 美國自動綜合防撞系統飛行測試
美國自動綜合防撞系統飛行測試
自動綜合防撞系統飛行測試任務
飛行測試使用的兩架F-16戰斗機中,蓋伊乘坐的飛機作為“攻擊者”飛機,代號為“骷髏1號”,是第416飛行試驗中隊的一架50批次F-16戰斗機,試飛員是加拿大皇家空軍的交換軍官賈米勒·詹久阿(Jameel Janjua)少校,他是自動防撞技術戰斗機風險減縮項目的首席試飛員。
作為“目標”的F-16代號為“骷髏2號”,由美國空軍的試飛員布萊恩·凱利(Brian Kelly)少校駕駛,觀察員是來自空軍研究實驗室的專家凱文·普林斯(Kevin Price)中校(已退役)。在與“目標”飛機 “交戰”的過程中,“攻擊者”飛機將作為承擔更多動態的角色。
愛德華基地的自動綜合防撞系統測試團隊
任務的第一部分為重現幾個碰撞場景(包括迎頭飛過),以展示自動空中防撞系統如何在可接受的相對距離下在合適的時機接管控制權限。第二階段展示自動綜合防撞系統接近地面時的性能,包括通過山谷的“達標測試”。最后一部分是檢查飛機在做過激的基本作戰機動、重新編隊過程中以及超低空貼地飛行時是否符合預期目標。
為了保證安全,在較高飛行高度的測試中,研制人員視不同測試點的情況而在測試軟件中添加“禁區”,從而在特定方向上禁止系統觸發機動。但自動綜合防撞系統的算法無法感知這些區域,好像這些限制并不存在而繼續做判斷。
作為進一步的安全性措施,研制人員給參與測試的飛機設置了高度偏移,即飛機實際會飛行在不同的高度層上。然而,通過設置系統的算法會認為兩架飛機在同一高度,在機動激發時,會根據最佳規避方案發送飛機向上或向下移動的數值表示。“當靠近地面測試時,我們會大幅增加高度偏移并不設置禁區。這樣可讓飛機向任意需要的地方進行機動,”第416試飛中隊的自動綜合防撞系統項目領導人查爾斯·伊格(Charles Eger)表示。
在非加力最大推力下全速起飛后,飛機要進行過載感知機動和安全檢查,包括打開前后駕駛艙側桿上的寬柄開關,確保飛機激活自動綜合防撞系統。測試之前確認功能是否有效非常關鍵,它可以保證飛機處于一種正常狀態,即如果駕駛員沒有識別即將發生的碰撞并關閉這個開關來阻止防撞系統激活,或終止激活而做規避機動,那么飛機將會真的發生碰撞。與“骷髏2號”進入指尖隊形飛行后,需要校準高度來確保攻擊者與目標之間的高度表顯示差距在3m(10ft)內。雖然這是一個看似普通的步驟,但校準高度對這項任務而言很重要。
兩架測試飛機正在校準海拔,確保“攻擊者”與“目標”在系統上的高度差在3m(10ft)內
測試第一部分:雙機碰撞
測試的第一部分是兩架飛機在高度幾乎無差別的情況下,進行一系列的自動防撞機動。在6096m(20000ft)飛行的第一次測試,“骷髏1號”的起始位置在速度為555km/h(300kn)的“骷髏2號”下方1220m(4000ft)、后方60m(200ft),然后加速到722km/h(390kn)靠近“骷髏2號”,并保持一個翼展的距離。此時,由于事先進行過系統設置,自動空中防撞系統認為二者在同一高度而被激活,“骷髏1號”執行了一個躍升半外筋斗機動,而另一架F-16則向上拉起。“骷髏1號”的操縱者詹久阿表示,他在虛擬情況中試圖迎頭撞向“骷髏2號”,但在兩架飛機幾乎沒有高度差的情況下,不管出于什么原因,系統認為“骷髏2號”向上飛行而“骷髏1號”向下飛行更符合常理。
