") 利用SoC FPGA的工業(yè)設計和電機控制
利用SoC FPGA的工業(yè)設計和電機控制
在工業(yè)系統(tǒng)中選擇器件需要考慮多個因素,其中包括:性能、工程變更的成本、上市時間、人員的技能、重用現(xiàn)有IP/程序庫的可能性、現(xiàn)場升級的成本,以及低功耗和低成本。
工業(yè)市場的近期發(fā)展推動了對具有高集成度、高性能、低功耗FPGA器件的需求。設計人員更喜歡網(wǎng)絡通信而不是點對點通信,這意味著可能需要額外的控制器用于通信,進而間接增加了BOM成本、電路板尺寸和相關NRE(一次性工程費用)成本。
總體擁有成本用于分析和估計購置的壽命周期成本,它是所有與設計相關的直接和間接成本的擴展集,包括工程技術成本、安裝和維護成本、材料清單(BOM)成本和NRE(研發(fā))成本等。通過考慮系統(tǒng)級因素有可能最大限度地減少總體擁有成本,從而帶來可持續(xù)的長期盈利能力。
美高森美公司(Microsemi)提供具有硬核ARM Cortex-M3微控制器和IP集成的SmartFusion2 SoC FPGA器件,它采用成本優(yōu)化的封裝,具有減少BOM和電路板尺寸的特性。這些器件具有低功耗和寬溫度范圍,能夠在沒有冷卻風扇的極端條件下可靠地運行。SmartFusion2 SoC FPGA架構將一個硬核ARM Cortex-M3 IP與FPGA架構相集成,可以實現(xiàn)更大的設計靈活性和更快的上市時間。美高森美為電機控制算法開發(fā)提供了具有多個多軸電機控制參考設計和IP的生態(tài)系統(tǒng),使由多處理器解決方案轉向單一器件解決方案(即SoC FPGA)更加容易。
影響TCO的因素
以下是影響系統(tǒng)TCO的一些因素。
(1)長壽命周期。FPGA可以在現(xiàn)場部署之后進行重新編程,這延長了產品的壽命周期,從而使設計人員能夠專注于新產品開發(fā),實現(xiàn)更快的上市時間。
(2)BOM.美高森美基于閃存技術的FPGA在上電時無需啟動PROM或閃存MCU來加載FPGA,它們是零級非易失性/即時啟動器件。與基于SRAM的FPGA器件不同,美高森美基于閃存的FPGA無需附加上電監(jiān)控器,這是因為閃存開關不會隨電壓而改變。
(3)上市時間。OEM廠商之間的激烈競爭迫切需要更多的產品差異化和更快的上市時間。經(jīng)過驗證的IP模塊可大幅縮短設計時間。目前已經(jīng)可以提供多個構建工業(yè)解決方案所需的IP模塊,同時更多的模塊正在開發(fā)中。SoC表現(xiàn)出的另一個獨特優(yōu)勢是可以用于調試FPGA設計。為了調試FPGA設計,可以通過用于調試的高速接口,利用微控制器子系統(tǒng)從FPGA中提取信息。
(4)工程工具成本。與FPGA開發(fā)工具昂貴的概念相反,美高森美提供用于FPGA開發(fā)的免費Libero SoC IDE,僅在開發(fā)高端器件時才需要付費。
工業(yè)驅動系統(tǒng)
工業(yè)驅動系統(tǒng)由一個電機控制器件和一個通信器件構成,電機控制器件包含了驅動逆變器的邏輯和保護邏輯,通信器件則使監(jiān)控控制能夠對運行時間參數(shù)進行初始化和修改。
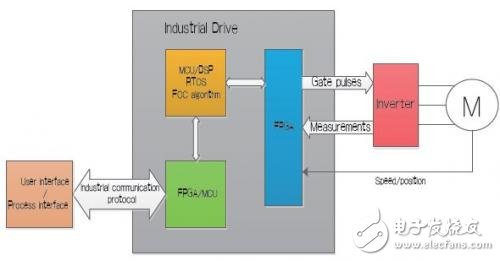
圖1:典型工業(yè)驅動系統(tǒng)。
