變體:高速CAN(High-Speed CAN)和低速CAN(Low-Speed CAN),它們適用于不同的應(yīng)用場景,具有不同的性能特點和技術(shù)指標(biāo)。
2.2、High-Speed CAN
特點和應(yīng)用:
數(shù)據(jù)傳輸速率:高速CAN的傳輸速率最高可以達(dá)到1 Mbps(百萬比特每秒)。
數(shù)據(jù)負(fù)載:每幀最多8字節(jié)的數(shù)據(jù)。
應(yīng)用場景:
高速CAN主要用于需要快速、實時數(shù)據(jù)交換的系統(tǒng),如發(fā)動機控制單元(ECU)、防抱死制動系統(tǒng)(ABS)和其他動力總成及安全系統(tǒng)。
適合于實時性要求較高的應(yīng)用,確保數(shù)據(jù)在極短時間內(nèi)傳輸和處理。
技術(shù)細(xì)節(jié):
拓?fù)浣Y(jié)構(gòu):通常采用總線拓?fù)洌泄?jié)點并聯(lián)在一條總線上。
物理層:使用差分信號傳輸,具有較強的抗電磁干擾能力。
線纜長度:隨著傳輸速率的提高,允許的線纜長度會相應(yīng)減少。例如,1 Mbps時,最大線纜長度大約為40米。
2.3、Low-Speed CAN(或Fault-Tolerant CAN)
特點和應(yīng)用:
數(shù)據(jù)傳輸速率:低速CAN的傳輸速率通常為125 Kbps或以下。
數(shù)據(jù)負(fù)載:每幀最多8字節(jié)的數(shù)據(jù)。
3. 應(yīng)用場景:
低速CAN適用于對傳輸速率要求不高的車身控制系統(tǒng),如電動窗、座椅調(diào)節(jié)、空調(diào)系統(tǒng)和車門控制等。
適合于不需要高速數(shù)據(jù)傳輸?shù)姆顷P(guān)鍵系統(tǒng),提供一種經(jīng)濟(jì)高效的通信解決方案。
技術(shù)細(xì)節(jié):
拓?fù)浣Y(jié)構(gòu):也采用總線拓?fù)洌哂泄收先萑棠芰Γ‵ault-Tolerant),即使總線上的某些節(jié)點或線路出現(xiàn)故障,系統(tǒng)仍能繼續(xù)運行。
物理層:允許單線模式運行,在總線一條線出現(xiàn)故障時,仍能通過另一條線傳輸數(shù)據(jù)。
線纜長度:低速CAN允許更長的線纜長度,在125 Kbps時,最大線纜長度可以達(dá)到500米。
| 指標(biāo) | 高速CAN | 低速CAN |
| 數(shù)據(jù)傳輸速率 | 最高1 Mbps | 通常125 Kbps或以下 |
| 數(shù)據(jù)負(fù)載 | 每幀最多8字節(jié) | 每幀最多8字節(jié) |
| 應(yīng)用場景 | 發(fā)動機控制單元(ECU)、ABS、動力總成及安全系統(tǒng) | 電動窗、座椅調(diào)節(jié)、空調(diào)系統(tǒng)、車門控制等 |
| 抗干擾能力 | 較強(差分信號傳輸) | 較強(差分信號傳輸,單線模式故障容忍) |
| 線纜長度 | 1 Mbps時,最大40米 | 125 Kbps時,最大500米 |
| 拓?fù)浣Y(jié)構(gòu) | 總線拓?fù)?/td> | 總線拓?fù)洌ň哂泄收先萑棠芰Γ?/td> |
2.4、未來發(fā)展趨勢
隨著汽車電子系統(tǒng)的不斷發(fā)展,高速CAN和低速CAN在各自領(lǐng)域中將繼續(xù)發(fā)揮重要作用,但也面臨著新的挑戰(zhàn)和機遇:
高速CAN:未來可能會被更高速的通信協(xié)議(如CAN FD和CAN XL)部分取代或補充,以滿足更高數(shù)據(jù)速率和更大數(shù)據(jù)負(fù)載的需求。
低速CAN:將繼續(xù)在低數(shù)據(jù)速率應(yīng)用中保持重要地位,但可能需要進(jìn)一步提升故障容忍能力和安全性能,以應(yīng)對更加復(fù)雜的車身控制需求。
綜上所述,高速CAN和低速CAN各有其特點和應(yīng)用場景,在汽車電子系統(tǒng)中起著關(guān)鍵作用。選擇適合的通信協(xié)議能夠有效優(yōu)化系統(tǒng)性能和成本,并為未來的智能化、網(wǎng)聯(lián)化和自動化發(fā)展奠定堅實基礎(chǔ)。
2.5、CAN在汽車中的具體應(yīng)用
CAN在現(xiàn)代汽車中的具體應(yīng)用非常廣泛,涵蓋了幾乎所有的關(guān)鍵系統(tǒng)和功能模塊。
以下是CAN在汽車中的更詳細(xì)的具體應(yīng)用:
發(fā)動機控制單元(ECU):CAN協(xié)議在發(fā)動機控制方面起到了至關(guān)重要的作用。發(fā)動機控制單元通過CAN總線與其他系統(tǒng)和傳感器進(jìn)行通信,監(jiān)控和控制發(fā)動機的各種參數(shù),例如轉(zhuǎn)速、溫度、氣壓和油耗等。這些數(shù)據(jù)不僅用于優(yōu)化發(fā)動機的性能和燃油效率,還用于確保發(fā)動機的運行安全和可靠性。CAN的快速響應(yīng)能力使得發(fā)動機控制單元能夠?qū)崟r調(diào)整引擎操作以適應(yīng)不同的駕駛條件和車輛負(fù)載。
變速器控制:自動變速器系統(tǒng)也依賴于CAN協(xié)議進(jìn)行數(shù)據(jù)交換和控制。變速器控制單元通過CAN總線接收來自發(fā)動機、車速傳感器和駕駛員輸入的數(shù)據(jù),以精確地調(diào)整變速箱的換擋時機和方式。這種實時的數(shù)據(jù)傳輸和控制能力確保了變速器在各種駕駛條件下的平穩(wěn)性和高效性。
車身電子系統(tǒng):CAN協(xié)議在車身電子系統(tǒng)中的應(yīng)用涉及多個功能模塊,如車窗控制、電動門鎖、空調(diào)控制、燈光管理等。這些系統(tǒng)使用CAN總線進(jìn)行內(nèi)部和外部設(shè)備的數(shù)據(jù)交換,使得駕駛員和乘客能夠通過中央控制單元或者直接操作單元來控制車輛的各種功能。例如,通過CAN總線,車窗控制模塊可以接收來自駕駛員和乘客的操作指令,并確保窗戶的快速和準(zhǔn)確地開閉動作。
制動系統(tǒng)和安全功能:現(xiàn)代汽車的防抱死制動系統(tǒng)(ABS)、電子穩(wěn)定程序(ESP)、牽引力控制系統(tǒng)(TCS)等安全功能也依賴于CAN協(xié)議進(jìn)行實時數(shù)據(jù)傳輸和操作指令的交換。這些系統(tǒng)通過CAN總線與車輛的各個部件和傳感器連接,確保在緊急情況下能夠快速而準(zhǔn)確地響應(yīng),提高車輛的操控性和安全性。
信息娛樂和導(dǎo)航系統(tǒng):車載信息娛樂系統(tǒng)和導(dǎo)航系統(tǒng)也使用CAN總線與其他系統(tǒng)進(jìn)行數(shù)據(jù)交換。例如,音頻系統(tǒng)可以通過CAN總線接收來自用戶的控制指令,并與車輛其他部件協(xié)調(diào)工作,以提供高質(zhì)量的音頻體驗和導(dǎo)航服務(wù)。
總的來說,CAN協(xié)議作為汽車電子系統(tǒng)中最基礎(chǔ)和核心的通信技術(shù)之一,為各種系統(tǒng)和功能模塊之間的高效協(xié)作提供了必要的平臺。它的實時性、可靠性和適應(yīng)性使得現(xiàn)代汽車能夠在不同的駕駛和使用條件下保持高效和安全的運行狀態(tài)。
2.6、CAN協(xié)議的優(yōu)勢與限制
優(yōu)勢:
高可靠性:CAN協(xié)議通過差分信號傳輸和錯誤檢測機制(如CRC校驗)確保了數(shù)據(jù)傳輸?shù)母叨瓤煽啃浴K軌驒z測并糾正錯誤幀,或者在發(fā)現(xiàn)無法糾正的錯誤時放棄傳輸,從而有效地減少了數(shù)據(jù)傳輸中的錯誤率。