這項測試為系統設計者提供了該系統的量化數據:系統是否被激活、激活時機是否合適、反應是否足夠強烈亦或太早等。但無論如何,即使有高度偏移,當兩架機靠近到27m(90ft)時,兩者看起來近得可怕。詹久阿表示,“這讓人非常震驚,就算是一名已經飛行了多年的戰斗機飛行員,也不見得看到過任何飛機離自己那么近。”
接下來的測試是在6096m(20000ft)的高度,“骷髏1號”向左傾斜15°,以777km/h(425kn)的速度靠近,這個測試的規避動作是攻擊者飛機向左而目標飛機向右。之后還進行了第二次小角度交叉相遇,其中“骷髏2號”向“骷髏1號”飛機逼近,它高出60m(200ft)飛行,向左傾斜20°減速,并會在虛擬情況下與“骷髏1號”機頭相撞。第一次嘗試時,兩架飛機同時違反了禁區,因此盡管系統被激活了,但兩架飛機都沒有做機動。再次進行嘗試時,只有“骷髏2號”進行了一個滾轉接向右拉升的動作,而“骷髏1號”則又違反了“禁區”而沒有機動。
測試還包括了超聲速迎頭防撞場景。這個試驗要求非常高精度的飛行,對雙方試飛員的要求很高,兩架飛機分別爬升到9144m(30000ft)和9450m(31000ft)的高度并相距65km(40mile)。兩者都加速到Ma1.2,以Ma2.4的閉合速度快速掠過測試場。為了安全,在自動空中防撞系統中設置有290m(950ft)的高度偏移,但在虛擬情況中,兩架機要在一個翼展的距離上飛過對方,“骷髏1號”飛機出現系統的警告箭頭,飛機在即將接觸的瞬間執行了向右滾轉加5g轉彎的規避動作,“骷髏2號”從左側飛過。事后分析表明在虛擬情況下,兩架機對飛時相互之間的最小距離只有107m(352ft)。
這個試驗需要拋掉副油箱降低飛機載荷。研制人員稱,在目前的設計中,自動空中防撞系統和自動地面防撞系統在自動機動時不會受限于飛機的設計滾轉速率。然而,在飛行員主動激發自動規避時(打開手柄),如果在外部油箱內有燃油,則會限制滾轉速率。
出于安全因素,在防撞測試期間系統內置了高度偏移
測試第二部分:穿過山谷
測試的第二部分是在1500m(5000ft)高度以下進行的,第一步是在兩座大山間(加洛克山與骷髏山)演示迎頭對撞的場景。由于離地面太近,出于安全考慮將飛機的相對高度偏移增加到365m(1200ft),而兩架飛機在虛擬世界里仍在同一高度。隨著兩架機都以722km/h(390kn)的速度對飛,飛行員看到相撞警告箭頭出現并不斷靠近。當兩個箭頭看起來就要接觸時,“骷髏1號”繼續平直飛行,而“骷髏2號”做了個爬升機動。
在作戰訓練過程中,每架戰斗機上的自動防撞系統能隨時記錄下不同的飛行軌跡,但數據鏈在任一時刻只能傳輸三條飛行軌跡的數據。而戰斗機有9種規避動作可選,其中的7種是在不同傾斜角度的滾轉接拉升機動,一種是躍升半外筋斗,還有一種是保持原來的狀態什么也不做。因此,研制人員會考慮戰斗機的性能,基于幾何原理或飛行員的偏好,從可利用的機動中進行優先選擇。對飛行員來說,可以通過最小的努力避免一次碰撞,并不是兩架飛機全都要機動,“什么也不做”也是一種選擇。
在愛德華空軍基地試驗場,兩架F-16戰斗機于山谷內進行試驗時,其自動綜合防撞系統激活后兩架機之間的真實相對距離,這時并不考慮高度偏移。
當兩架飛機再次飛回山谷重復這一測試任務時,結果不同了。兩架飛機都向右傾斜并作5g的爬升轉彎。骷髏山的山峰突然在“骷髏1號”的右側閃現,但是綜合防撞系統立即意識到地形的威脅并使飛機與之保持安全距離。“當飛機繞過山峰并在山脈和另一架飛機之間飛行時,大片地形充斥著我們的視野,”詹久阿說,“那才是我們本質上想做的——努力讓該系統在飛機和地形之間做出選擇,而明智的選擇是對兩者都進行規避。”