在典型的驅動系統(tǒng)(圖1)中,可能使用多個控制器器件來實現(xiàn)驅動邏輯。一個器件可能執(zhí)行與電機控制算法相關的計算,第二個器件可能運行與通信相關的任務,第三個器件則可能運行與安全性相關的任務。
多軸電機控制
傳統(tǒng)上,工業(yè)電機控制應用使用微控制器或DSP來運行電機控制所需的復雜算法,在大多數(shù)傳統(tǒng)的工業(yè)驅動中,F(xiàn)PGA與微控制器或DSP一起使用,用于數(shù)據(jù)采集和快速作用保護。除了數(shù)據(jù)采集、PWM生成和保護邏輯,F(xiàn)PGA傳統(tǒng)上并未在實現(xiàn)電機控制算法方面發(fā)揮主要作用。
使用微控制器或DSP實現(xiàn)電機控制算法的方法并不容易擴展到多個以獨立速度運行的電機(多軸電機控制),美高森美SmartFusion2 SoC FPGA可以使用單一器件來實現(xiàn)集成且完整的多軸電機驅動控制(圖2)。
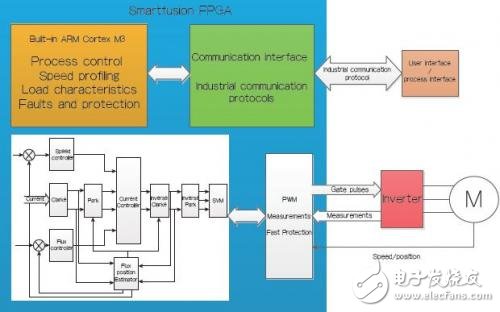
圖2:美高森美SmartFusion2 SoC FPGA使用單一器件來實現(xiàn)完整的多軸電機驅動控制。
控制方面可以分為兩個部分。一個部分用于運行磁場定向控制(FOC)算法、速度控制、電流控制、速度估計、位置估計和PWM生成;另一個部分則包括速度曲線、負載特性、過程控制和保護(故障和報警)。執(zhí)行FOC算法屬于時間關鍵型,需要在極高的采樣速率下進行(在微秒范圍),特別是針對具有低定子電感的高速電機。這使得在FPGA中實現(xiàn)FOC算法變得更優(yōu)越。過程控制、速度曲線和其他保護無需快速更新,因而能夠以較低的采樣速率執(zhí)行(在毫秒范圍),并且能夠在內置Cortex-M3子系統(tǒng)中進行編程。
晶體管開關周期在驅動中發(fā)揮著重要的作用,如果FOC回路執(zhí)行時間比開關周期短得多,硬件模塊可以重用于計算第二個電機的電壓。這意味著器件可以在相同的成本下提供更高的性能。
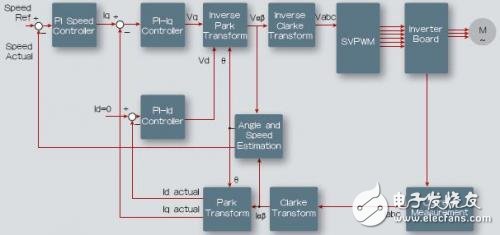
圖3:永磁同步電機的磁場定向控制(FOC)框圖。
(1)電機控制IP模塊。圖3為無傳感器磁場定向控制算法,這一部分將會討論這些模塊,它們作為IP核提供。
●PI控制器。比例積分(PI)控制器是用于控制系統(tǒng)參數(shù)的反饋機制,它具有兩個用于控制控制器動態(tài)響應的可調增益參數(shù)—比例和積分增益常數(shù)。PI控制器的比例分量是比例增益常數(shù)和誤差輸入的乘積,而積分分量是累積誤差和積分增益常數(shù)的乘積。這兩個分量被加在了一起。PI控制器的積分階段可能在系統(tǒng)中引起不穩(wěn)定,因為數(shù)據(jù)值不受控制地增加。這種不受控制的數(shù)據(jù)上升稱作積分飽卷,所有的PI控制器實現(xiàn)方案都包括一個抗飽卷機制,用于確保控制器輸出是有限的。美高森美的PI控制器IP模塊使用hold-on-saturation(保持飽和)算法用于抗飽卷。這個模塊還提供附加特性以設置最初的輸出值。
●磁場定向控制(FOC)。FOC是通過獨立地確定和控制轉矩和磁化電流分量來為電機提供最優(yōu)電流的算法。在永磁同步電機(PMSM)中,轉子已經(jīng)磁化。因此,為電機提供的電流只用于轉矩。FOC是計算密集型算法,但是美高森美電機控制參考設計已經(jīng)針對器件資源的最優(yōu)使用而構建。FOC算法包括Clarke、Park、逆Clarke和逆Park變換。
