

導(dǎo)讀:
本文提出了一種動(dòng)態(tài)軌跡預(yù)測(cè)方法,通過結(jié)合歷史幀和歷史預(yù)測(cè)結(jié)果來提高預(yù)測(cè)的穩(wěn)定性和準(zhǔn)確性。它引入了歷史預(yù)測(cè)注意力模塊,以編碼連續(xù)預(yù)測(cè)之間的動(dòng)態(tài)關(guān)系,并通過三重因子注意力模塊實(shí)現(xiàn)了最先進(jìn)的性能。本方法能夠生成準(zhǔn)確且穩(wěn)定的未來軌跡,這對(duì)于自動(dòng)駕駛系統(tǒng)落地至關(guān)重要。??【深藍(lán)AI】編譯
01本文概要
在自動(dòng)駕駛中,精確預(yù)測(cè)道路智能體的未來軌跡至關(guān)重要。現(xiàn)有的方法主要采用了一種靜態(tài)的范式:通過固定長(zhǎng)度的歷史幀來預(yù)測(cè)未來的軌跡。然而,這些方法在相鄰時(shí)間戳中獨(dú)立進(jìn)行預(yù)測(cè),可能會(huì)引起預(yù)測(cè)的不穩(wěn)定性和不一致性。考慮到連續(xù)時(shí)間戳中的歷史軌跡大量重疊,預(yù)測(cè)結(jié)果應(yīng)當(dāng)展現(xiàn)出內(nèi)在的相關(guān)性,例如,重疊的預(yù)測(cè)軌跡應(yīng)保持一致,或者在不同的情況下,根據(jù)道路狀況共享相同的運(yùn)動(dòng)目標(biāo)。
基于這些考慮,作者提出了HPNet——一種創(chuàng)新的動(dòng)態(tài)軌跡預(yù)測(cè)方法。為了確保軌跡預(yù)測(cè)的穩(wěn)定性和準(zhǔn)確性,我們的方法不僅利用了包括地圖和智能體狀態(tài)的歷史幀,還考慮了歷史預(yù)測(cè)結(jié)果。具體來說,我們?cè)O(shè)計(jì)了一個(gè)全新的歷史預(yù)測(cè)注意力模塊,用于自動(dòng)捕捉連續(xù)預(yù)測(cè)之間的動(dòng)態(tài)關(guān)系。此外,該模塊通過利用歷史預(yù)測(cè),擴(kuò)大了注意力的范圍,使其超越了當(dāng)前可見的窗口。
作者提出的歷史預(yù)測(cè)注意力,結(jié)合智能體注意力和模式注意力,被整合為三重因子注意力模塊,構(gòu)成了HPNet的核心架構(gòu)。在Argoverse和INTERACTION數(shù)據(jù)集上的實(shí)驗(yàn)驗(yàn)證了HPNet的先進(jìn)性能,證明其能夠生成準(zhǔn)確且穩(wěn)定的未來軌跡預(yù)測(cè)。