第二步是評估系統對在山谷狹窄的邊界中接近并超越其他飛機的任務時的反應。在兩山之間,當“骷髏1號”飛機到達“骷髏2號”下方365m(1200ft)、后方1370m(4500ft)的位置時,前者加速到722km/h(390kn)并激發防撞系統。此時同樣系統認為兩架飛機在同一高度,它控制“骷髏1號”飛機向上飛行。然而在現實世界中,“骷髏2號”幾乎在“骷髏1號”的正上方,因此當規避機動被激發時,“骷髏1號”正快速逼近“骷髏2號”的機腹。飛行員詹久阿等到自動規避完成后,在聽到了測試點傳來的數據采集完畢提示音的同一瞬間,拉動寬柄扳手關閉了系統,重新取得了飛機的控制權,并做了個滾轉遠離了“骷髏2號”。
對此詹久阿表示,他在聽到提示音后,就表明已可在任意時刻拿回控制權。但即使對方飛機已近在咫尺,他也一直等到規避動作完成之后才扳動手柄。自動規避的最長時間是4.5s,但如果讓它持續那么長時間則無疑會撞到另一架飛機,因為兩架飛機的距離使相撞時間不足5s。但是他此前已在模擬器上飛行了太多遍,依據經驗判斷,留給他們為不讓相撞“得逞”而進行機動的時間大概是1~2s。
在一些更緊迫的情況下,如地形和另一架飛機都距你自身足夠近、且構成了威脅時,水平和垂直告警箭頭都會出現。水平箭頭表明自動地面防撞系統即將做出向上飛行的規避動作,空中防撞系統的箭頭是垂直的。在這次飛行測試中,雖然飛機飛過了山谷,但是機動設計時考慮了與地形間足夠的間隔,從而未出現自動地面防撞系統的箭頭。這表明了該綜合防撞系統會避免來自地形和另一架飛機的威脅同時出現。
隨著測試的進行,飛機的燃料不斷消耗,在伊莎貝拉湖區域與一架波音KC-135R進行了空中加油,每架F-16接受了1587kg(3500lb)的燃油,然后快速返回莫哈韋沙漠進行下一個測試任務。
測試第三部分:故障激發
測試的第三部分是考察在執行典型的基本戰斗機動和正常重新編隊期間,當飛行員動作太大或者錯誤操作時,該系統故障激發的易發性。本次測試將防撞系統置于不工作狀態,但當觸發防撞系統的情形出現時,仍能夠在耳機中給飛行員提供音頻警告。測試背景是在1500m(5000ft)的高度進行一系列航炮攻擊的場景。
第一種情形是小角度追蹤機動,當“骷髏2號”進入一個2g轉彎時,“骷髏1號”在非加力最大推力狀態650km/h(350kn)的速度跟隨它,并保持近距追蹤直到離前者180~210m,剛好在空軍空戰訓練的最小安全距離圈外(150m)。這種情形下并沒有聽到任何警告提示音。
第二種情形是“骷髏2號”減小轉彎半徑向“骷髏1號”切來,或者“強行拐彎”來縮小距離而增加方位角,拉4g的機動復制曾發生的空中相撞情景。“如果飛行員注意力不夠集中,或任務飽和,亦或視線固定在目標上時,做基本空中機動會容易出現問題,”詹久阿說,“嚴格地說,這種問題在經驗不足的飛行員中出現得較多,但經驗豐富的飛行員偶爾也會遇到。”這項測試是極其困難的,因為飛行員要將系統運行在標準訓練中允許飛行的邊界上而不觸發系統自動規避。
第三種情形是基本戰斗機動是其中最激進的一個,要保持小角度近距追擊。當兩架F-16的距離近到約400m(1300ft)時,“骷髏2號”進行一個360°螺旋閃避機動。“骷髏1號”為了近距離跟住前者,進行了螺旋式猛拉。在螺旋追擊的過程中,“骷髏1號”以805km/h(435kn)的速度接近目標,當距離縮短到115m(375ft)時,進入了允許的訓練圈內。“在‘骷髏2號’做逃逸機動時,我努力咬住它,通過持續追擊進入武器攻擊距離并保證安全脫離距離。這是另一個發生過空難的危險區域,有飛行員追得太猛導致空中相撞,”詹久阿說。從故障激發的角度看,這次試驗很成功,在整個任務過程中,飛行員的耳機沒有出現一聲告警音,這表明了該系統并未被激發。
