 8軸/4軸的EtherCAT軸模塊EIO24088G-V2及EIO16084G的使用(一):TwinCAT總線配置與使用
8軸/4軸的EtherCAT軸模塊EIO24088G-V2及EIO16084G的使用(一):TwinCAT總線配置與使用
上節課給大家介紹了 EIO24088-V2及EIO16084結合RTSys進行總線配置與使用,詳情請點擊→8軸/4軸的EtherCAT軸模塊EIO24088-V2及EIO16084的使用(一):RTSys總線配置與使用。
今天正運動給大家分享一下EIO24088G-V2及EIO16084G如何用TwinCAT 進行總線配置和使用。
EIO24088G-V2擴展模塊硬件介紹
EIO24088G-V2總線擴展模塊是EtherCAT總線控制器使用的擴展模塊,當數字IO、脈沖軸資源不夠需要擴展增加的時候,控制器可通過EtherCAT總線連接多個EtherCAT擴展模塊進行擴展。控制器可通過映射編號直接訪問EIO24088G-V2的IO資源和軸資源。
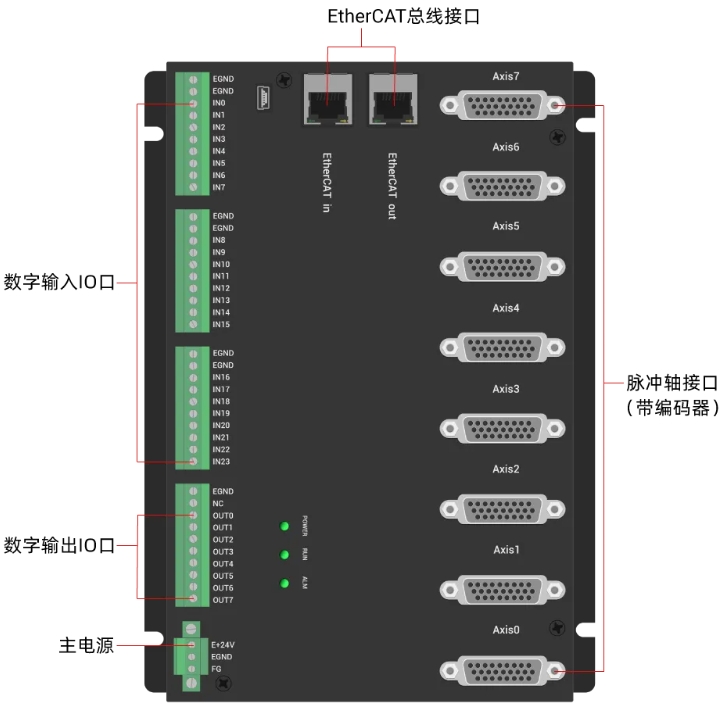
支持8個脈沖軸進行擴展;
支持擴展24路數字量輸入和8路數字量輸出,每個脈沖軸另外各有1路數字量輸入和1路數字量輸出可供配置;
脈沖輸出模式為方向/脈沖或雙脈沖輸出;