實時性:CAN協(xié)議設(shè)計初衷就是為了應(yīng)對實時控制要求,能夠在微秒級別內(nèi)完成數(shù)據(jù)的傳輸。這種快速響應(yīng)能力使得CAN協(xié)議非常適合需要及時反饋和控制的應(yīng)用,如發(fā)動機控制、制動系統(tǒng)和安全系統(tǒng)等。
多主控制:CAN總線支持多主控制結(jié)構(gòu),允許多個節(jié)點同時發(fā)送數(shù)據(jù),而無需中心節(jié)點的調(diào)度。這種分布式控制結(jié)構(gòu)使得CAN協(xié)議在大型汽車系統(tǒng)中能夠有效地管理和協(xié)調(diào)各個子系統(tǒng)和傳感器。
抗干擾能力強:CAN協(xié)議采用差分信號傳輸,使其對電磁干擾有很好的抵抗能力。這使得CAN總線能夠在車輛的復(fù)雜電磁環(huán)境中穩(wěn)定運行,不受外界干擾影響數(shù)據(jù)傳輸?shù)目煽啃浴?/p>
限制:
數(shù)據(jù)速率較低:傳統(tǒng)的CAN協(xié)議的數(shù)據(jù)傳輸速率通常限制在1 Mbps。盡管這在許多控制應(yīng)用中是足夠的,但對于需要處理大量數(shù)據(jù)或高速傳輸?shù)膽?yīng)用(如高清視頻傳輸或大數(shù)據(jù)量傳感器),其帶寬可能顯得不足。
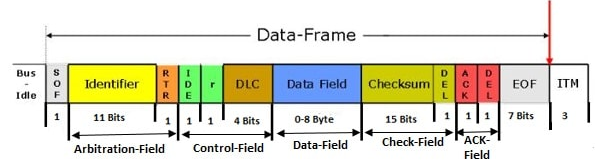
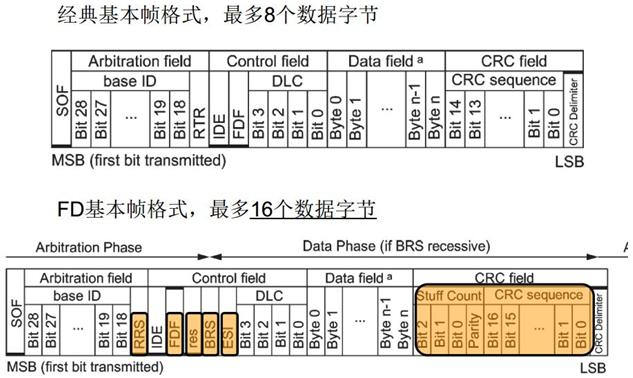
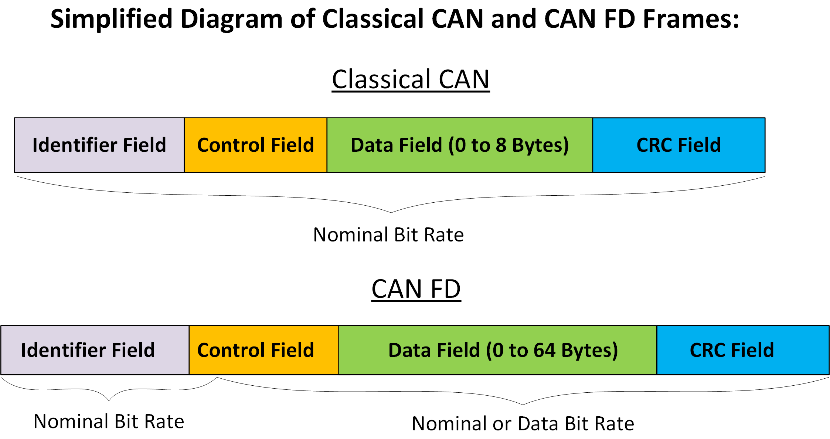
數(shù)據(jù)負(fù)載有限:CAN協(xié)議的數(shù)據(jù)幀大小受到限制,通常最大為8字節(jié)(經(jīng)典CAN)。這在某些情況下可能限制了數(shù)據(jù)的傳輸能力和靈活性,尤其是在需要傳輸大塊數(shù)據(jù)或者復(fù)雜數(shù)據(jù)結(jié)構(gòu)時可能顯得不夠。
網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)限制:CAN總線的物理拓?fù)浣Y(jié)構(gòu)通常是線性的總線結(jié)構(gòu),這種結(jié)構(gòu)限制了系統(tǒng)的擴(kuò)展性和靈活性。雖然可以通過網(wǎng)橋或者集線器來擴(kuò)展網(wǎng)絡(luò),但相比于更靈活的以太網(wǎng)結(jié)構(gòu),其拓?fù)浣Y(jié)構(gòu)的設(shè)計可能顯得有些受限。
2.7、性能指標(biāo)數(shù)值(以經(jīng)典CAN為例)
數(shù)據(jù)傳輸速率:通常為1 Mbps。
數(shù)據(jù)幀大小:最大為8字節(jié)。
最大節(jié)點數(shù)量:可支持多達(dá)數(shù)百個節(jié)點。
總體來說,盡管CAN協(xié)議在汽車電子系統(tǒng)中有其明顯的優(yōu)勢,但在面對現(xiàn)代汽車復(fù)雜的數(shù)據(jù)處理和傳輸需求時,也面臨一些限制,特別是在數(shù)據(jù)速率和數(shù)據(jù)負(fù)載方面。隨著技術(shù)的進(jìn)步,CAN FD和CAN XL等協(xié)議的出現(xiàn)已經(jīng)在一定程度上緩解了這些限制,為更高速率和更大數(shù)據(jù)量的應(yīng)用提供了更好的支持。
#03CAN FD協(xié)議及其汽車應(yīng)用
3.1、CAN FD簡介
發(fā)展背景:
CAN FD(CAN with Flexible Data Rate,靈活數(shù)據(jù)率)協(xié)議是對傳統(tǒng)CAN(Controller Area Network,控制器局域網(wǎng)絡(luò))協(xié)議的擴(kuò)展和優(yōu)化。傳統(tǒng)的CAN協(xié)議在數(shù)據(jù)傳輸速率上存在一定的限制(通常為1 Mbps),這在現(xiàn)代汽車電子系統(tǒng)中,特別是在處理大量傳感器數(shù)據(jù)和高帶寬需求時顯得不足。因此,CAN FD協(xié)議應(yīng)運而生,旨在提供更高的數(shù)據(jù)傳輸速率和更大的數(shù)據(jù)幀容量,以滿足現(xiàn)代汽車系統(tǒng)對數(shù)據(jù)量和速率的增加需求。
特點:
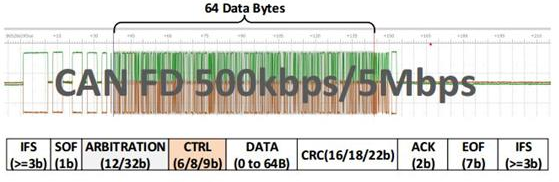
靈活的數(shù)據(jù)率:CAN FD協(xié)議允許在數(shù)據(jù)傳輸時動態(tài)調(diào)整數(shù)據(jù)速率。傳統(tǒng)CAN協(xié)議在固定的數(shù)據(jù)傳輸速率上限(通常為1 Mbps),而CAN FD可以根據(jù)需要提供更高的傳輸速率,例如可以達(dá)到5 Mbps甚至更高,這使得它更適合處理大量數(shù)據(jù)或者需要快速傳輸?shù)膽?yīng)用場景。
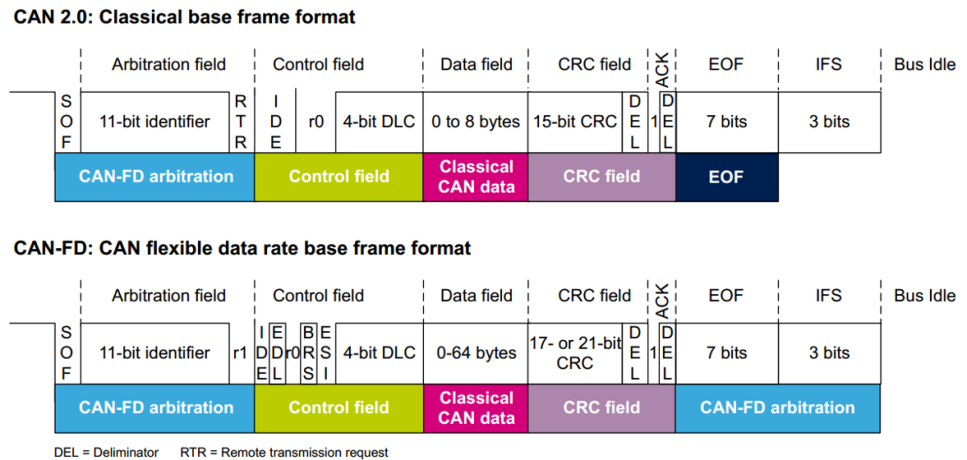
支持更大的數(shù)據(jù)幀:傳統(tǒng)CAN協(xié)議的數(shù)據(jù)幀大小有限(通常最大為8字節(jié)),而CAN FD協(xié)議支持更大的數(shù)據(jù)幀,可以達(dá)到64字節(jié)。這種增加了的數(shù)據(jù)幀大小使得CAN FD能夠更有效地傳輸大塊數(shù)據(jù)或者復(fù)雜數(shù)據(jù)結(jié)構(gòu),例如傳感器數(shù)據(jù)、圖像數(shù)據(jù)等。
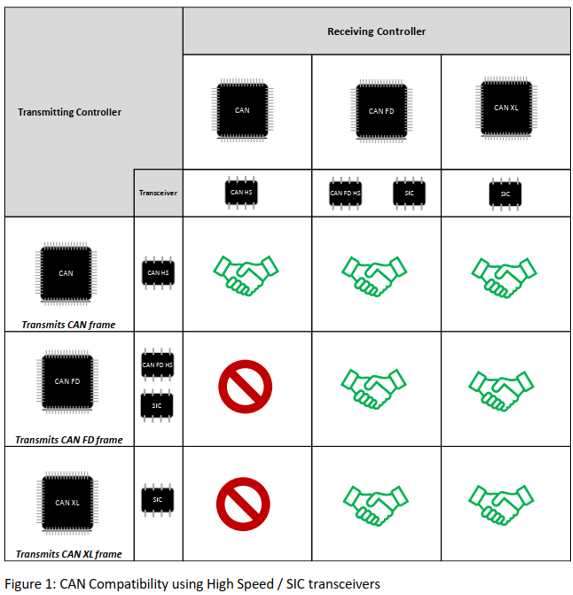
向后兼容性:CAN FD協(xié)議設(shè)計時考慮了向后兼容性,這意味著它可以與傳統(tǒng)的CAN協(xié)議在同一網(wǎng)絡(luò)中共存。這種兼容性使得汽車制造商可以逐步升級其現(xiàn)有的CAN網(wǎng)絡(luò),而不需要完全替換已有的硬件和設(shè)施。
保留了CAN的實時性和可靠性:盡管增加了數(shù)據(jù)傳輸速率和數(shù)據(jù)幀大小,CAN FD協(xié)議仍然保留了CAN協(xié)議的實時性和可靠性優(yōu)勢。它仍然能夠在微秒級別內(nèi)完成數(shù)據(jù)傳輸,適用于需要及時響應(yīng)和高度可靠性的控制應(yīng)用。
技術(shù)提升:
物理層優(yōu)化:CAN FD協(xié)議在物理層上做了一些優(yōu)化,以支持更高的數(shù)據(jù)傳輸速率。這些優(yōu)化包括使用更高的波特率和更精密的時鐘同步,以確保數(shù)據(jù)在傳輸過程中的穩(wěn)定性和準(zhǔn)確性。
數(shù)據(jù)鏈路層改進(jìn):為了支持更大的數(shù)據(jù)幀和靈活的數(shù)據(jù)傳輸速率,CAN FD協(xié)議在數(shù)據(jù)鏈路層上進(jìn)行了改進(jìn)。這些改進(jìn)包括數(shù)據(jù)幀格式的調(diào)整,以及對數(shù)據(jù)傳輸過程中的錯誤檢測和糾正機制的優(yōu)化,以確保數(shù)據(jù)傳輸?shù)母呖煽啃院屯暾浴?/p>
應(yīng)用擴(kuò)展性:CAN FD協(xié)議的引入極大地擴(kuò)展了CAN網(wǎng)絡(luò)的應(yīng)用范圍。它不僅適用于傳統(tǒng)的控制和監(jiān)測應(yīng)用,還能夠支持更復(fù)雜的數(shù)據(jù)交換需求,如高分辨率傳感器數(shù)據(jù)、視頻傳輸和高級駕駛輔助系統(tǒng)(ADAS)等。
總體來說,CAN FD協(xié)議通過提供靈活的數(shù)據(jù)傳輸速率和更大的數(shù)據(jù)幀容量,為現(xiàn)代汽車電子系統(tǒng)帶來了顯著的性能提升和應(yīng)用擴(kuò)展能力。它繼承了CAN協(xié)議的穩(wěn)定性和實時性優(yōu)勢,并針對現(xiàn)代汽車復(fù)雜的數(shù)據(jù)處理需求進(jìn)行了有效的技術(shù)優(yōu)化。
