") ADAS要如何運用深度學(xué)習(xí)?
ADAS要如何運用深度學(xué)習(xí)?
北京交通大學(xué)電子信息工程學(xué)院袁雪副教授給我們講解了在高級輔助駕駛系統(tǒng)(ADAS)中的多任務(wù)深度學(xué)習(xí)框架的應(yīng)用。
內(nèi)容提綱:
ADAS系統(tǒng)包括車輛檢測、行人檢測、交通標(biāo)志識別、車道線檢測等多種任務(wù),同時,由于無人駕駛等應(yīng)用場景的要求,車載視覺系統(tǒng)還應(yīng)具備相應(yīng)速度快、精度高、任務(wù)多等要求。對于傳統(tǒng)的圖像檢測與識別框架而言,短時間內(nèi)同時完成多類的圖像分析任務(wù)是難以實現(xiàn)的。
袁雪副教授的項目組提出使用一個深度神經(jīng)網(wǎng)絡(luò)模型實現(xiàn)交通場景中多任務(wù)處理的方法。其中交通場景的分析主要包括以下三個方面:大目標(biāo)檢測(車輛、行人和非機動車),小目標(biāo)分類(交通標(biāo)志和紅綠燈)以及可行駛區(qū)域(道路和車道線)的分割。
這三類任務(wù)可以通過一個深度神經(jīng)網(wǎng)絡(luò)的前向傳播完成,這不僅可以提高系統(tǒng)的檢測速度,減少計算參數(shù),而且可以通過增加主干網(wǎng)絡(luò)的層數(shù)的方式提高檢測和分割精度。
以下為當(dāng)天分享的內(nèi)容總結(jié)。
圖文分享總結(jié)
一、任務(wù)分析
WHO在2009年統(tǒng)計的一個數(shù)據(jù)顯示,在全世界范圍內(nèi)每年由交通事故死亡的人數(shù)有123萬人。但是我們知道,在朝鮮戰(zhàn)爭中,整個戰(zhàn)爭死亡的人數(shù)也差不多一百多萬。也就是說,每年死于交通事故的人數(shù)差不多等于一次非常慘烈的戰(zhàn)爭的死亡人數(shù)了。根據(jù)WHO統(tǒng)計,在全世界范圍內(nèi)每年由交通事故造成的死亡人數(shù)有123萬之多;而發(fā)生交通事故90%是由司機人為原因造成的,比如注意力不集中、超速、安全意識弱等等。所以目前減少交通事故的最主要途徑通過采用高級輔助駕駛系統(tǒng)(ADAS)就是減少認(rèn)為錯誤。
對于ADAS系統(tǒng),基本上包括這些功能:夜視輔助、車道保持、司機提醒、防撞提醒、車道變換輔助、停車輔助、碰撞疏解、死角障礙物檢測、交通標(biāo)志識別、車道線偏移提醒、司機狀態(tài)監(jiān)測、遠(yuǎn)光燈輔助等。這些功能是ADAS所必備的。
為了實現(xiàn)這些功能,一般其傳感器需要包括視覺傳感器、超聲波傳感器、GPS&Map傳感器、Lidar傳感器、Radar傳感器,還有一些別的通信設(shè)備。但是我們在市面上看到的大多數(shù)傳感器其功能其實是比較少的,例如mobile I,它只有車道保持、交通標(biāo)志識別、前車監(jiān)測和距離監(jiān)測的功能,但并不全面。從廠家或者用戶的角度來說,自然我們希望能用最便宜的傳感器來完成更多ADAS的功能。最便宜的傳感器基本上就是視覺傳感器。所以我們設(shè)計方案時就想,能不能通過算法將視覺傳感器實現(xiàn)更多ADAS系統(tǒng)的功能呢?這就是我們整個研發(fā)的初衷。
此外,我們還需要考慮ADAS的一些特點。ADAS系統(tǒng)(包括無人駕駛)是在一個嵌入式平臺下進(jìn)行的,也就是說它的計算資源很少。那么我們也必須考慮如何在這樣一個計算資源非常少的基礎(chǔ)上,保證ADAS系統(tǒng)能夠快速且高精度地響應(yīng),同時還能保證多任務(wù)的需求。這是我們第二個要考慮的問題。