每軸最大輸出脈沖頻率10MHz;
脈沖軸以外的輸出口最大輸出電流達300mA,可直接驅動部分電磁閥。
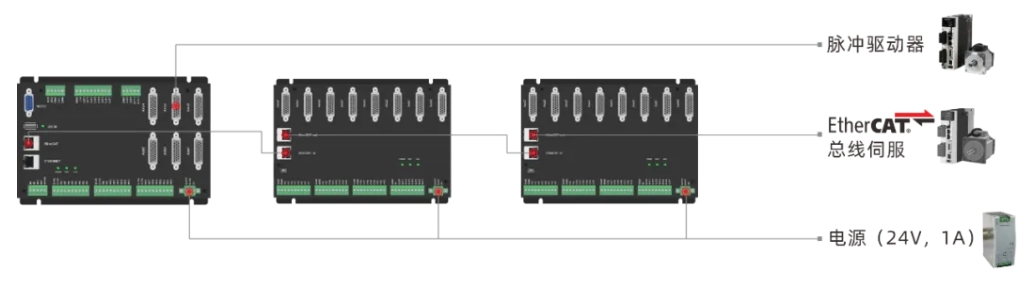
應用框圖如下所示:
EIO16084G擴展模塊硬件介紹
EIO16084G總線擴展模塊是EtherCAT總線控制器使用的擴展模塊,當數字IO、脈沖軸資源不夠需要擴展增加的時候,控制器可通過EtherCAT總線連接多個EtherCAT擴展模塊進行擴展。控制器可通過映射編號直接訪問EIO16084G的IO資源和軸資源。
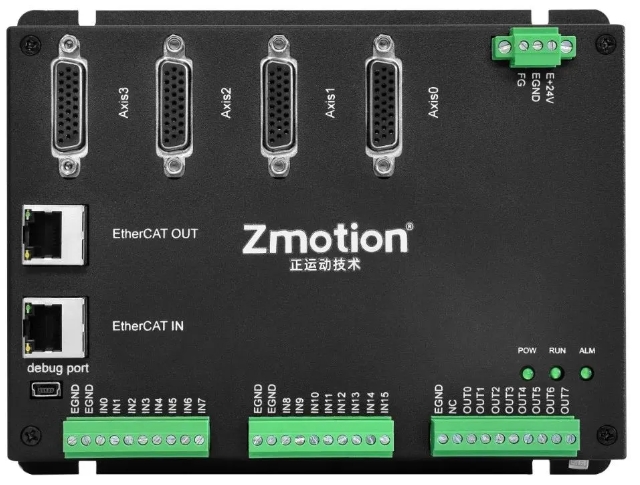
支持4個脈沖軸擴展;
支持擴展16路數字量輸入和8路數字量輸出,每個脈沖軸另外各有2路輸入和2路輸出IO可供配置;
脈沖輸出模式為方向/脈沖或雙脈沖;
每軸最大輸出脈沖頻率10MHz;
脈沖軸以外的輸出口最大輸出電流達300mA,可直接驅動部分電磁閥。
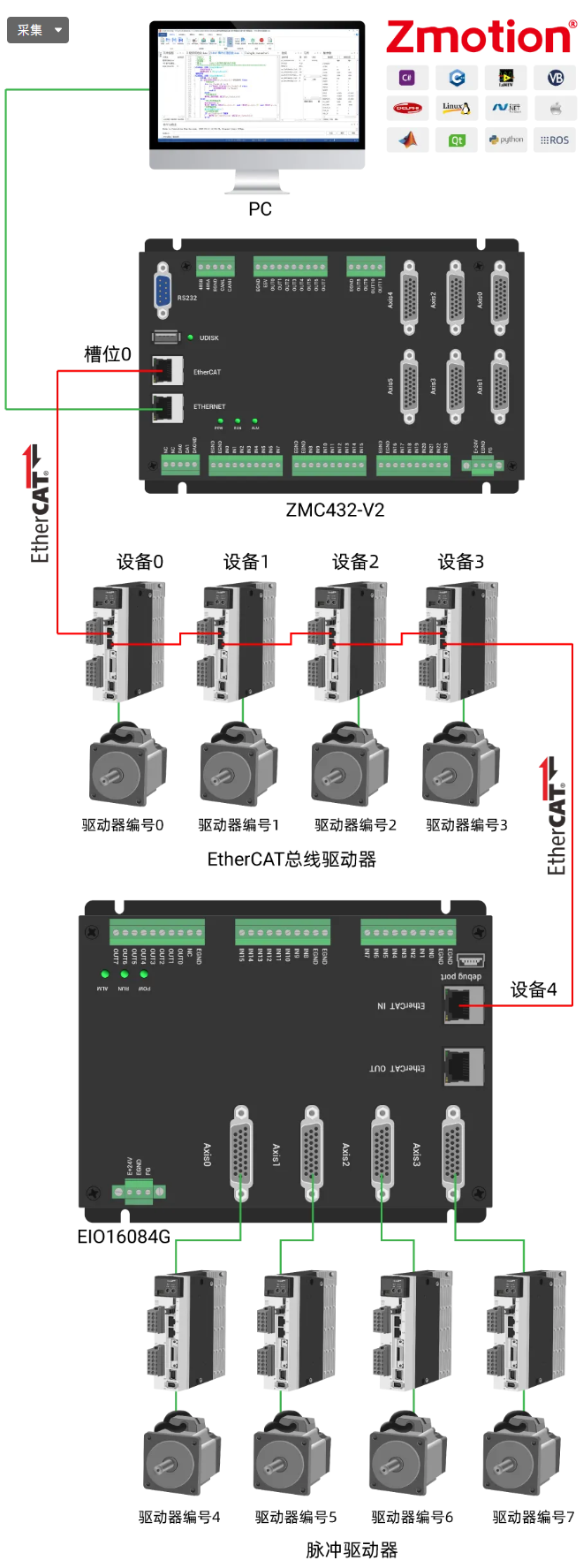
應用框圖如下所示:
一、接口說明
1、EtherCAT總線通訊接口的接線
EIO24088G-V2帶兩個EtherCAT總線接口,接線時注意EtherCAT IN連接主控制器或上級模塊,EtherCAT OUT連接下一級擴展板,IN和OUT口不可混用。