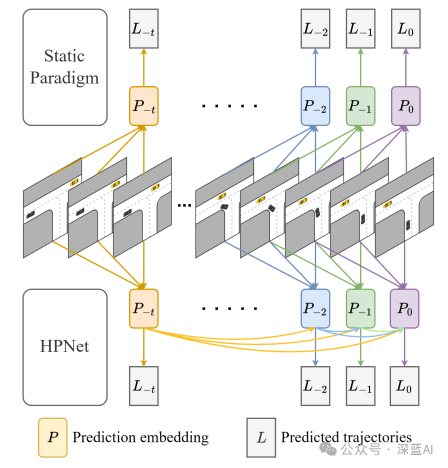
▲圖1|之前方法和作者的方法之間的差異。之前的方法(上方)將軌跡預(yù)測(cè)視為靜態(tài)任務(wù),基于固定長(zhǎng)度的歷史幀預(yù)測(cè)未來軌跡。它們即使在相鄰時(shí)間戳也獨(dú)立地進(jìn)行預(yù)測(cè),盡管輸入數(shù)據(jù)存在大量重疊。相反,HPNet(下方)將軌跡預(yù)測(cè)視為動(dòng)態(tài)任務(wù)。它不僅利用歷史幀,還使用歷史預(yù)測(cè)嵌入來進(jìn)行預(yù)測(cè)軌跡。??【深藍(lán)AI】編譯
02方法
本文提出的HPNet如下圖所示。本模型由三部分組成:時(shí)空上下文編碼、三重因子注意力和多模態(tài)輸出。首先,智能體和車道的時(shí)空特征與可學(xué)習(xí)的模式查詢聚合,以生成可以初步預(yù)測(cè)未來軌跡的預(yù)測(cè)嵌入。然后,進(jìn)行三重因子注意力處理,包括智能體注意力、歷史預(yù)測(cè)注意力和模式注意力,以精煉預(yù)測(cè)嵌入。其中,智能體注意力模擬智能體之間的互動(dòng),模式注意力模擬不同模式(即不同預(yù)測(cè)路徑)之間的互動(dòng),而歷史預(yù)測(cè)注意力是我們提出的一個(gè)新模塊,用于動(dòng)態(tài)地模擬當(dāng)前和歷史預(yù)測(cè)之間的內(nèi)在關(guān)聯(lián)。最后,通過多層感知器(MLP)解碼預(yù)測(cè)嵌入,以獲得預(yù)測(cè)軌跡,這些軌跡再次輸入整個(gè)流程,以提高未來預(yù)測(cè)的精確度。
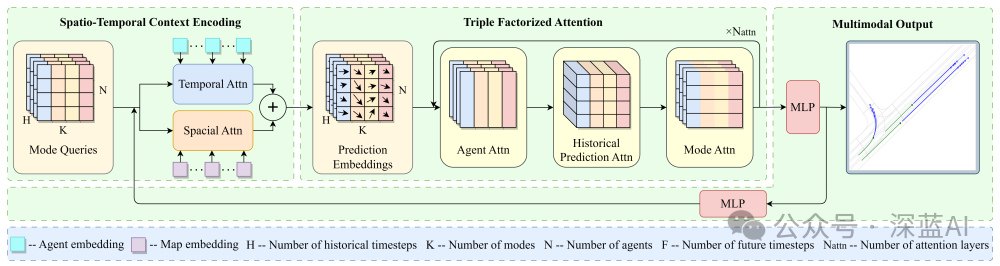
▲圖2|HPNet的概覽??【深藍(lán)AI】編譯
■2.1 時(shí)空上下文編碼模塊
●智能體特征編碼:將每個(gè)智能體在每個(gè)時(shí)間戳的位置、運(yùn)動(dòng)狀態(tài)、語(yǔ)義屬性等信息,通過兩個(gè)多層感知機(jī)(MLP)編碼成智能體節(jié)點(diǎn)嵌入。同時(shí)利用相對(duì)坐標(biāo)系提取運(yùn)動(dòng)方向等信息。
●道路特征編碼:將道路段的位置、長(zhǎng)度、屬性等信息,也通過兩個(gè)多層感知機(jī)(MLP)編碼成道路節(jié)點(diǎn)嵌入。此外,構(gòu)建道路節(jié)點(diǎn)之間的連接關(guān)系,如相鄰、前驅(qū)、后繼等。