3.2、CAN FD在汽車中的具體應(yīng)用
1. 高級駕駛輔助系統(tǒng)(ADAS):
高級駕駛輔助系統(tǒng)(ADAS)依賴于精確的傳感器數(shù)據(jù)和快速的實時決策,以提升駕駛安全性和舒適性。CAN FD協(xié)議在這方面發(fā)揮了關(guān)鍵作用,特別是對于需要更高的數(shù)據(jù)速率和更大數(shù)據(jù)負(fù)載的應(yīng)用。
以下是CAN FD在ADAS中的具體應(yīng)用場景:
雷達(dá)系統(tǒng)和攝像頭傳感器:ADAS系統(tǒng)使用雷達(dá)和攝像頭等傳感器來感知車輛周圍的環(huán)境和道路條件。這些傳感器生成大量的高分辨率數(shù)據(jù),如距離、速度、障礙物檢測等信息,需要通過CAN FD協(xié)議高速傳輸?shù)街骺刂茊卧‥CU)進(jìn)行實時處理和決策。
自動緊急制動系統(tǒng)(AEB):AEB系統(tǒng)依賴于實時的傳感器數(shù)據(jù),以便在檢測到潛在碰撞危險時迅速采取緊急制動措施。CAN FD協(xié)議能夠有效地傳輸這些關(guān)鍵的數(shù)據(jù),確保系統(tǒng)能夠在最短時間內(nèi)做出反應(yīng),以減少碰撞風(fēng)險。
自動駕駛功能:高級的自動駕駛功能需要大量的傳感器數(shù)據(jù)來實現(xiàn)車輛的精確定位、環(huán)境感知和路徑規(guī)劃。CAN FD協(xié)議提供了足夠的帶寬和數(shù)據(jù)幀大小,使得這些復(fù)雜的數(shù)據(jù)可以快速而可靠地在整個車輛系統(tǒng)內(nèi)傳輸和處理。
2. 車輛聯(lián)網(wǎng):
隨著車輛聯(lián)網(wǎng)技術(shù)的發(fā)展,現(xiàn)代汽車能夠?qū)崿F(xiàn)與云服務(wù)、其他車輛和智能設(shè)備的實時數(shù)據(jù)交換和通信。CAN FD協(xié)議在車輛聯(lián)網(wǎng)中發(fā)揮了重要作用,支持以下應(yīng)用場景:
實時數(shù)據(jù)傳輸:車輛通過CAN FD協(xié)議可以與云端服務(wù)實現(xiàn)實時數(shù)據(jù)傳輸,如車輛位置、駕駛行為、車載媒體內(nèi)容等。這些數(shù)據(jù)對于車輛狀態(tài)監(jiān)控、遠(yuǎn)程車輛管理和智能交通管理具有重要意義。
車載診斷和遠(yuǎn)程服務(wù):CAN FD協(xié)議允許車輛系統(tǒng)通過互聯(lián)網(wǎng)連接進(jìn)行遠(yuǎn)程診斷和軟件更新。制造商和服務(wù)提供商可以通過遠(yuǎn)程訪問CAN FD網(wǎng)絡(luò),實時監(jiān)測車輛的健康狀態(tài)并提供維護(hù)服務(wù),從而降低維護(hù)成本并提升車輛的可靠性和安全性。
總體來說,CAN FD協(xié)議通過提供更高的數(shù)據(jù)傳輸速率、更大的數(shù)據(jù)幀容量和靈活的數(shù)據(jù)傳輸能力,為現(xiàn)代汽車的高級駕駛輔助系統(tǒng)和車輛聯(lián)網(wǎng)技術(shù)帶來了顯著的技術(shù)優(yōu)勢和應(yīng)用擴(kuò)展能力。這些優(yōu)勢使得CAN FD成為了越來越多汽車制造商在新車型中采用的首選通信協(xié)議之一。
3.3、CAN FD協(xié)議的優(yōu)勢與限制
優(yōu)勢:
更高的數(shù)據(jù)傳輸速率:CAN FD協(xié)議相比傳統(tǒng)CAN協(xié)議顯著提升了數(shù)據(jù)傳輸速率。傳統(tǒng)CAN協(xié)議的數(shù)據(jù)傳輸速率通常限制在1 Mbps,而CAN FD協(xié)議的最高傳輸速率可達(dá)8 Mbps,這使得它能夠更快速地處理大量數(shù)據(jù),適用于需要高帶寬的應(yīng)用場景。
更大的數(shù)據(jù)幀容量:CAN FD協(xié)議支持更大的數(shù)據(jù)幀大小,最大可達(dá)64字節(jié)(比傳統(tǒng)CAN的8字節(jié)要大得多)。這種增加的數(shù)據(jù)幀容量使得CAN FD能夠有效地傳輸大塊數(shù)據(jù)或者復(fù)雜數(shù)據(jù)結(jié)構(gòu),如高分辨率傳感器數(shù)據(jù)、圖像數(shù)據(jù)等,滿足了現(xiàn)代汽車電子系統(tǒng)對更大數(shù)據(jù)負(fù)載的需求。
實時性和可靠性保持:盡管提升了數(shù)據(jù)傳輸速率和數(shù)據(jù)幀大小,CAN FD協(xié)議仍然保持了CAN協(xié)議的實時性和可靠性優(yōu)勢。它能夠在微秒級別內(nèi)完成數(shù)據(jù)傳輸,適用于需要及時響應(yīng)和高度可靠性的控制和監(jiān)測應(yīng)用。
向后兼容性:CAN FD協(xié)議設(shè)計時考慮了向后兼容性,這意味著它可以與傳統(tǒng)的CAN協(xié)議在同一網(wǎng)絡(luò)中共存。這種兼容性使得汽車制造商可以逐步升級其現(xiàn)有的CAN網(wǎng)絡(luò),而不需要完全替換已有的硬件和設(shè)施,節(jié)約了成本和時間。
限制:
對硬件要求更高:盡管CAN FD協(xié)議帶來了更高的性能和數(shù)據(jù)傳輸速率,但它也對硬件的要求更高。為了支持更高的數(shù)據(jù)傳輸速率,CAN FD網(wǎng)絡(luò)需要更先進(jìn)的控制器和傳輸介質(zhì),這可能會增加系統(tǒng)的成本和復(fù)雜性。
兼容性問題:盡管CAN FD協(xié)議具有向后兼容性,但與傳統(tǒng)CAN設(shè)備的兼容性問題仍可能存在。特別是在早期采用傳統(tǒng)CAN協(xié)議的車輛和設(shè)備中,可能需要額外的軟件或硬件適配器來確保CAN FD協(xié)議的正常運行和兼容性。從經(jīng)典CAN升級到CAN FD需要更換CAN收發(fā)器和CAN控制器。具體來說,收發(fā)器需要從支持最高1 Mbps的速率升級到支持最高5 Mbps或更高的速率。控制器需要完全支持CAN FD的鏈路層協(xié)議。如果CAN控制器集成在微控制器(MCU)內(nèi),則需要更換整個MCU以確保兼容性。這些硬件更換確保系統(tǒng)能夠滿足更高數(shù)據(jù)速率和更大數(shù)據(jù)幀的需求,從而提高汽車電子系統(tǒng)的性能和可靠性。
3.4、性能指標(biāo)數(shù)值
最高數(shù)據(jù)傳輸速率:可達(dá)8 Mbps(傳統(tǒng)CAN通常為1 Mbps)。
最大數(shù)據(jù)幀大小:支持最多64字節(jié)的數(shù)據(jù)幀(傳統(tǒng)CAN通常為8字節(jié))。
總體而言,CAN FD協(xié)議通過提供更高的數(shù)據(jù)傳輸速率和更大的數(shù)據(jù)幀容量,顯著增強了現(xiàn)代汽車電子系統(tǒng)的數(shù)據(jù)處理能力和應(yīng)用靈活性。盡管存在一些硬件要求和兼容性問題,但其優(yōu)勢遠(yuǎn)大于限制,使得它成為了越來越多汽車制造商和系統(tǒng)集成商在新車型中選擇的通信協(xié)議。
#04CAN XL協(xié)議及其汽車應(yīng)用
4.1、CAN XL簡介
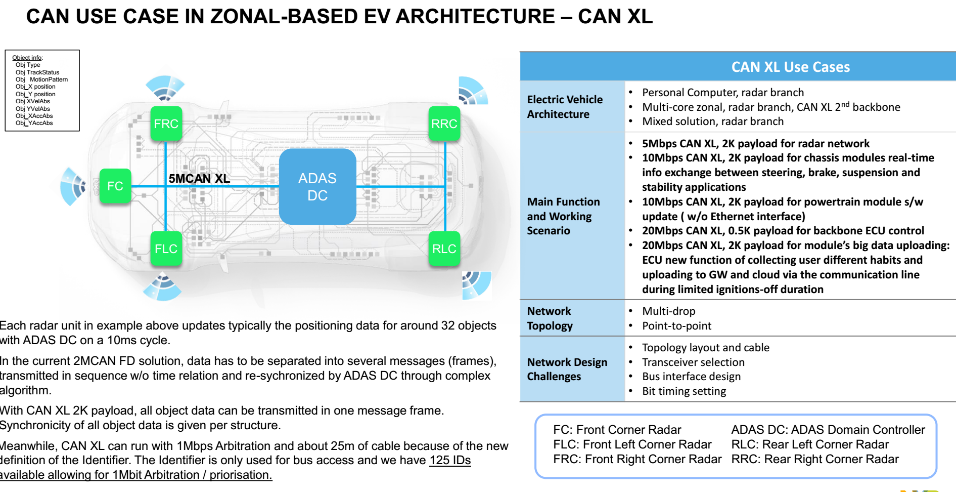
CAN XL協(xié)議(也稱為Controller Area Network eXtended Length)是對CAN FD協(xié)議的進(jìn)一步擴(kuò)展和優(yōu)化,旨在進(jìn)一步提升數(shù)據(jù)傳輸速率、增加數(shù)據(jù)幀大小,并提供更強的錯誤處理能力。CAN XL協(xié)議的發(fā)展主要是為了應(yīng)對現(xiàn)代汽車電子系統(tǒng)中日益增長的數(shù)據(jù)量和復(fù)雜性需求。