2、通用輸入口
EIO24088G-V2帶24個通用輸入口,輸入口需要 先使用NODE_IO指令配置IO地址編號才能通過控制器端操作。 通用輸入口IN的內部電路參考圖如下,輸入口參數參見下表。
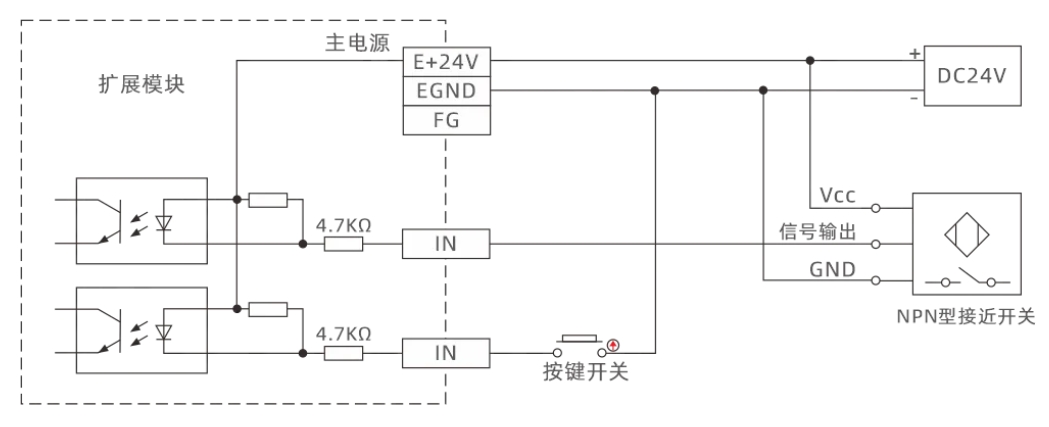
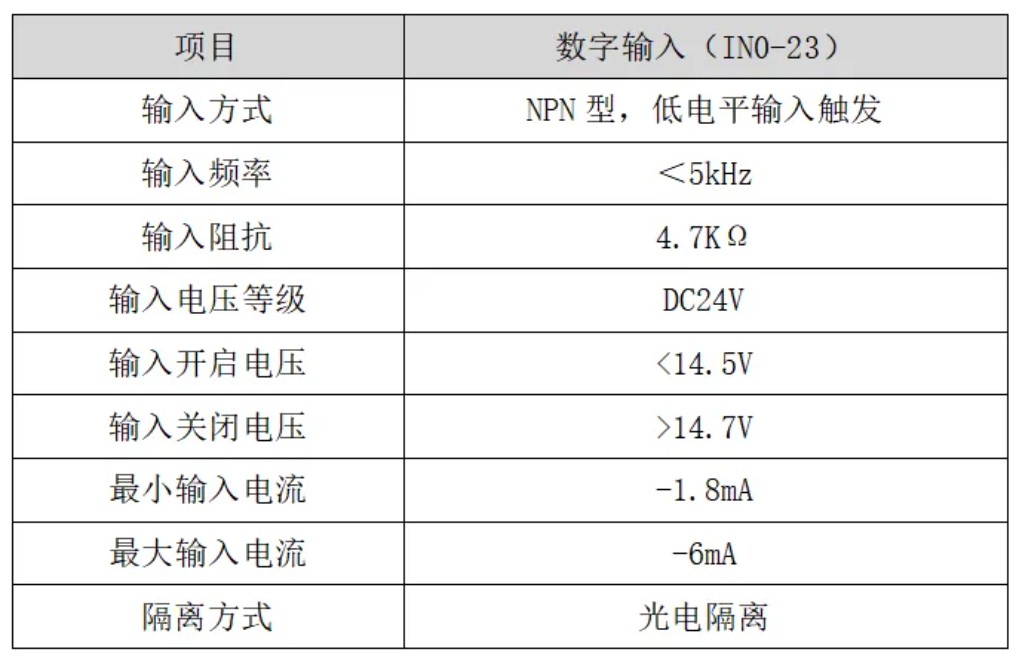
輸入口參數說明:
3、通用輸出口
EIO24088G-V2帶8個通用輸出口,輸出口需要先使用NODE_IO指令配置IO地址編號后才能通過控制器端操作(NODE_IO指令使用一次便可配置好輸入和輸出)。通用輸出口OUT的內部電路參考圖如下,輸出口參數參見下表。
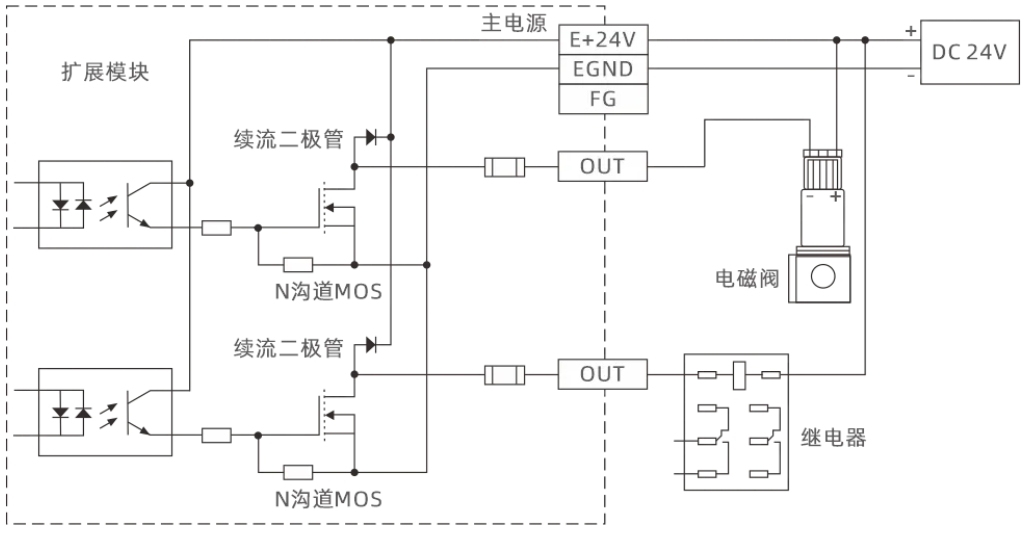
輸出口參數說明:

4、軸接口
EIO24088G-V2的軸接口有8個,采用DB26針腳,軸接口包含差分脈沖輸入信號和差分編碼器輸入信號,同時有一路通用輸入口和一路通用輸出口(EIO16084G有兩路通用輸入口和兩路通用輸出信號)。
針腳定義說明:
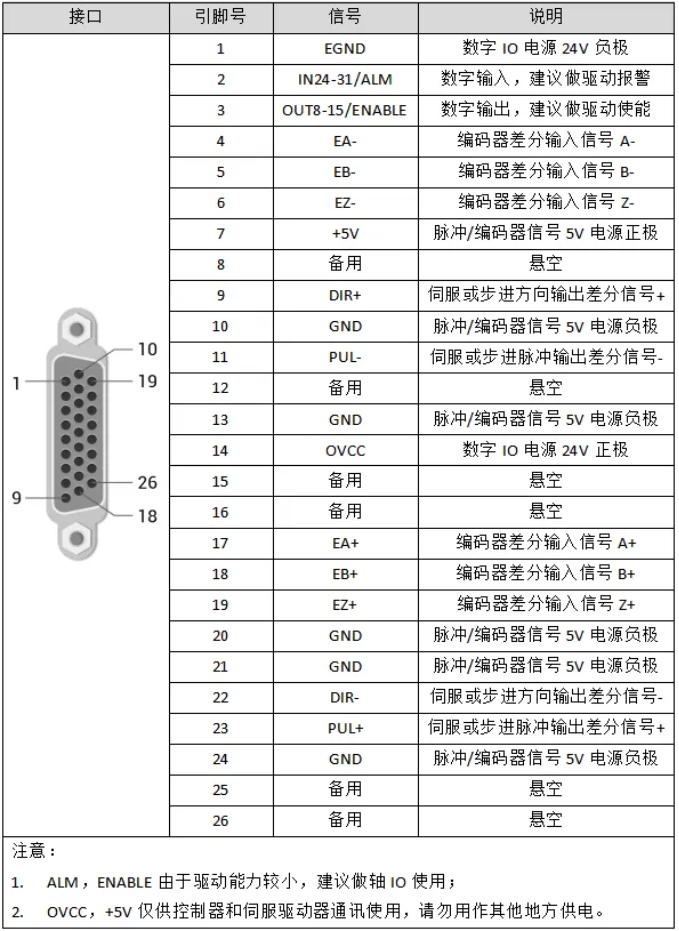
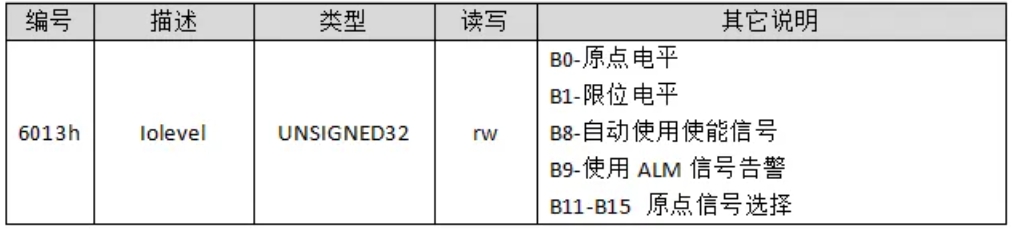