●時(shí)空注意力:采用時(shí)間注意力和空間注意力兩個(gè)并行模塊。時(shí)間注意力用于聚合智能體的歷史時(shí)序信息,而空間注意力用于建模智能體與道路之間的交互。將這兩種注意力的結(jié)果相加,得到初始預(yù)測(cè)嵌入。
■2.2 三重因子注意力模塊
●智能體注意力:對(duì)每個(gè)時(shí)間戳和預(yù)測(cè)模式下的智能體節(jié)點(diǎn),進(jìn)行自注意力計(jì)算,以建模智能體間的相互影響。一方面,智能體注意力模型模擬了智能體在各自的時(shí)空上下文中的相互作用。另一方面,它也可以被視為不同智能體未來軌跡之間的相互作用,從而減少潛在的碰撞風(fēng)險(xiǎn)。
●歷史預(yù)測(cè)注意力:通過使用當(dāng)前預(yù)測(cè)嵌入與之前一段時(shí)間的所有預(yù)測(cè)嵌入進(jìn)行注意力計(jì)算,從而建模當(dāng)前預(yù)測(cè)與歷史預(yù)測(cè)之間的動(dòng)態(tài)關(guān)系。這不僅提高了預(yù)測(cè)的穩(wěn)定性和準(zhǔn)確性,還擴(kuò)大了注意力的范圍。而且歷史預(yù)測(cè)注意力模塊不需要額外的訓(xùn)練時(shí)間和推理開銷,僅通過注意力機(jī)制建模歷史預(yù)測(cè)信息。因此能夠在不增加復(fù)雜度的情況下提升模型性能。
●模式注意力:在前兩個(gè)注意力機(jī)制的基礎(chǔ)上,對(duì)不同預(yù)測(cè)模式之間進(jìn)行自注意力建模,進(jìn)一步增強(qiáng)多模態(tài)輸出的表達(dá)能力。它通過建模不同預(yù)測(cè)軌跡之間的相互影響,增強(qiáng)了模型對(duì)未來不確定性的理解能力,從而產(chǎn)生更加穩(wěn)定可靠的預(yù)測(cè)結(jié)果。
■2.3 多模態(tài)輸出模塊
經(jīng)過三重注意力機(jī)制優(yōu)化的預(yù)測(cè)嵌入,將通過多層感知機(jī)(MLP)解碼為多模態(tài)的未來軌跡。因?yàn)樵谧詣?dòng)駕駛等應(yīng)用場(chǎng)景中,智能體未來的行為存在很大不確定性,通過輸出多個(gè)可能的未來軌跡,而不是單一的預(yù)測(cè),可以更好地反映這種未來不確定性。
03結(jié)構(gòu)展示