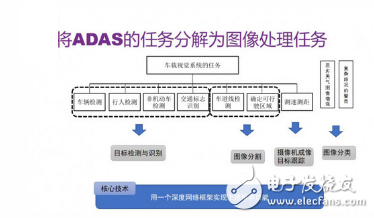
為了解決以上兩個問題,我們首先把ADAS的任務(wù)分解一下。如圖所示,我們將ADAS的任務(wù)分解成目標(biāo)檢測與識別、圖像分割、攝像機成像目標(biāo)跟蹤、圖像分割。我們過去一年多的研發(fā)工作其實就是,用一個深度學(xué)習(xí)框架來同時實現(xiàn)上述這四個的功能。
對于一個前向傳播的網(wǎng)絡(luò),其計算量和計算時間主要取決于它的參數(shù)數(shù)量,而80%的參數(shù)都來自全鏈接層,所以我們的第一個想法就是去掉全鏈接層。其次,網(wǎng)絡(luò)越深,它的參數(shù)就會越多所以如果我們把目標(biāo)檢測與識別、圖像分割、攝像機成像目標(biāo)跟蹤、圖像分割做成四個網(wǎng)絡(luò)的話,就會有X4倍的參數(shù)。
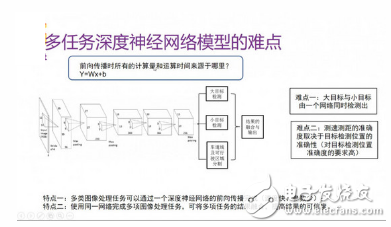
所以針對這兩個考量,我們用一個主干的網(wǎng)絡(luò)來做前面的運算,然后在后面再根據(jù)具體的任務(wù)分成多個小的分支加到主干網(wǎng)絡(luò)上。這樣多個圖像處理的任務(wù)就可以通過一個主干網(wǎng)絡(luò)的前向傳播來完成了,其參數(shù)大大減少,計算速度也變的更快。同時我們也能實現(xiàn)多個任務(wù)同時進(jìn)行的需求。另外,在最后我們還可以將多個結(jié)果進(jìn)行融合,駕到訓(xùn)練過程的調(diào)整中,這樣就可以提高我們結(jié)果的可信性。
但是在這個過程中我們也碰到一些難點。第一個難點就是我們在同一個網(wǎng)絡(luò)中需要將較大的目標(biāo)(例如車輛)和較小的目標(biāo)(例如交通標(biāo)志)同時檢測出來。第二個難點是,測速測距時我們需要的目標(biāo)的位置是非常精確的,目前這個問題我們還沒有解決。
-
無人駕駛
+關(guān)注
關(guān)注
98文章
4072瀏覽量
120611 -
ADAS系統(tǒng)
+關(guān)注
關(guān)注
4文章
226瀏覽量
25723 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5506瀏覽量
121262
發(fā)布評論請先 登錄
相關(guān)推薦
NPU在深度學(xué)習(xí)中的應(yīng)用
GPU深度學(xué)習(xí)應(yīng)用案例
AI大模型與深度學(xué)習(xí)的關(guān)系
FPGA做深度學(xué)習(xí)能走多遠(yuǎn)?
深度學(xué)習(xí)中的時間序列分類方法
深度學(xué)習(xí)中的無監(jiān)督學(xué)習(xí)方法綜述
深度學(xué)習(xí)與nlp的區(qū)別在哪
深度學(xué)習(xí)中的模型權(quán)重
深度學(xué)習(xí)常用的Python庫
深度學(xué)習(xí)與傳統(tǒng)機器學(xué)習(xí)的對比
深度解析深度學(xué)習(xí)下的語義SLAM

為什么深度學(xué)習(xí)的效果更好?

什么是深度學(xué)習(xí)?機器學(xué)習(xí)和深度學(xué)習(xí)的主要差異






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論