可以通過數據字典中的6013h配置EIO擴展板直接使能與告警,缺省不使用,需要主控制器來操作。
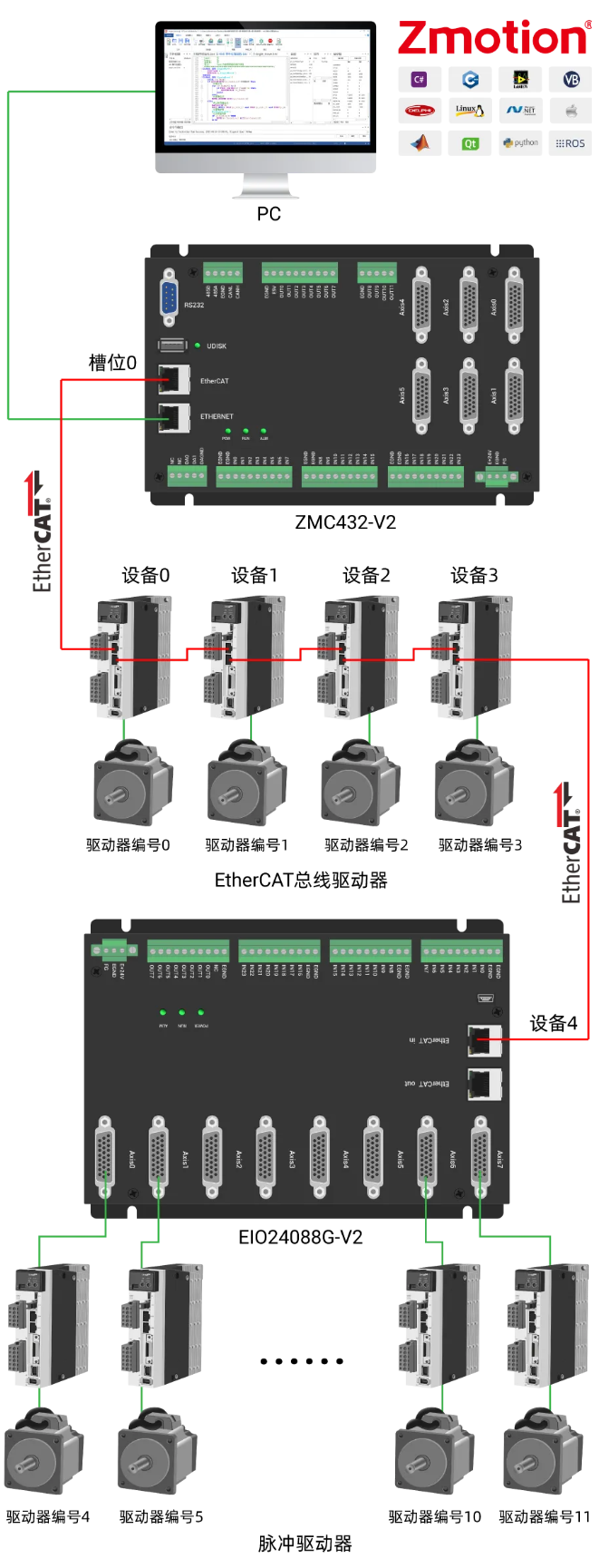
二、總線接線參考
EIO24088G-V2擴展模塊接線規則: EIO24088G-V2可接到EtherCAT總線上的任意節點。
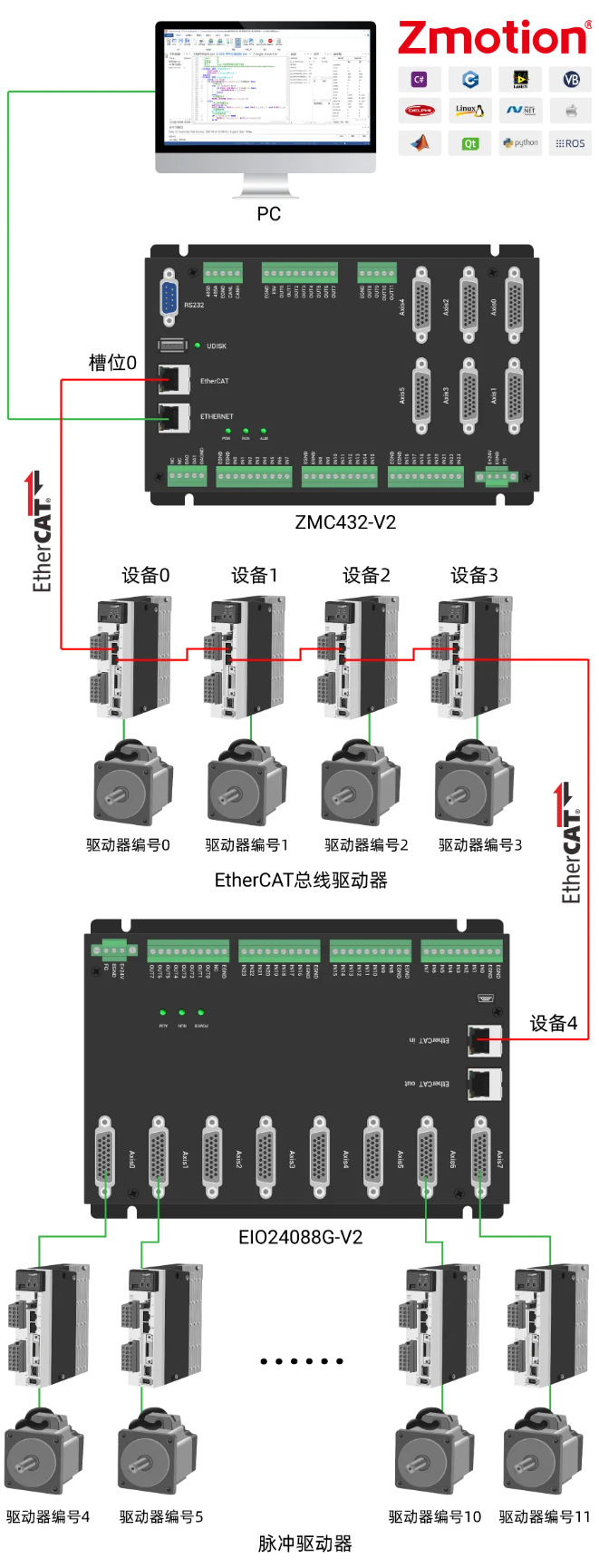
EIO24088G-V2為總線上的一個設備節點,可接入8個脈沖型驅動器,驅動器按照AXIS 0到AXIS 7的順序依次編號,并且遵從總線上的驅動器編號規則,需要進行軸映射。
驅動器的使能信號為脈沖接口內的通用輸出口,直接通過主控制器的OP指令來使能,或使用SDO指令配置數據字典6013h中的BIT8為1后為即可自動使能,主控制器無法直接控制對應的輸出口來使能,只需WDOG置1及對應軸的AXIS_ENABLE置1即可。
注意:軸擴展模塊的使用個數不是無限制的,參考控制器可擴展的最大軸數。
控制器、EIO擴展模塊和驅動器的接線參考如下圖 : ZMC432-V2本體有6個脈沖軸,通過EtherCAT擴展了節點0、1、2、3四個總線軸,節點4八個總線轉脈沖軸。擴展軸上的AXIS0-7(對應下圖中驅動器編號4-11)分別手動映射為軸號10-17。