最新進(jìn)展和技術(shù)特點:
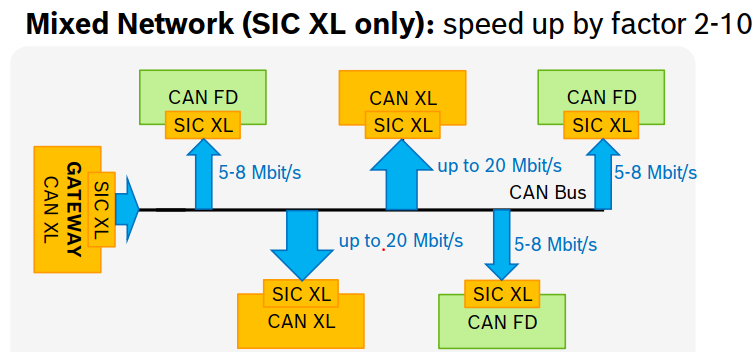
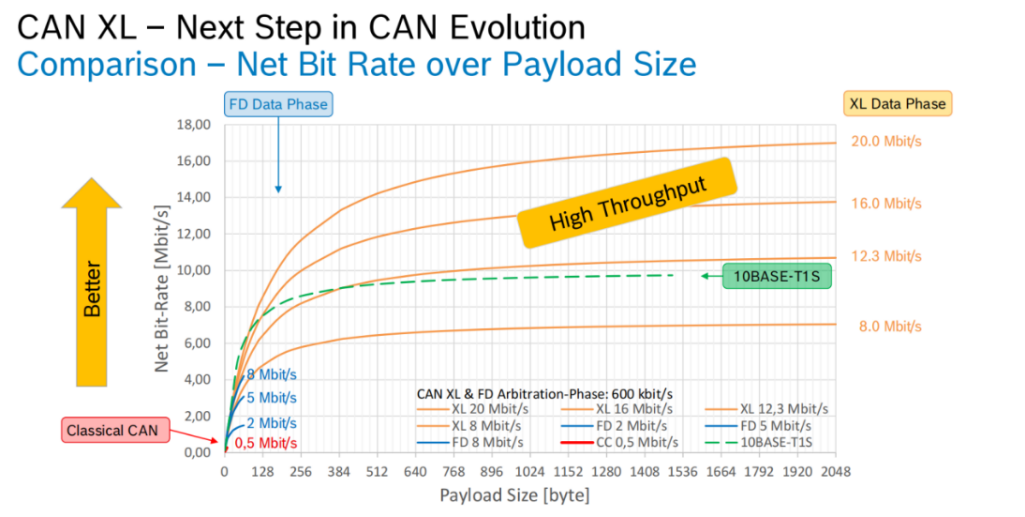
更高的數(shù)據(jù)傳輸速率:CAN XL協(xié)議相比CAN FD進(jìn)一步提升了數(shù)據(jù)傳輸速率。盡管具體的標(biāo)準(zhǔn)和實現(xiàn)可能有所不同,但通常CAN XL可以支持更高達(dá)20 Mbps甚至更高的傳輸速率。這種高速率使得CAN XL在處理大量傳感器數(shù)據(jù)和高帶寬需求的應(yīng)用中更為有效。
更大的數(shù)據(jù)幀容量:類似于CAN FD,CAN XL協(xié)議支持更大的數(shù)據(jù)幀。它能夠處理比CAN FD更大的數(shù)據(jù)幀,這使得它更適合傳輸更復(fù)雜的數(shù)據(jù)結(jié)構(gòu),如高分辨率傳感器數(shù)據(jù)、視頻流等。

強化的錯誤處理能力:CAN XL協(xié)議在錯誤處理方面進(jìn)行了進(jìn)一步的增強。它引入了更復(fù)雜的錯誤檢測和糾正機制,能夠在數(shù)據(jù)傳輸中更有效地識別和處理錯誤,提升了系統(tǒng)的可靠性和穩(wěn)定性。
低功耗設(shè)計:為了適應(yīng)現(xiàn)代汽車對節(jié)能環(huán)保的需求,CAN XL協(xié)議在設(shè)計時考慮了低功耗特性。它能夠在提供高性能的同時,有效管理能耗,符合新一代汽車電子系統(tǒng)對節(jié)能和環(huán)保的要求。
適用于復(fù)雜系統(tǒng)集成:CAN XL不僅僅局限于車輛內(nèi)部的控制和監(jiān)測應(yīng)用,它還可以支持復(fù)雜的車輛網(wǎng)絡(luò)和系統(tǒng)集成,如車輛到車輛(V2V)通信、車輛到基礎(chǔ)設(shè)施(V2I)通信等高級應(yīng)用場景。
向后兼容性和適應(yīng)性:類似于CAN FD,CAN XL協(xié)議設(shè)計時考慮了向后兼容性,這使得它可以逐步替代現(xiàn)有的CAN和CAN FD網(wǎng)絡(luò),并與已有設(shè)備和系統(tǒng)兼容,從而實現(xiàn)平穩(wěn)過渡和更新。
總體而言,CAN XL協(xié)議的出現(xiàn)進(jìn)一步推動了汽車電子系統(tǒng)通信協(xié)議的發(fā)展,提供了更高的性能和更廣泛的應(yīng)用能力,以滿足現(xiàn)代汽車對數(shù)據(jù)傳輸速率、數(shù)據(jù)幀大小和系統(tǒng)可靠性的高要求。隨著技術(shù)的不斷進(jìn)步和市場的廣泛應(yīng)用,CAN XL協(xié)議有望成為未來新一代汽車電子系統(tǒng)中的主流通信標(biāo)準(zhǔn)之一。
4.2、CAN XL在汽車中的具體應(yīng)用
1. 自動駕駛系統(tǒng):
自動駕駛系統(tǒng)是現(xiàn)代汽車技術(shù)的前沿領(lǐng)域,對數(shù)據(jù)傳輸速率和數(shù)據(jù)負(fù)載有極高的要求。CAN XL協(xié)議在這方面提供了理想的解決方案,支持超高數(shù)據(jù)速率和大數(shù)據(jù)負(fù)載,從而滿足復(fù)雜的自動駕駛系統(tǒng)的需求:
傳感器數(shù)據(jù)處理:自動駕駛系統(tǒng)依賴于多種傳感器,如雷達(dá)、激光雷達(dá)、攝像頭等,來感知車輛周圍的環(huán)境和道路狀況。這些傳感器生成大量的高分辨率數(shù)據(jù),需要通過高速數(shù)據(jù)傳輸進(jìn)行實時處理和分析。CAN XL協(xié)議提供的高達(dá)20 Mbps或更高的數(shù)據(jù)傳輸速率,使得傳感器數(shù)據(jù)可以快速而可靠地傳輸?shù)杰囕v的主控制單元(ECU),以支持復(fù)雜的環(huán)境感知和決策系統(tǒng)。
高精度定位和地圖更新:自動駕駛系統(tǒng)需要高精度的定位和實時地圖數(shù)據(jù)更新,以便實現(xiàn)精確的路徑規(guī)劃和車輛控制。CAN XL協(xié)議的大數(shù)據(jù)幀能力允許高分辨率的地圖和定位數(shù)據(jù)在車輛內(nèi)部系統(tǒng)之間進(jìn)行快速傳輸和更新,確保駕駛系統(tǒng)始終基于最新和精確的地理信息。
實時決策和控制:自動駕駛系統(tǒng)要求系統(tǒng)能夠在毫秒級別內(nèi)做出實時決策和控制,以應(yīng)對突發(fā)情況和變化的交通環(huán)境。CAN XL協(xié)議保證了數(shù)據(jù)傳輸?shù)牡脱舆t和高可靠性,為自動駕駛系統(tǒng)提供了必要的實時性能。
2. 車內(nèi)娛樂系統(tǒng):
現(xiàn)代汽車的車內(nèi)娛樂系統(tǒng)越來越依賴于高帶寬的音視頻傳輸,以提供乘客優(yōu)質(zhì)的娛樂體驗。
CAN XL協(xié)議在這方面提供了適合高帶寬需求的解決方案:
高清音頻傳輸:車載娛樂系統(tǒng)需要支持高質(zhì)量的音頻流傳輸,如高清音樂和語音識別。CAN XL協(xié)議的高速數(shù)據(jù)傳輸能力可以確保音頻數(shù)據(jù)在車輛內(nèi)部各個娛樂設(shè)備之間的快速傳輸,從而提供清晰、無延遲的音頻體驗。
高清視頻傳輸:現(xiàn)代車載娛樂系統(tǒng)通常還包括后座娛樂屏幕或者車內(nèi)顯示屏,用于播放高清視頻內(nèi)容。CAN XL協(xié)議的大數(shù)據(jù)幀容量和高速傳輸速率能夠支持高分辨率視頻的流暢播放和快速傳輸,確保乘客享受到高品質(zhì)的視頻娛樂體驗。
游戲和互聯(lián)功能:車載娛樂系統(tǒng)還可能包括游戲和互聯(lián)網(wǎng)功能,需要處理復(fù)雜的數(shù)據(jù)流和實時交互。CAN XL協(xié)議的高帶寬和數(shù)據(jù)處理能力使得這些功能在車內(nèi)系統(tǒng)之間能夠穩(wěn)定運行,同時保持良好的用戶體驗。
總結(jié)來說,CAN XL協(xié)議在汽車領(lǐng)域的廣泛應(yīng)用不僅限于自動駕駛系統(tǒng)的高速數(shù)據(jù)傳輸需求,還擴(kuò)展到車內(nèi)娛樂系統(tǒng)等需要處理大量數(shù)據(jù)和高帶寬的應(yīng)用場景。其提供的高速率、大數(shù)據(jù)幀和低延遲的特性,使得CAN XL成為現(xiàn)代汽車電子系統(tǒng)中的重要通信協(xié)議之一。
4.3、CAN XL協(xié)議的優(yōu)勢與限制
優(yōu)勢:
更高的數(shù)據(jù)傳輸速率:CAN XL協(xié)議旨在進(jìn)一步提升數(shù)據(jù)傳輸速率,目標(biāo)是達(dá)到甚至超過10 Mbps。這種高速傳輸能力使得CAN XL適用于處理大量實時數(shù)據(jù),如高分辨率傳感器數(shù)據(jù)和復(fù)雜的控制信息。
更大的數(shù)據(jù)幀容量:CAN XL協(xié)議支持更大的數(shù)據(jù)幀,最大可以達(dá)到2048字節(jié)。相比CAN FD的64字節(jié)數(shù)據(jù)幀上限,CAN XL的更大數(shù)據(jù)幀容量使得它能夠有效處理更復(fù)雜的數(shù)據(jù)結(jié)構(gòu)和大塊數(shù)據(jù)傳輸,如高分辨率圖像和視頻流。
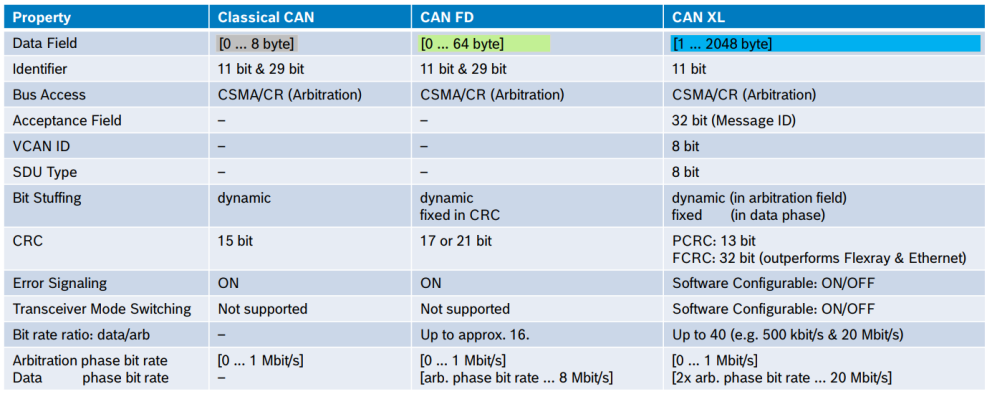
