


現代電機與控制技術以電流驅動模式的不同將永磁無刷直流電動機分為兩大類:
1)方波驅動電機,也即無刷直流電機(BLDC);
2)正弦波驅動電機:也即永磁同步電機(PMSM)。
表面來看,BLDC和PMSM的基本結構是相同的:
1)它們的電動機都是永磁電動機,轉子由永磁體組成基本結構,定子安放有多相交流繞組;
2)都是由永久磁鐵轉子和定子的交流電流相互作用產生電機的轉矩;
3)在繞組中的定子電流必須與轉子位置反饋同步;
4)轉子位置反饋信號可以來自轉子位置傳感器,或者像在一些無傳感器控制方式那樣通過檢側電機相繞組的反電動勢等方法得到。
雖然在永磁同步電動機和無刷直流電動機的基本架構相同,但它們因驅動方式不同,是的其在設計和控制細節上存在明顯的區別。
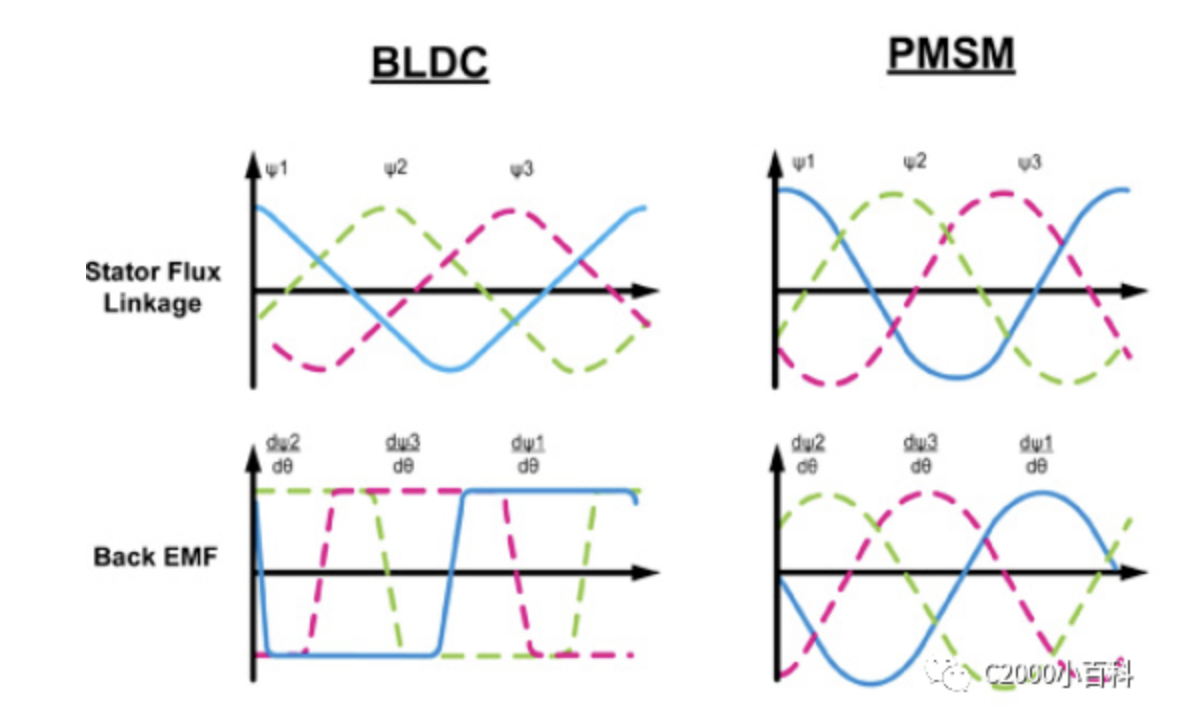
1)反電勢不同, PMSM具有正弦波反電勢,而BLDC具有梯形波反電勢;
2)定子繞組分布不同, PMSM采用短距分布繞組,有時也采用分數槽或正弦繞組,以進一步減小紋波轉矩;而BLDC采用整距集中繞組。
3)運行電流不同,為產生恒定電磁轉矩,PMSM為正弦波定子電流;BLDC為矩形波電流。
4)永磁體形狀不同, PMSM永磁體形狀呈拋物線形,在氣隙中產生的磁密盡量呈正弦波分布;BLDC永磁體形狀呈瓦片形,在氣隙中產生的磁密呈梯形波分布。
5)運行方式不同, PMSM采用三相同時工作,每相電流相差120°電角度,要求有位置傳感器。BLDC采用繞組兩兩導通,每相導通120°電角度,每60°電角度換相,只需要換相點位置檢測。正是這些不同之處,使得在對PMSM和BLDCM的控制方法、控制策略和控制電路上有很大差別。
因設計上和控制上存在區別,導致PMSM和BLDC特性也不同,性能對比如下:
1;轉矩波動
轉矩脈動是機電伺服系統的最大問題, 它直接影響精確的位置控制和高性能的速度控制很困難。在高速情況下, 轉子慣量可以過濾掉轉矩波動。但在低速和直接驅動應用場合, 轉矩波動將嚴重影響系統性能, 將使系統的精度和重復性惡化。而空間精密機電伺服系統絕大多數工作在低速場合,因此電機轉矩脈動問題是影響系統性能的關鍵因素之一。PMSM和BLDCM都存在轉矩脈動問題。轉矩脈動主要有以下幾個原因造成:齒槽效應和磁通畸變、電流換相引起的轉矩及機械加工制造引起的轉矩。