涉及的 總線相關指令參數概念如下:
1、槽位號(slot)
槽位號是指控制器上總線接口的編號,缺省為0。當控制器上有多個總線接口時,在線命令發送?*SLOT查看。
運動控制器支持單總線時,槽位號為0。
支持雙總線時,EtherCAT總線槽位號為0,RTEX總線槽位號為1。
2、設備號(node)
設備號是指一個槽位上連接的所有設備的編號,從0開始,按設備在總線上的連接順序自動編號,可以通過NODE_COUNT(slot)指令查看總線上連接的設備總數。
3、驅動器編號
控制器會自動識別出槽位上的驅動器,編號從0開始,按驅動器在總線上的連接順序自動編號。
驅動器編號與設備號不同,只給槽位上的驅動器設備編號,其他設備忽略。
三、通過TwinCAT測試擴展的資源
1、安裝TwinCAT(安裝至C盤),創建一個TwinCAT的項目

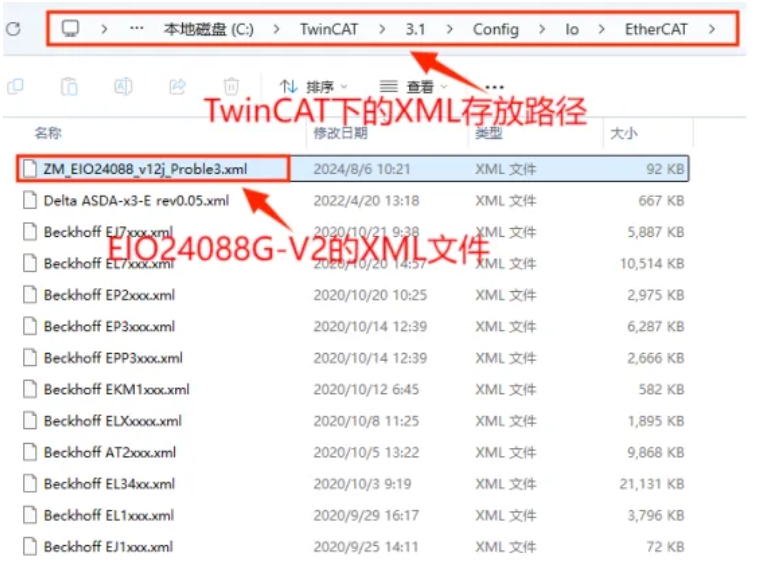
2、把EIO24088G-V2的XML文件放入下圖所示的TwinCAT的路徑下,對應XML文件可找正運動廠商提供
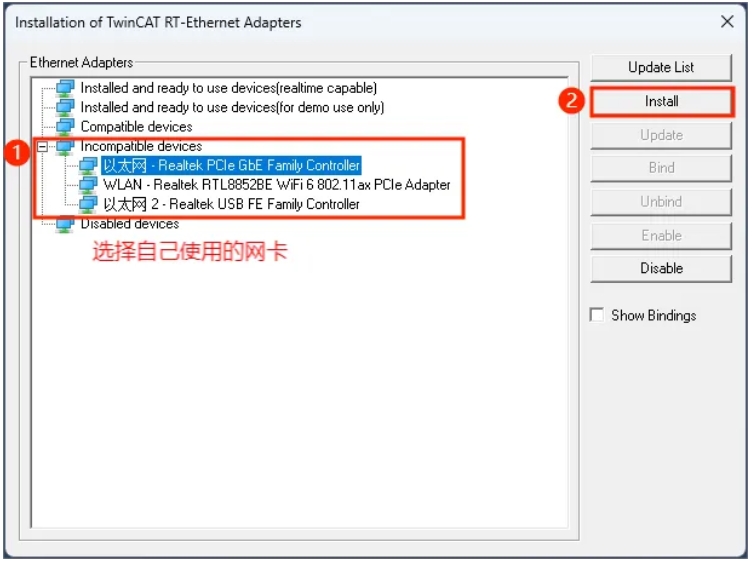
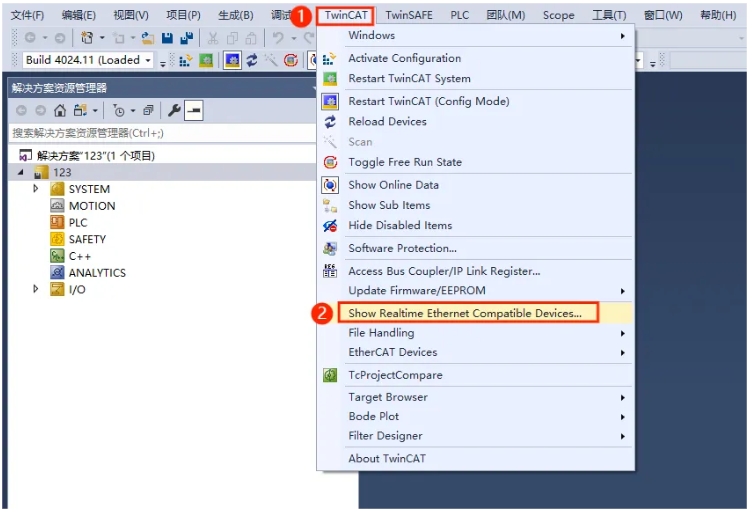
3、安裝TwinCAT網卡驅動