向下兼容性:類似于CAN FD,CAN XL協(xié)議設(shè)計時考慮了向下兼容性,這意味著它可以與現(xiàn)有的CAN和CAN FD設(shè)備和網(wǎng)絡(luò)兼容。這種兼容性使得CAN XL能夠平穩(wěn)地與現(xiàn)有的汽車電子系統(tǒng)集成,而無需全面更換硬件和設(shè)施。
適應(yīng)復(fù)雜系統(tǒng)集成:CAN XL協(xié)議不僅僅適用于車輛內(nèi)部的控制和監(jiān)測應(yīng)用,還能夠支持更復(fù)雜的系統(tǒng)集成,如車輛到車輛(V2V)通信、車輛到基礎(chǔ)設(shè)施(V2I)通信等高級應(yīng)用場景。其高速率和大數(shù)據(jù)幀容量使得它在這些復(fù)雜網(wǎng)絡(luò)環(huán)境中表現(xiàn)出色。
限制:
發(fā)展中的技術(shù):盡管CAN XL協(xié)議有著明顯的技術(shù)優(yōu)勢和市場前景,但目前仍處于發(fā)展和標(biāo)準(zhǔn)化階段。實際的量產(chǎn)和普及化尚需時間,需要等待更多汽車制造商和供應(yīng)商的采用和實施。
成本和復(fù)雜性:實現(xiàn)更高的數(shù)據(jù)傳輸速率和更大的數(shù)據(jù)幀容量可能需要更先進(jìn)的硬件和控制器,這可能會增加系統(tǒng)的成本和復(fù)雜性。特別是在現(xiàn)有的CAN和CAN FD網(wǎng)絡(luò)之上實施CAN XL協(xié)議時,需要考慮硬件和軟件的升級成本。
市場適應(yīng)性和標(biāo)準(zhǔn)化:盡管CAN XL協(xié)議有望成為未來汽車電子系統(tǒng)的主流通信標(biāo)準(zhǔn)之一,但其市場適應(yīng)性和標(biāo)準(zhǔn)化仍面臨一些挑戰(zhàn)。汽車行業(yè)需要共同努力來推動CAN XL協(xié)議的標(biāo)準(zhǔn)化進(jìn)程,并確保其能夠滿足全球汽車制造商和供應(yīng)商的需求。
4.4、性能指標(biāo)數(shù)值
目標(biāo)數(shù)據(jù)傳輸速率:高達(dá)10 Mbps或更高。
最大數(shù)據(jù)幀大小:支持最多2048字節(jié)的數(shù)據(jù)幀。
總體而言,CAN XL協(xié)議作為CAN FD的進(jìn)一步擴(kuò)展,為現(xiàn)代汽車電子系統(tǒng)帶來了顯著的技術(shù)優(yōu)勢和應(yīng)用擴(kuò)展能力。盡管其在發(fā)展中仍面臨一些挑戰(zhàn)和限制,但其高速率、大數(shù)據(jù)幀和向下兼容性的特性使得它成為未來汽車通信協(xié)議中的重要發(fā)展方向之一。
#05以太網(wǎng)協(xié)議及其汽車應(yīng)用
5.1、以太網(wǎng)簡介
基本概念:
以太網(wǎng)(Ethernet)是一種計算機網(wǎng)絡(luò)技術(shù),最初用于局域網(wǎng)(LAN)中,后來擴(kuò)展到廣域網(wǎng)(WAN)和城域網(wǎng)(MAN)。它是一種基于幀的數(shù)據(jù)通信協(xié)議,使用CSMA/CD(Carrier Sense Multiple Access with Collision Detection,載波監(jiān)聽多點訪問/碰撞檢測)技術(shù),能夠提供高速的數(shù)據(jù)傳輸和可靠的連接。
發(fā)展歷史:
誕生和發(fā)展:以太網(wǎng)最早由美國Xerox公司在1970年代末開發(fā),用于連接公司內(nèi)部的計算機和打印機,稱為Xerox Ethernet。后來,由于其簡單易用和可靠性,以及IEEE 802.3標(biāo)準(zhǔn)化的推廣,以太網(wǎng)迅速成為主流的局域網(wǎng)技術(shù)。
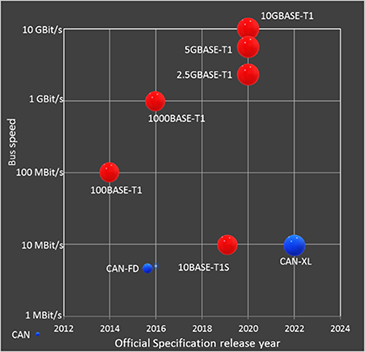
標(biāo)準(zhǔn)化和演變:1983年,IEEE開始制定802.3系列標(biāo)準(zhǔn),以太網(wǎng)協(xié)議得到了更廣泛的標(biāo)準(zhǔn)化和應(yīng)用。隨著技術(shù)的進(jìn)步和需求的增長,以太網(wǎng)的速度從最初的10 Mbps(10BASE-T)發(fā)展到了100 Mbps(Fast Ethernet),1 Gbps(Gigabit Ethernet),甚至10 Gbps(10 Gigabit Ethernet)和更高速率的版本。
技術(shù)特點:
數(shù)據(jù)傳輸速率:以太網(wǎng)支持多種數(shù)據(jù)傳輸速率,從最低的10 Mbps到最高可達(dá)數(shù)10Gbps,隨著技術(shù)的進(jìn)步和硬件的改進(jìn),速率不斷提升,以滿足不同應(yīng)用的需求。
幀結(jié)構(gòu):數(shù)據(jù)在以太網(wǎng)中以幀(Frame)的形式傳輸。每個以太網(wǎng)幀包括目標(biāo)地址、源地址、數(shù)據(jù)字段和校驗字段等。幀的大小通常在64字節(jié)至1518字節(jié)之間,但支持更大幀的版本也在逐漸推出,以提高數(shù)據(jù)傳輸效率。
碰撞檢測技術(shù):CSMA/CD技術(shù)是以太網(wǎng)中用于多點訪問的一種策略。它允許多個設(shè)備在同一物理介質(zhì)上傳輸數(shù)據(jù),并且能夠檢測和處理碰撞,以確保數(shù)據(jù)的完整性和可靠性。
靈活性和擴(kuò)展性:以太網(wǎng)具有良好的靈活性和擴(kuò)展性,能夠支持不同的拓?fù)浣Y(jié)構(gòu)(如星型、總線型、環(huán)形等)和介質(zhì)(如雙絞線、光纖),以適應(yīng)不同規(guī)模和需求的網(wǎng)絡(luò)。
廣泛應(yīng)用:除了傳統(tǒng)的辦公室局域網(wǎng),以太網(wǎng)還被廣泛應(yīng)用于數(shù)據(jù)中心網(wǎng)絡(luò)、云計算環(huán)境、工業(yè)控制系統(tǒng)以及近年來的汽車領(lǐng)域。
總體而言,以太網(wǎng)作為一種高速、靈活和可靠的網(wǎng)絡(luò)技術(shù),正在成為現(xiàn)代汽車電子系統(tǒng)中不可或缺的一部分。隨著汽車網(wǎng)絡(luò)的進(jìn)一步演進(jìn)和技術(shù)的不斷創(chuàng)新,以太網(wǎng)在汽車行業(yè)的應(yīng)用前景將會繼續(xù)擴(kuò)展和深化。
5.2、以太網(wǎng)在汽車中的具體應(yīng)用
1. 車載以太網(wǎng):
車載以太網(wǎng)技術(shù)是為了滿足現(xiàn)代汽車復(fù)雜電子系統(tǒng)對高速數(shù)據(jù)傳輸和大數(shù)據(jù)量處理需求而引入的。它在各種應(yīng)用中發(fā)揮著重要作用:
高級駕駛輔助系統(tǒng)(ADAS):ADAS系統(tǒng)依賴于多種傳感器,如雷達(dá)、攝像頭和激光雷達(dá),來感知周圍環(huán)境并進(jìn)行實時決策。這些傳感器產(chǎn)生大量的高分辨率數(shù)據(jù),需要快速傳輸和處理。車載以太網(wǎng)能夠提供足夠的帶寬和低延遲,支持ADAS系統(tǒng)實時的環(huán)境感知和數(shù)據(jù)融合,從而增強駕駛員輔助功能和安全性能。
自動駕駛數(shù)據(jù)的高帶寬傳輸:高級自動駕駛系統(tǒng)需要處理大量的傳感器數(shù)據(jù),并進(jìn)行復(fù)雜的算法計算和決策。車載以太網(wǎng)通過其高速的數(shù)據(jù)傳輸能力,支持車輛內(nèi)部各個子系統(tǒng)之間的大規(guī)模數(shù)據(jù)交換,如車輛控制、路徑規(guī)劃和環(huán)境模型構(gòu)建,從而實現(xiàn)自動駕駛功能的可靠運行。
| 傳感器類型 | 數(shù)據(jù)比特率范圍 |