作者在Argoverse和INTERACTION數(shù)據(jù)集上進(jìn)行了實(shí)驗(yàn),展示了其在動(dòng)態(tài)軌跡預(yù)測(cè)方面的先進(jìn)性能。
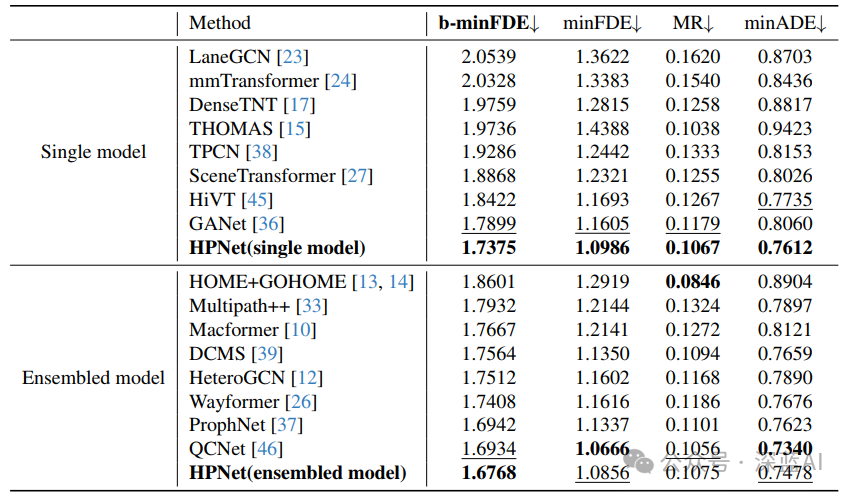
▲表1|與最先進(jìn)方法在Argoverse測(cè)試集上的性能比較,其中b-minFDE是官方排名指標(biāo)。對(duì)于每個(gè)指標(biāo),最佳結(jié)果以粗體顯示,次佳結(jié)果下劃線。??【深藍(lán)AI】編譯
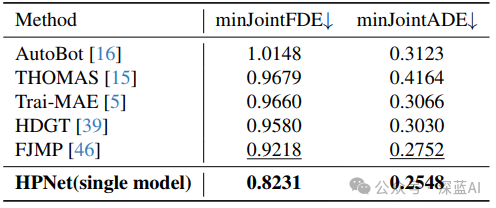
▲表2|與最先進(jìn)方法在INTERACTION測(cè)試集上的性能比較。對(duì)于每個(gè)指標(biāo),最佳結(jié)果以粗體顯示,次佳結(jié)果下劃線。??【深藍(lán)AI】編譯
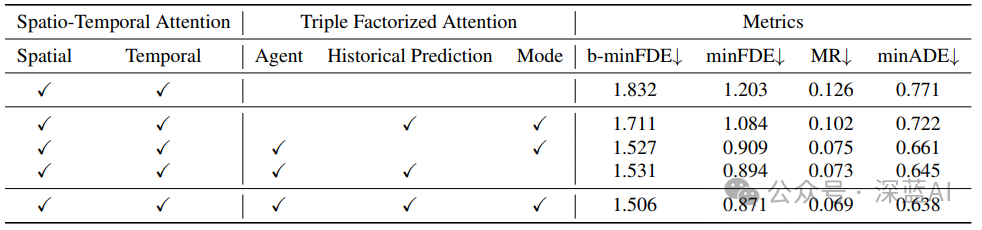
▲表3|三重因子注意力的消融實(shí)驗(yàn)。實(shí)驗(yàn)在Argoverse驗(yàn)證集上進(jìn)行。??【深藍(lán)AI】編譯
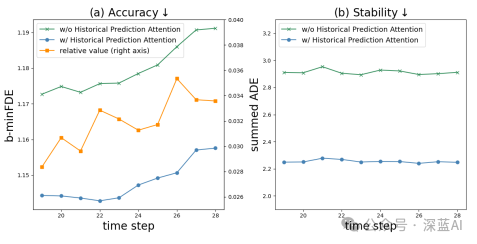
▲圖3|作者的HPNet和沒有歷史預(yù)測(cè)注意力的基線在Argoverse驗(yàn)證集上的預(yù)測(cè)準(zhǔn)確性(b-minFDE↓)和穩(wěn)定性(累計(jì)ADE↓)的比較。??【深藍(lán)AI】編譯
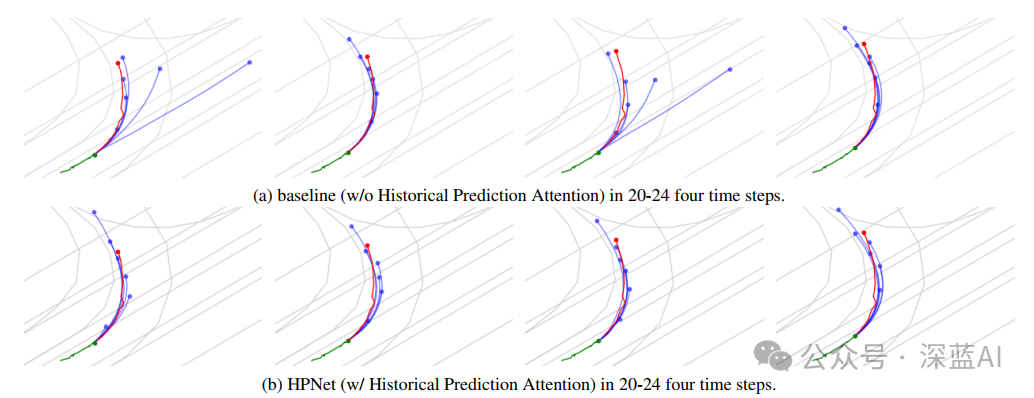
▲圖4|(a) 基線(b) HPNet。在Argoverse驗(yàn)證集上的定性結(jié)果。車道、歷史軌跡、ground truth軌跡和六個(gè)預(yù)測(cè)軌跡分別用灰色、綠色、紅色和藍(lán)色表示。??【深藍(lán)AI】編譯
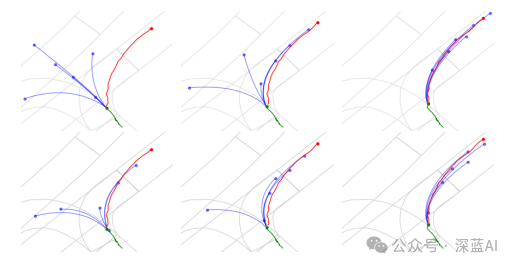
▲圖5|HPNet(下)和基線(上)的預(yù)測(cè)結(jié)果??【深藍(lán)AI】編譯
04總結(jié)
作者提出了一種新穎的動(dòng)態(tài)軌跡預(yù)測(cè)方法——HPNet。設(shè)計(jì)了一個(gè)歷史預(yù)測(cè)注意力模塊,用于模擬連續(xù)預(yù)測(cè)之間的動(dòng)態(tài)關(guān)系。它采用歷史預(yù)測(cè)嵌入來指導(dǎo)當(dāng)前預(yù)測(cè),使得預(yù)測(cè)軌跡更加準(zhǔn)確和穩(wěn)定。在Argoverse和INTERACTION數(shù)據(jù)集上的實(shí)驗(yàn)表明,作者提出的HPNet實(shí)現(xiàn)了最先進(jìn)的性能,并且還證明了歷史預(yù)測(cè)注意力模塊可以有效提高模型的準(zhǔn)確性和穩(wěn)定性。