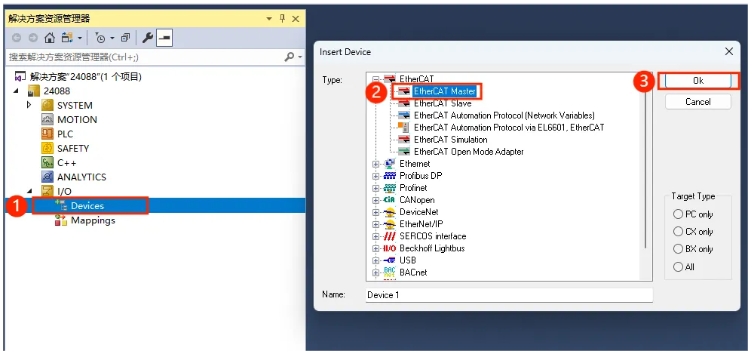
4、添加EtherCAT主站
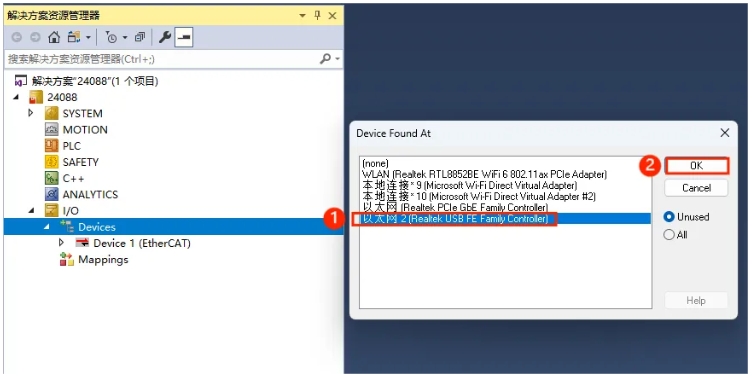
5、選擇EIO24088G-V2所使用的TwinCAT驅動的網卡
這里是使用網口轉USB連接到電腦上的,所以選擇以太網2,如果是直接連接到電腦的網口處選擇以太網。
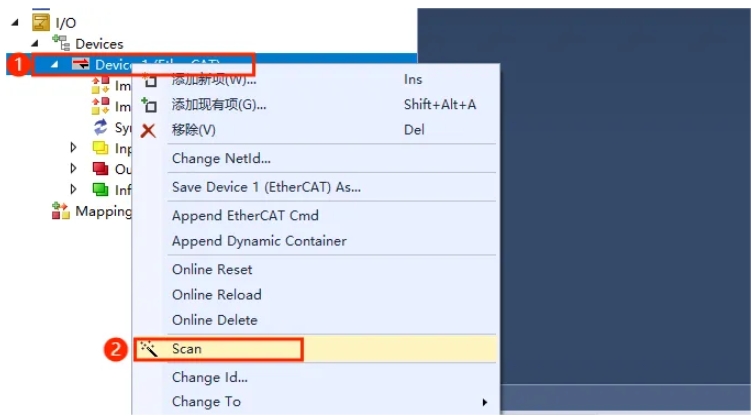
6、掃描ECAT從站
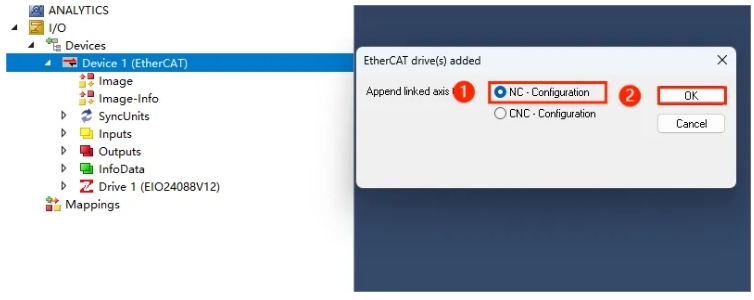
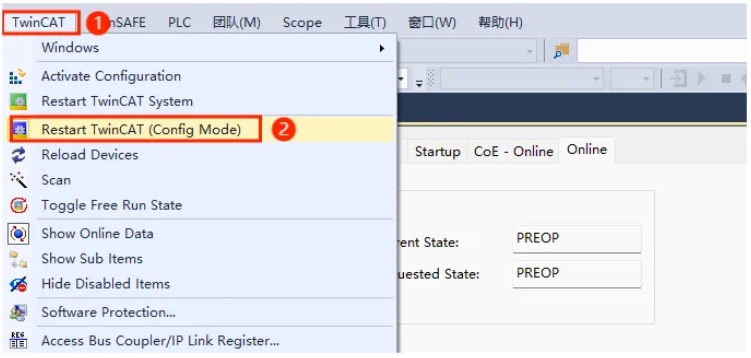
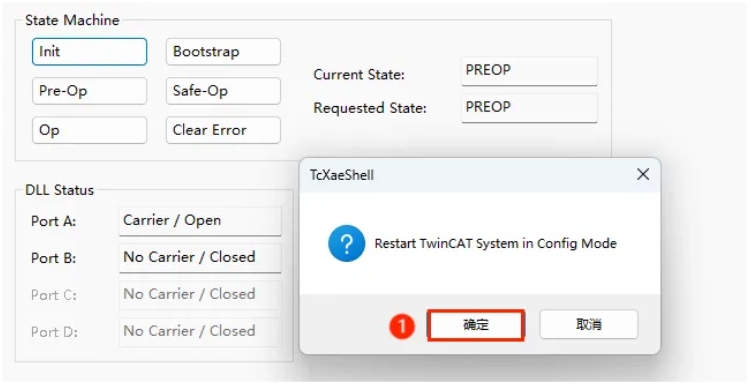
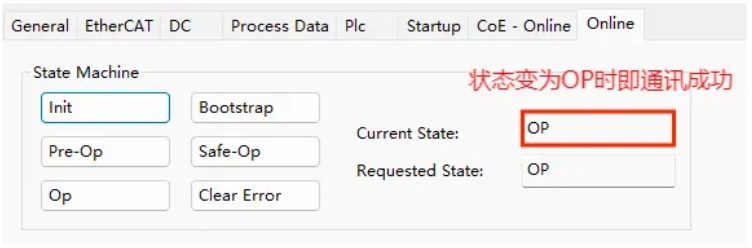
7、建立通訊
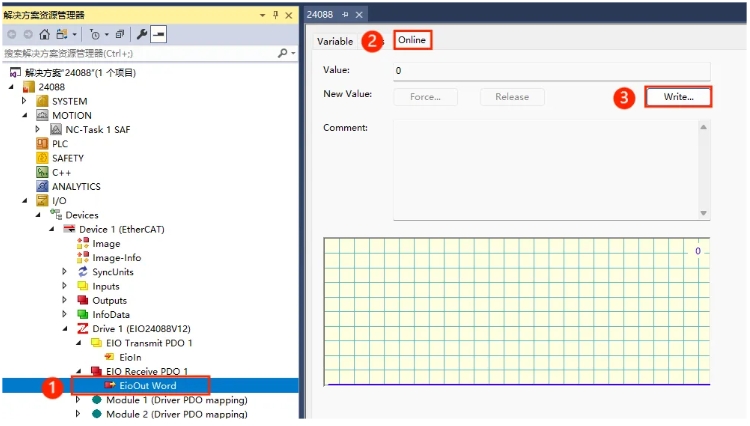
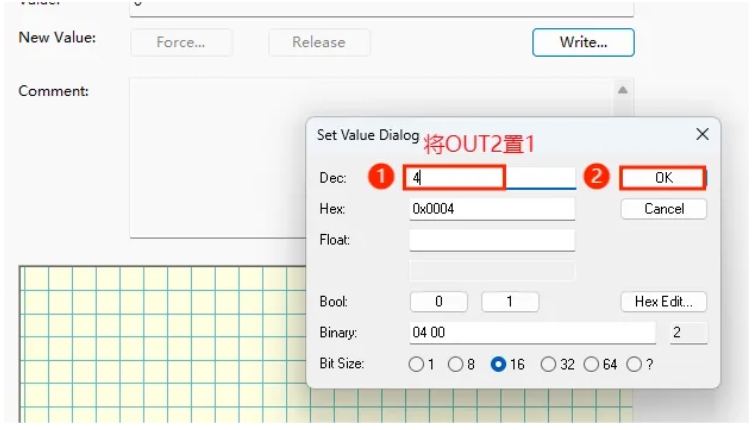
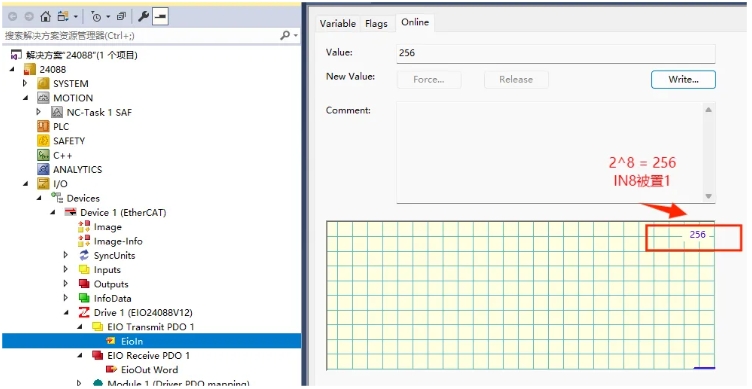
8、測試IO,將EIO24088G-V2的OUT2與IN8相連,通過TwinCAT將OUT2置1看IN8是否會隨之被置1