| 攝像頭 | 500-3500 Mbps |
| 激光雷達(dá) | 20-100 Mbps |
| 雷達(dá) | 0.1-5 Mbps |
| 超聲波 | 0.01 Mbps |
圖中提供的表格列出了不同類型傳感器的數(shù)據(jù)比特率范圍,這些數(shù)據(jù)比特率是指傳感器在傳輸數(shù)據(jù)時每秒傳輸?shù)谋忍財?shù)。比特率越高,傳感器能夠傳輸?shù)臄?shù)據(jù)量越大,通常意味著更高的分辨率或更復(fù)雜的數(shù)據(jù)處理能力。如果一個系統(tǒng)需要集成多個高分辨率攝像頭和激光雷達(dá),那么就需要一個高帶寬的網(wǎng)絡(luò),如汽車以太網(wǎng),來滿足這些傳感器的數(shù)據(jù)傳輸需求。
2. 信息娛樂系統(tǒng):
現(xiàn)代汽車的信息娛樂系統(tǒng)不僅包括音頻和視頻播放,還涉及到互聯(lián)功能和后座娛樂系統(tǒng),需要處理大量的多媒體數(shù)據(jù):
高帶寬的多媒體傳輸:以太網(wǎng)提供的高速數(shù)據(jù)傳輸能力支持高清視頻和高質(zhì)量音頻的流暢播放,以及復(fù)雜的互聯(lián)功能,如在線地圖更新、流媒體服務(wù)和遠(yuǎn)程互聯(lián)設(shè)備的連接。這些功能不僅提升了乘客的娛樂體驗,還增強了車輛的吸引力和市場競爭力。
圖中提供了汽車攝像頭速度需求的數(shù)據(jù),展示了隨著分辨率從720p提高到4K,所需的原始帶寬以多千兆比特每秒(Multi-Gigabit/s)增加。同時,圖表還考慮了動態(tài)范圍的改善,即色深(bit)從8位到24位的變化,以及不同的分辨率(水平分辨率Hres和垂直分辨率Vres)和幀(Fps)。
表格中列出了不同分辨率和幀率下,不同色深所需的比特率,以及對應(yīng)的以太網(wǎng)速度等級(從100BASE-T1到Multi-Gig 10 Gbps)。以下是對圖中表格的輸出,包括分辨率、幀率、不同色深下的比特率,以及所需的以太網(wǎng)速度等級:
| 分辨率 | 幀率 | 8位色深比特率 | 12位色深比特率 | 16位色深比特率 | 20位色深比特率 | 24位色深比特率 | 以太網(wǎng)速度等級 |
| 1280x720 | 30 | 0.22 | 0.33 | 0.44 | 0.55 | 0.66 | 100BASE-T1 |
| 1280x720 | 60 | 0.44 | 0.66 | 0.88 | 1.11 | 1.33 | Multi-Gig 2.5 Gbps |
| 1920x1080 | 30 | 0.50 | 0.75 | 1.00 | 1.24 | 1.49 | Multi-Gig 5 Gbps |
| 1920x1080 | 60 | 1.00 | 1.49 | 1.99 | 2.49 | 2.99 | Multi-Gig 10 Gbps |
| 3840x2160 | 30 | 1.99 | 2.99 | 3.98 | 4.98 | 5.97 | - |
| 3840x2160 | 60 | 3.98 | 5.97 | 7.96 | 9.95 | 11.94 | - |
3. 車載診斷:
車載診斷系統(tǒng)是維護(hù)和管理現(xiàn)代汽車電子系統(tǒng)的重要工具,它需要高效的數(shù)據(jù)讀取和精準(zhǔn)的故障診斷:
高效的車輛數(shù)據(jù)讀取和診斷:以太網(wǎng)技術(shù)使得車輛的各種傳感器和控制單元能夠快速傳輸大量的診斷數(shù)據(jù)到診斷工具或者后臺服務(wù)器。這些數(shù)據(jù)可以包括引擎和排放系統(tǒng)的傳感器數(shù)據(jù)、電池管理系統(tǒng)的健康狀態(tài)、車輛通信總線的實時狀態(tài)等。通過高速的數(shù)據(jù)傳輸,診斷工程師能夠更加精準(zhǔn)地定位和解決車輛的故障,提高了維修效率和客戶滿意度。
總體來說,以太網(wǎng)技術(shù)作為一種高速、高效的數(shù)據(jù)通信協(xié)議,已經(jīng)成為現(xiàn)代汽車電子系統(tǒng)中不可或缺的一部分。它不僅支持復(fù)雜的駕駛輔助系統(tǒng)和自動駕駛功能的實現(xiàn),還提升了車輛信息娛樂系統(tǒng)的用戶體驗和車載診斷的效率。隨著汽車技術(shù)的進(jìn)步和消費者需求的增長,以太網(wǎng)在汽車領(lǐng)域的應(yīng)用前景將繼續(xù)擴(kuò)展和深化。
5.3、以太網(wǎng)在汽車中的優(yōu)勢與限制
優(yōu)勢:
高帶寬:以太網(wǎng)技術(shù)支持非常高的數(shù)據(jù)傳輸速率,最高可達(dá)到100 Gbps。這種高帶寬使得它能夠處理大量的數(shù)據(jù)流,包括高清視頻、音頻和大容量的傳感器數(shù)據(jù),適用于復(fù)雜的汽車應(yīng)用場景,如自動駕駛系統(tǒng)和車載娛樂系統(tǒng)。
多媒體傳輸能力強:以太網(wǎng)不僅可以傳輸基本的數(shù)據(jù)包,還能支持高質(zhì)量的多媒體數(shù)據(jù)傳輸,如高清視頻和音頻流。這使得汽車的信息娛樂系統(tǒng)能夠提供優(yōu)質(zhì)的娛樂體驗,包括視頻流暢播放、在線音樂和互聯(lián)功能等。
靈活性高:以太網(wǎng)的靈活性使得它適用于多種網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)和介質(zhì)類型,如雙絞線、光纖等。它支持不同的網(wǎng)絡(luò)配置和連接方式,能夠滿足不同汽車廠商和系統(tǒng)集成商的需求。
限制:
實時性和確定性不足:傳統(tǒng)以太網(wǎng)在實時性和確定性方面存在挑戰(zhàn)。在汽車應(yīng)用中,特別是對于需要嚴(yán)格時間約束的控制和傳感器數(shù)據(jù)交換,傳統(tǒng)以太網(wǎng)的性能可能不足以滿足要求。這可能導(dǎo)致數(shù)據(jù)包的延遲和抖動,影響系統(tǒng)的實時響應(yīng)能力。
需專用的車載以太網(wǎng)技術(shù):為了解決傳統(tǒng)以太網(wǎng)的實時性和確定性問題,汽車行業(yè)引入了專用的車載以太網(wǎng)技術(shù),如音視頻橋接(AVB,Audio Video Bridging)和時間敏感網(wǎng)絡(luò)(TSN,Time-Sensitive Networking)。這些技術(shù)通過協(xié)議擴(kuò)展和網(wǎng)絡(luò)管理機制,提供了更精確的時間同步和優(yōu)化的數(shù)據(jù)傳輸服務(wù),以滿足汽車系統(tǒng)對實時性能的高要求。
5.4、性能指標(biāo)數(shù)值
最高帶寬:可達(dá)100 Gbps,盡管在汽車應(yīng)用中實際使用的速率通常較低,但高帶寬能夠為未來的汽車電子系統(tǒng)提供足夠的擴(kuò)展性和性能儲備。
總結(jié)來說,以太網(wǎng)作為一種高速、高帶寬的網(wǎng)絡(luò)技術(shù),正在逐步滲透到汽車領(lǐng)域,其優(yōu)勢在于強大的多媒體傳輸能力和高靈活性。然而,傳統(tǒng)以太網(wǎng)在實時性和確定性方面的限制促使汽車行業(yè)尋求特定的解決方案,以確保車輛系統(tǒng)的可靠性和響應(yīng)速度。隨著技術(shù)的進(jìn)步和標(biāo)準(zhǔn)的完善,以太網(wǎng)在汽車領(lǐng)域的應(yīng)用前景將會更加廣闊和多樣化。
#06技術(shù)比較
進(jìn)行CAN、CAN FD、CAN XL和以太網(wǎng)協(xié)議的詳細(xì)比較,包括數(shù)據(jù)速率、數(shù)據(jù)負(fù)載、應(yīng)用場景、可靠性與實時性以及成本方面的分析。