試驗證明,盡管兩架戰斗機進入了空軍空戰訓練的最小安全距離圈(150m)內,自動綜合防撞系統也不會故障激發。
不發生故障激發的航炮追擊場景試驗對該系統能否被接受而言非常關鍵,它表明該系統不會妨礙戰斗機的正常操作。對在空戰中飛行的戰斗機飛行員來說,他們更愿意相信一個可信的系統,通過使用足夠長的時間來證明它能挽救他們和戰友的生命。就像自動地面防撞系統那樣,只有開始挽救生命,才會獲得投資。
在試驗后段,兩架飛機下降到離地約610m(2000ft),開始進行一系列重新編隊任務來測試更多可能發生故障激發的情況。“骷髏1號”以740km/h(400kn)的速度飛行,“骷髏2號”比它慢50kn,具體的重新編隊訓練包括一架飛機從外延軌跡采用躍升機動直線并入編隊、從戰術隊形直線并入編隊和一架飛機采用帶躍升機動的轉彎并入編隊。這一系列動作又在1220m(4000ft)高度進行了重復,其中“骷髏2號”報告在一些任務中聽到了警告提示音,這表明系統仍有一些軟件改進工作需要開展,以消除在某些地方的故障警告,但這不會成為部署該系統的阻礙。
測試任務的最后階段,由“骷髏1號”測試低空飛行的故障告警。飛機下降到90m(300ft)的高度,以一個低空飛行模擬戰術地形遮蔽和躲避以探測系統故障激發的威脅。當以833km/h(450kn)的速度在山谷地形上呈現為小點的矮灌木叢上方猛沖時,飛機的影子赫然出現。當飛機以僅僅75m(250ft)的距離切過一個山脊時,“注意高度,注意高度”的警告不斷發出,但是平顯上并未出現警告箭頭。這表明自動地面防撞系統是穩定的,即使以如此高的速度在這么低的高度下飛過山脊、平地或傾斜地形,系統也會等到即將撞上的時刻才激發。之后飛機返回了愛德華基地,結束了歷時2.7h的測試任務。
結論
美國空軍近期開展的這一系列飛行測試證明了自動綜合防撞系統不僅能夠大幅提升戰斗機飛行員的安全性,而且絕不會影響已經在40/50批次F-16上裝備的自動地面防撞系統的功能。
對于艱難地率先推進自動綜合防撞技術的美國空軍和工業界團隊來說,該項測試可稱為世界上第一個戰斗機全方位保護系統的決定性演示。
-
防撞系統
+關注
關注
0文章
9瀏覽量
7351 -
飛行測試
+關注
關注
0文章
3瀏覽量
1538
原文標題:美國空軍測試全球首個綜合空地防撞系統(下)
文章出處:【微信號:interavi,微信公眾號:國際航空】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
儲能逆變器自動測試系統的技術原理和應用
吉事勵繼電器自動測試系統:提升測試效率與精度

LED電源耐壓測試與性能測試的綜合分析

ATE自動測試設備原理及特點介紹

EV4000新能源汽車動力系統綜合測試儀

美國Merlin公司加速自主飛行模擬器開發
開關電源自動化測試系統如何簡化測試流程

城市綜合管廊火災自動報警系統設計與應用
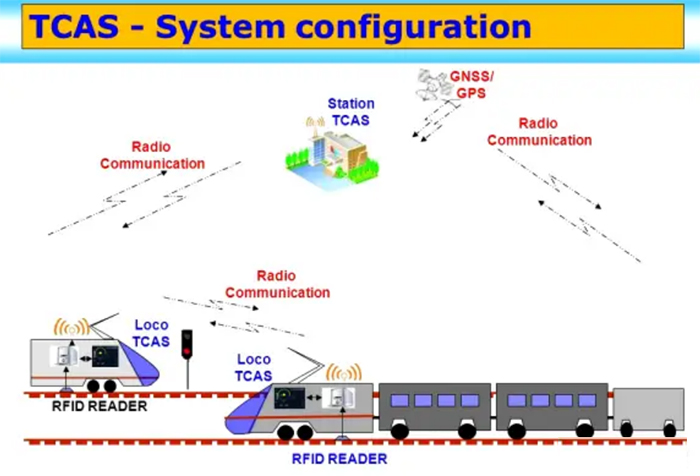
印度鐵路部門開發了RFID列車安裝防撞系統(TCAS)/Kavach
安科瑞變電站綜合自動化系統在青島海洋科技園應用





 工商網監
工商網監
評論