●角度估計。FOC的一個輸入是轉子角度。精確確定轉子角度對于確保低功耗是必不可少的。增添確定位置和速度的物理傳感器會增加系統(tǒng)的成本并降低可靠性。無傳感器算法有助于消除傳感器,但是增加了計算復雜性。美高森美針對無傳感器控制提供了兩個角度計算算法IP模塊—一個基于Luenberger觀測器,另一個基于直接反電動勢計算。該公司還提供基于霍爾傳感器和編碼器的單獨參考設計。
●PLL.PLL用于同步信號,在多個應用中有用,例如逆變器的角度估計和電網(wǎng)同步。
●速率限制器。速率限制器模塊可以實現(xiàn)系統(tǒng)變量或輸入的平滑改變。例如,在電機控制系統(tǒng)中,如果電機所需的速度突然改變,系統(tǒng)可能變得不穩(wěn)定。為了避免此類情形,速率限制器模塊用于從初始速度轉變到所需的速度。速率限制器模塊可以進行配置以控制改變的速率。
●空間矢量調制。空間矢量調制模塊改善了直流總線利用率,并消除了晶體管開關的短脈沖。因為晶體管開啟/關斷時間比脈沖持續(xù)時間長,短脈沖會導致不正確的開關行為。
●三相PWM生成。在所有計算的最后,可以得到三相電機電壓。這些電壓用于生成逆變器中晶體管的開關信號。PWM模塊為六個(三個高側和三個低側)晶體管產生開關信號,并且具有死區(qū)時間和延遲時間插入等先進特性。可編程的死區(qū)時間插入特性有助于避免逆變器引腳上的災難性短路情況。可編程的延遲時間插入特性使ADC測量與PWM信號生成能夠同步。該模塊可以配置成與僅由N-MOSFET組成的逆變器或同時包括N-MOSFET和P-MOSFET的逆變器一起工作。
(2)在SoC中調試FPGA設計。通常,在微控制器上調試設計比在FPGA上進行調試相對簡單一些。在SoC中,可以利用FPGA的高性能,同時保持在微控制器中更快速調試的優(yōu)勢。美高森美SmartFusion2 SoC FPGA中的微控制器子系統(tǒng)和FPGA架構可以通過AMBA APB或AXI總線彼此進行通信。這樣可以把測試數(shù)據(jù)注入FPGA架構中,或者從FPGA架構中記錄調試數(shù)據(jù),從而幫助實現(xiàn)運行時間的內部數(shù)據(jù)可視化,用于實時調試。固件代碼可以單步運行,在代碼中可以設置斷點來分析FPGA寄存器數(shù)據(jù)。
-
電機控制
+關注
關注
3534文章
1876瀏覽量
268752
發(fā)布評論請先 登錄
相關推薦
基于SoC FPGA進行工業(yè)設計及電機控制
一招教你設計SoC FPGA的工業(yè)和馬達控制?
通過FPGA提高工業(yè)應用靈活性的5種方法
工業(yè)設計是實現(xiàn)工業(yè)轉型升級的客觀條件
基于FPGA的系統(tǒng)提高電機控制性能
用于電機控制系統(tǒng)與設計(6)
SoC FPGA的電機控制IP模塊和經(jīng)過驗證參考設計
如何設計基于SoC FPGA的工業(yè)和馬達控制方案?
如何利用SoC FPGA進行工業(yè)設計及電機控制?
如何利用SoC FPGA進行工業(yè)設計及電機控制?
工業(yè)設計概論
控制算法與工業(yè)網(wǎng)絡的結合FPGA SoC加速馬達開發(fā)
基于ZYNQ SOC的電機控制及實例分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論