| 特征 / 協(xié)議 | CAN | CAN FD | CAN XL | 以太網(wǎng) |
| 數(shù)據(jù)速率 | 最高1 Mbps | 最高8 Mbps | 目標(biāo)10 Mbps或更高 | 最高100 Gbps |
| 數(shù)據(jù)負(fù)載 | 最多8字節(jié) | 最多64字節(jié) | 最多2048字節(jié) | 多達(dá)1518字節(jié) |
| 應(yīng)用場景 | 傳感器數(shù)據(jù)采集、車身控制、發(fā)動機管理 | 高速傳感器數(shù)據(jù)、復(fù)雜控制指令 | 高速傳感器融合、自動駕駛系統(tǒng) | 多媒體傳輸、高帶寬需求、車載娛樂 |
| 可靠性與實時性 | 高可靠性、實時性較好 | 較高數(shù)據(jù)速率下保持實時性 | 較高數(shù)據(jù)傳輸和更大數(shù)據(jù)幀 | 需通過AVB或TSN增強實時性 |
| 成本 | 低成本、廣泛應(yīng)用 | 適中成本、向下兼容 | 高端硬件成本較高、向下兼容 | 高帶寬硬件較貴、需要特定網(wǎng)絡(luò)設(shè)備 |
技術(shù)比較詳細(xì)說明:
1. 數(shù)據(jù)速率:
CAN:最高傳輸速率為1 Mbps,適合于低速率傳感器數(shù)據(jù)采集和簡單控制指令傳輸。
CAN FD:提升到最高8 Mbps,支持更快速的數(shù)據(jù)傳輸,適合于高速傳感器數(shù)據(jù)和復(fù)雜控制指令。
CAN XL:目標(biāo)為10 Mbps或更高,旨在處理高速傳感器融合和復(fù)雜自動駕駛系統(tǒng)數(shù)據(jù)。
以太網(wǎng):提供最高達(dá)100 Gbps的數(shù)據(jù)傳輸速率,適合處理大規(guī)模多媒體數(shù)據(jù)和高帶寬需求。
2. 數(shù)據(jù)負(fù)載:
CAN:最大數(shù)據(jù)幀長度為8字節(jié),適用于簡單數(shù)據(jù)和控制指令的傳輸。
CAN FD:最大數(shù)據(jù)幀長度擴(kuò)展至64字節(jié),支持更大數(shù)據(jù)負(fù)載的傳輸。
CAN XL:最大數(shù)據(jù)幀長度可達(dá)2048字節(jié),適合處理大塊復(fù)雜數(shù)據(jù),如高分辨率圖像和視頻。
以太網(wǎng):數(shù)據(jù)幀長度最大可達(dá)1518字節(jié),支持大容量數(shù)據(jù)傳輸和多媒體流的處理。
3. 應(yīng)用場景推薦:
CAN:適用于傳感器數(shù)據(jù)采集、車身控制、發(fā)動機管理等簡單控制應(yīng)用。
CAN FD:適合需要高速傳感器數(shù)據(jù)和復(fù)雜控制指令的應(yīng)用場景,如先進(jìn)駕駛輔助系統(tǒng)(ADAS)。
CAN XL:為高速傳感器融合和復(fù)雜自動駕駛系統(tǒng)提供支持,能夠處理大規(guī)模數(shù)據(jù)。
以太網(wǎng):最適合于需要高帶寬和大容量數(shù)據(jù)傳輸?shù)膽?yīng)用,如車載娛樂系統(tǒng)、多媒體傳輸和車輛到云端服務(wù)的實時數(shù)據(jù)交換。
4. 可靠性與實時性:
CAN:在低速率和簡單網(wǎng)絡(luò)環(huán)境下表現(xiàn)可靠,實時性較好。
CAN FD:在保持向下兼容的同時提升了數(shù)據(jù)傳輸速率,實時性能受到一定影響。
CAN XL:高速率和大數(shù)據(jù)幀提升了處理能力,但在實時性需求嚴(yán)格的場景下仍需特殊優(yōu)化。
以太網(wǎng):需要通過AVB(Audio Video Bridging)或TSN(Time-Sensitive Networking)等技術(shù)增強實時性,以應(yīng)對復(fù)雜的實時數(shù)據(jù)處理需求。
5. 成本:
CAN:成本較低,廣泛應(yīng)用于現(xiàn)有的汽車電子系統(tǒng)中。
CAN FD:中等成本,硬件升級較為適中,向下兼容性較好。
CAN XL:高端硬件成本較高,需要針對性地升級現(xiàn)有系統(tǒng)以支持新的數(shù)據(jù)需求。
以太網(wǎng):硬件和設(shè)備成本較高,特別是需要處理高帶寬需求和復(fù)雜數(shù)據(jù)流的場景。
結(jié)論:
根據(jù)具體應(yīng)用需求和技術(shù)特性,選擇適合的通信協(xié)議至關(guān)重要。CAN協(xié)議適合于低速率數(shù)據(jù)傳輸和簡單控制應(yīng)用,而CAN FD和CAN XL則更適合于需要更高速率和大數(shù)據(jù)負(fù)載的復(fù)雜應(yīng)用。以太網(wǎng)則是處理高帶寬和大容量數(shù)據(jù)的首選,尤其在車載娛樂系統(tǒng)和復(fù)雜的多媒體傳輸場景中表現(xiàn)突出。
這些比較和推薦有助于汽車制造商和系統(tǒng)集成商根據(jù)具體的技術(shù)需求和成本考量,選擇最適合其應(yīng)用場景的通信協(xié)議,從而優(yōu)化汽車電子系統(tǒng)的性能和功能。
#07未來發(fā)展趨勢
未來汽車電子系統(tǒng)的發(fā)展將依賴于技術(shù)的創(chuàng)新和市場的需求變化:
技術(shù)創(chuàng)新驅(qū)動:新技術(shù)如CAN XL和車載以太網(wǎng)的引入將推動汽車電子系統(tǒng)向更高性能和更智能化方向發(fā)展。
市場需求變化:消費者對智能駕駛輔助功能和高級車載娛樂系統(tǒng)的需求增加,促使汽車制造商在通信協(xié)議選擇上更加注重性能、可靠性和未來擴(kuò)展性。
環(huán)境法規(guī)影響:車輛安全和排放標(biāo)準(zhǔn)的提高,將進(jìn)一步推動汽車電子系統(tǒng)對數(shù)據(jù)傳輸和處理能力的需求增加,從而對通信協(xié)議提出更高要求。
7.1、 汽車電子系統(tǒng)的發(fā)展方向
未來汽車電子系統(tǒng)將主要集中在智能化、網(wǎng)聯(lián)化和自動化三個方面,這些趨勢對通信協(xié)議提出了新的需求和挑戰(zhàn):
智能化需求:智能汽車需要更多的傳感器數(shù)據(jù)、高效的數(shù)據(jù)處理和智能決策能力。因此,通信協(xié)議需要支持更快速的數(shù)據(jù)傳輸和更大的數(shù)據(jù)負(fù)載,以應(yīng)對復(fù)雜的數(shù)據(jù)處理需求。
網(wǎng)聯(lián)化趨勢:車輛之間的通信(車到車通信,V2V)和車輛與基礎(chǔ)設(shè)施的通信(車到基礎(chǔ)設(shè)施通信,V2I)將成為實現(xiàn)智能交通和自動駕駛的關(guān)鍵。通信協(xié)議需要能夠支持實時的車輛位置和狀態(tài)信息交換,確保交通安全和效率。
自動化驅(qū)動:自動駕駛技術(shù)的推廣將大量依賴于精準(zhǔn)的傳感器數(shù)據(jù)和實時的決策反饋。通信協(xié)議需要具備高可靠性、低延遲和精確的實時性能,以支持自動駕駛系統(tǒng)的安全和可靠性。
7.2、 新技術(shù)的融合:CAN XL和車載以太網(wǎng)
CAN XL和車載以太網(wǎng)代表了未來汽車電子通信領(lǐng)域的兩大發(fā)展方向,它們有望在未來的汽車中得到融合和應(yīng)用:
CAN XL的應(yīng)用前景:CAN XL作為下一代CAN協(xié)議,旨在處理更高速率和更大數(shù)據(jù)幀的傳輸需求。具體性能指標(biāo)包括:
◆最高數(shù)據(jù)速率:目標(biāo)為10 Mbps或更高。
◆最大數(shù)據(jù)幀長度:可達(dá)2048字節(jié),支持處理大塊復(fù)雜數(shù)據(jù),如高分辨率圖像和視頻。