-
模塊
+關(guān)注
關(guān)注
7文章
2778瀏覽量
49237 -
AI
+關(guān)注
關(guān)注
87文章
33788瀏覽量
274612 -
智能體
+關(guān)注
關(guān)注
1文章
243瀏覽量
10921 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14157瀏覽量
169091
原文標(biāo)題:創(chuàng)新的動(dòng)態(tài)軌跡預(yù)測(cè)方法: HPNet-生成準(zhǔn)確穩(wěn)定的未來軌跡!
文章出處:【微信號(hào):智能汽車電子與軟件,微信公眾號(hào):智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
一種復(fù)合故障預(yù)測(cè)動(dòng)態(tài)建模方法
一種基于實(shí)時(shí)航跡的流量預(yù)測(cè)修正算法
一種新的煤層氣產(chǎn)出動(dòng)態(tài)預(yù)測(cè)模型
一種用于高精度隨動(dòng)控制系統(tǒng)的軌跡預(yù)測(cè)方法_巫佩軍
一種動(dòng)態(tài)選擇加密方法

一種路網(wǎng)感知的在線軌跡壓縮方法

基于加權(quán)灰色GM模型的動(dòng)態(tài)軌跡預(yù)測(cè)算法
基于移動(dòng)模式匹配的目標(biāo)軌跡預(yù)測(cè)算法
一種軌跡差分隱私發(fā)布方法

關(guān)于一種基于動(dòng)態(tài)規(guī)劃的機(jī)動(dòng)目標(biāo)檢測(cè)前跟蹤方法
一種基于Frenet坐標(biāo)系的優(yōu)化軌跡動(dòng)作規(guī)劃方法
一種基于風(fēng)險(xiǎn)軌跡與復(fù)雜網(wǎng)絡(luò)的缺陷定位方法

基于增強(qiáng)動(dòng)態(tài)稠密軌跡特征的視頻布料材質(zhì)識(shí)別
一種基于自然語(yǔ)言的軌跡修正方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論