9、測試擴展的脈沖軸
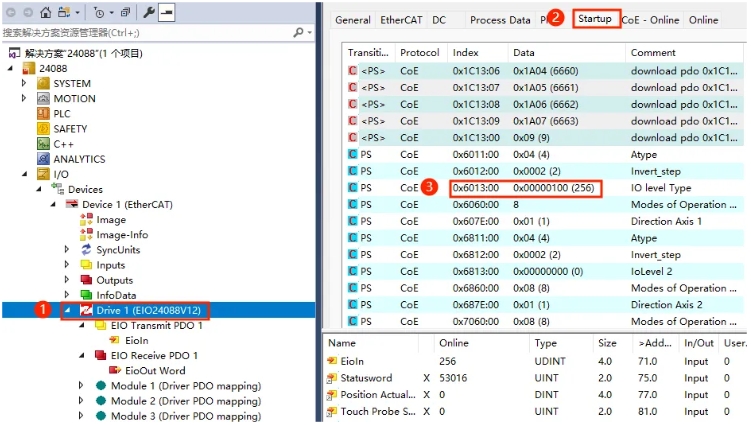
(1)找到StartUp配置,設置想使用自動使能的軸6013H數據字典設置成值256,想手動通過軸對應輸出口使能可將對應軸6013H數據字典設置成值0,軸1的6013H數據字典為6013H+ 1 * 800H。
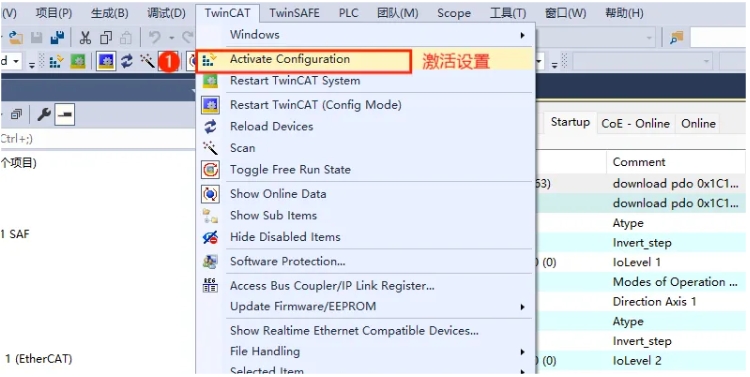
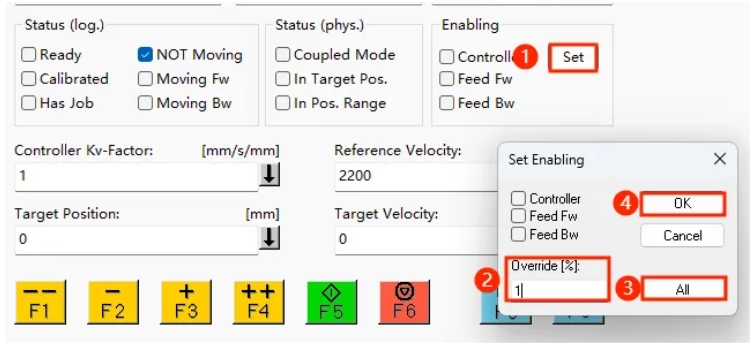
(2)重新激活一下配置,這個時候伺服使能斷開,EIO24088G-V2本地IO對應使能口置1;找到設置自動使能的軸,設置使能配置后(注意Override的值不能為0),Ready自動勾選,伺服使能,EIO24088G-V2本地IO對應使能口置0,軸0對應的OUT口為OUT8,軸1對應的OUT口為OUT9。
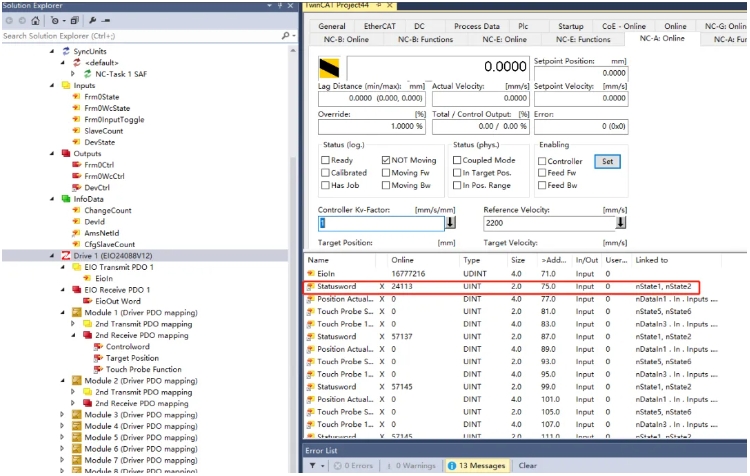
(3)使能后可以看到對應軸狀態字值變更,換算為使能狀態。
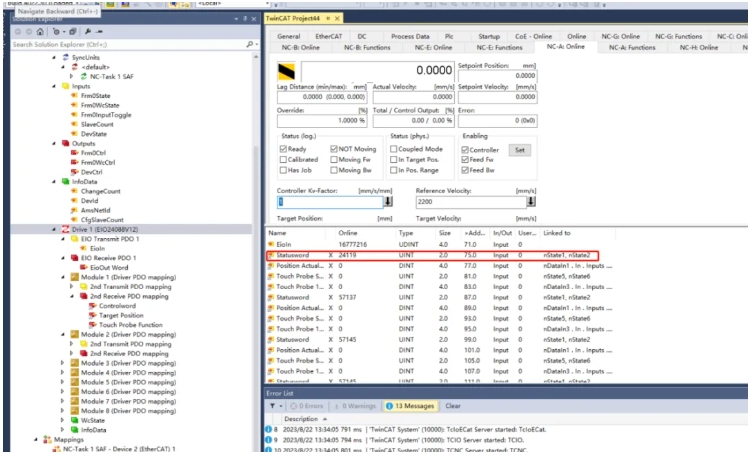
(4)把set參數勾選取消掉會掉使能,掉使能后可以也看到對應軸狀態字值變更,換算為掉使能狀態。
教學視頻可點擊→8軸/4軸的EtherCAT軸模塊EIO24088G-V2及EIO16084G的使用(一)TwinCAT總線配置與使用查看。
本次,正運動技術8軸/4軸的EtherCAT軸模塊EIO24088G-V2及EIO16084G的使用(一):TwinCAT總線配置與使用,就分享到這里。
更多精彩內容請關注“ 正運動小助手 ”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
401瀏覽量
24704 -
ethercat
+關注
關注
18文章
686瀏覽量
38674 -
正運動技術
+關注
關注
0文章
100瀏覽量
387
發布評論請先 登錄
相關推薦
擴展模塊EIO16084在運動控制系統中的應用


一種五軸伺服數控沖床數控系統
正運動技術EtherCAT擴展模塊接線參考以及使用流程

EtherCAT軸擴展模塊EIO16084在運動控制系統中的應用
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(四):板載IO與總線擴展IO的編碼器與脈沖配置的應用

EtherCAT PLC帶軸數的限制影響因素
8軸/4軸的EtherCAT軸模塊EIO24088-V2及EIO16084的使用(一):RTSys總線配置與使用






 工商網監
工商網監
評論