CAN XL在自動駕駛系統(tǒng)、高速傳感器數(shù)據(jù)融合以及復(fù)雜車輛控制系統(tǒng)中有著廣泛的應(yīng)用前景。
車載以太網(wǎng)的優(yōu)勢:以太網(wǎng)在帶寬和數(shù)據(jù)處理能力上的優(yōu)勢使得它適合處理高清視頻、復(fù)雜的多媒體數(shù)據(jù)和大容量的傳感器數(shù)據(jù)。未來,車載以太網(wǎng)有望在高級駕駛輔助系統(tǒng)(ADAS)和車載娛樂系統(tǒng)中發(fā)揮關(guān)鍵作用。具體性能指標(biāo)包括:
◆最高數(shù)據(jù)速率:可達(dá)100 Gbps。
◆最大數(shù)據(jù)幀長度:多達(dá)1518字節(jié),支持處理大容量數(shù)據(jù)和多媒體流。
7.3、 標(biāo)準(zhǔn)化與互操作性
隨著汽車電子系統(tǒng)的復(fù)雜化和多樣化,國際標(biāo)準(zhǔn)的制定和通信協(xié)議之間的互操作性變得尤為重要:
國際標(biāo)準(zhǔn)的制定:CAN、CAN FD、CAN XL和車載以太網(wǎng)等通信協(xié)議的標(biāo)準(zhǔn)化將推動行業(yè)技術(shù)的統(tǒng)一和發(fā)展。標(biāo)準(zhǔn)化能夠確保不同廠商和系統(tǒng)組件之間的兼容性和一致性,降低系統(tǒng)集成和維護(hù)的成本。
協(xié)議之間的互操作性:跨協(xié)議的互操作性將成為未來發(fā)展的重要趨勢。例如,將CAN XL與車載以太網(wǎng)技術(shù)進(jìn)行整合,以實現(xiàn)不同傳感器和控制單元之間的無縫數(shù)據(jù)交換和協(xié)同工作。
綜上所述,未來汽車電子系統(tǒng)的發(fā)展趨勢將集中在智能化、網(wǎng)聯(lián)化和自動化上,這些趨勢將推動通信協(xié)議向更高性能、更大數(shù)據(jù)負(fù)載和更強互操作性的方向發(fā)展,以滿足日益復(fù)雜的汽車應(yīng)用需求。隨著技術(shù)的不斷演進(jìn)和標(biāo)準(zhǔn)的完善,汽車電子系統(tǒng)將迎來更加豐富和創(chuàng)新的應(yīng)用場景。
#08結(jié) 論
根據(jù)目前的技術(shù)發(fā)展和市場趨勢,各通信協(xié)議在汽車電子系統(tǒng)中有著不同的特點和應(yīng)用優(yōu)勢。建議根據(jù)具體的汽車應(yīng)用場景選擇合適的通信協(xié)議,同時展望未來汽車通信協(xié)議的發(fā)展趨勢及其對汽車行業(yè)的影響。
8.1、CAN 協(xié)議
特點和優(yōu)勢:
1.數(shù)據(jù)速率:最高1 Mbps。
2.數(shù)據(jù)負(fù)載:最多8字節(jié)。
3.應(yīng)用優(yōu)勢:
適合于低速率的傳感器數(shù)據(jù)采集和基本的車身控制。
高可靠性和實時性,廣泛應(yīng)用于傳統(tǒng)的汽車電子系統(tǒng)中。
8.2、CAN FD 協(xié)議
特點和優(yōu)勢:
1.數(shù)據(jù)速率:最高8 Mbps。
2.數(shù)據(jù)負(fù)載:最多64字節(jié)。
3.應(yīng)用優(yōu)勢:
支持更快速的數(shù)據(jù)傳輸,適合于需要高速傳感器數(shù)據(jù)和復(fù)雜控制指令的應(yīng)用。
向下兼容性好,可逐步替代傳統(tǒng)的CAN協(xié)議,提升系統(tǒng)性能。
8.3、CAN XL 協(xié)議
特點和優(yōu)勢:
1.預(yù)期數(shù)據(jù)速率:目標(biāo)達(dá)到10 Mbps或更高。
2.數(shù)據(jù)負(fù)載:最多2048字節(jié)。
3.應(yīng)用優(yōu)勢:
適合處理高速傳感器數(shù)據(jù)融合和復(fù)雜自動駕駛系統(tǒng)的大數(shù)據(jù)需求。
向下兼容現(xiàn)有的CAN協(xié)議,能夠應(yīng)對未來汽車電子系統(tǒng)的高性能要求。
8.4、車載以太網(wǎng)
特點和優(yōu)勢:
1.數(shù)據(jù)速率:最高可達(dá)100 Gbps。
2.數(shù)據(jù)負(fù)載:多達(dá)1518字節(jié)。
3.應(yīng)用優(yōu)勢:
高帶寬和大容量數(shù)據(jù)傳輸,適合處理復(fù)雜的多媒體數(shù)據(jù)、高清視頻和大規(guī)模傳感器數(shù)據(jù)。
在高級駕駛輔助系統(tǒng)(ADAS)、車載娛樂系統(tǒng)和車輛到云端服務(wù)等領(lǐng)域具有顯著優(yōu)勢。
8.5、建議
根據(jù)不同的汽車應(yīng)用場景,可以根據(jù)以下幾點建議選擇合適的通信協(xié)議:
傳感器數(shù)據(jù)采集和基本控制:對于低速率的傳感器數(shù)據(jù)和基本的車身控制,如發(fā)動機控制單元(ECU)和車門鎖控制,建議使用CAN協(xié)議。
高速傳感器數(shù)據(jù)和復(fù)雜控制指令:需要更快速數(shù)據(jù)傳輸和支持更大數(shù)據(jù)負(fù)載的應(yīng)用,如高級駕駛輔助系統(tǒng)(ADAS),推薦使用CAN FD協(xié)議。
自動駕駛系統(tǒng)和大數(shù)據(jù)需求:針對處理高速傳感器數(shù)據(jù)融合和復(fù)雜自動駕駛系統(tǒng)數(shù)據(jù)的需求,未來可以考慮過渡到CAN XL協(xié)議。
多媒體數(shù)據(jù)傳輸和高帶寬需求:針對處理大量多媒體數(shù)據(jù)、高清視頻和復(fù)雜的車載娛樂系統(tǒng),推薦采用車載以太網(wǎng)技術(shù)。
8.6、展望未來
隨著智能化、網(wǎng)聯(lián)化和自動化趨勢的推進(jìn),未來汽車通信協(xié)議將面臨以下發(fā)展趨勢和影響:
技術(shù)融合和協(xié)議演進(jìn):CAN XL和車載以太網(wǎng)等新技術(shù)的應(yīng)用將進(jìn)一步推動汽車電子系統(tǒng)向高性能和高可靠性方向發(fā)展。
標(biāo)準(zhǔn)化和互操作性:國際標(biāo)準(zhǔn)的制定和通信協(xié)議之間的互操作性將成為發(fā)展的重要推動力,確保不同廠商和系統(tǒng)組件的兼容性和一致性。
市場應(yīng)用擴(kuò)展:隨著消費者需求的變化和新技術(shù)的應(yīng)用,未來汽車電子系統(tǒng)將更加多樣化和智能化,為駕駛員和乘客提供更安全、舒適和智能的出行體驗。
綜上所述,選擇合適的通信協(xié)議對于優(yōu)化汽車電子系統(tǒng)的性能和功能至關(guān)重要。隨著技術(shù)的不斷進(jìn)步和市場需求的演變,未來汽車通信協(xié)議將不斷演進(jìn)和完善,以應(yīng)對日益復(fù)雜和多樣化的汽車應(yīng)用需求。
-
以太網(wǎng)
+關(guān)注
關(guān)注
40文章
5419瀏覽量
171597 -
通信協(xié)議
+關(guān)注
關(guān)注
28文章
879瀏覽量
40297 -
CAN
+關(guān)注
關(guān)注
57文章
2744瀏覽量
463613 -
CAN FD
+關(guān)注
關(guān)注
0文章
78瀏覽量
12899
原文標(biāo)題:CAN / CANFD / CANXL / 以太網(wǎng) 知識點整理
文章出處:【微信號:Rocker-IC,微信公眾號:路科驗證】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
以太網(wǎng)分析、車載總線協(xié)議解碼、CAN位時間測試3個方面解讀示波器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論