2;功率密度
在機器人和空間作動器等高性能指標應用場合, 對于給定的輸出功率, 要求電機重量越小越好。功率密度受電機散熱能力即電機定子表面積的限制。對于永磁電機, 絕大多數的功率損耗產生在定子, 包括銅耗、渦流損耗和磁滯損耗, 而轉子損耗經常被忽略。所以對于一個給定的結構尺寸,電機損耗越小,允許的功率密度就越高。參考《永磁無刷直流電機技術》,知在相同的尺寸下, BDLC與PMSM相比,可以多提供15%的功率輸出。如果鐵耗也相同,BDLC的功率密度比PMSM可提高15%。
3;轉矩慣量比
轉矩慣量比指的是電機本身所能提供的最大加速度。因為BDLC可以比PMSM多提供15%的輸出功率, 所以它可獲得被PMSM多15%的電磁轉矩。如果BDLC和PMSM具有相同速度,它們的轉子轉動慣量也相同,那么BDLC的轉矩慣量比要比PMSM大15%。
4;傳感器方面
1)轉子位置檢測:BLDC中每一時刻只有兩相繞組導通, 每相導通120°電角度, 只要正確檢測出這些換相點, 就能保證電機正常運行, 通常使用3個霍爾傳感器。在PMSM中,需要正弦波電流,電機工作時所有三相繞組同時導通, 需要連續的位置傳感器, 最常見的是精度很高的編碼器。
(2)電流檢測:對于三相電動機而言,為了控制繞組電流,需要得到三相電流信息。通常采用兩個電流傳感器,因為三相電流之和為0。對于一些簡易型無刷直流電機控制系統鐘,可只采用一個電流傳感器來檢測母線的電流來降低成本。
-
電機控制
+關注
關注
3572文章
1958瀏覽量
271860 -
BLDC
+關注
關注
213文章
831瀏覽量
98249 -
PMSM
+關注
關注
14文章
248瀏覽量
42673 -
正弦波控制
+關注
關注
0文章
7瀏覽量
1562 -
方波控制
+關注
關注
0文章
10瀏覽量
5076
發布評論請先 登錄
STM32F1-MCD-IPM30 2.2KW BLDC PMSM FOC正弦波控制雙電機同步控制電機套件方案
一文了解BLDC與PMSM的區別
無刷電機BLDC與PMSM的區別詳解

純正弦波逆變器、修正弦波逆變器和方波逆變器有哪些區別

為什么用在有齒無刷電機的控制器是方波而不是正弦波輸出?
為什么用在有齒無刷電機的控制器是方波而不是正弦波輸出?






 工商網監
工商網監

評論