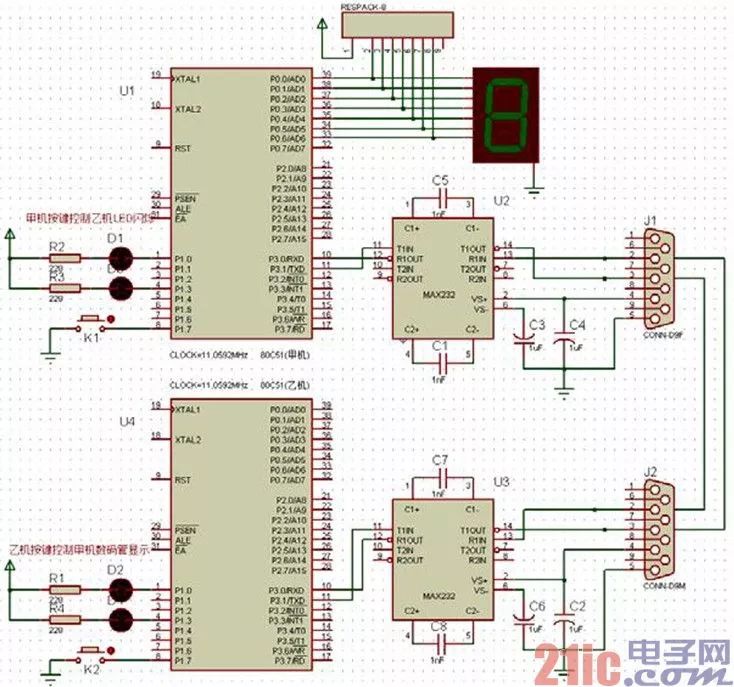
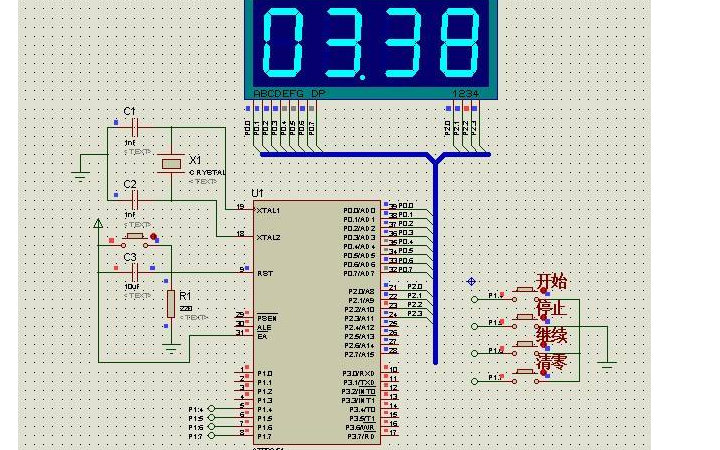
 甲機通過串口來控制乙機發送的數字顯示在數碼管上
甲機通過串口來控制乙機發送的數字顯示在數碼管上
名稱:甲機串口程序
說明:甲機向乙機發送控制命令字符,
甲機同時接收乙機發送的數字,并顯示在
數碼管上。
*/
#include
#defineucharunsignedchar
#defineuintunsignedint
sbitLED1=P1^0;
sbitLED2=P1^3;
sbitK1=P1^7;
ucharOperation_No=0;//操作代碼
//數碼管代碼
ucharcodeDSY_CODE[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
//延時
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//向串口發送字符
voidPutc_to_SerialPort(ucharc)
{
SBUF=c;
while(TI==0);
TI=0;
}
//主程序
voidmain()
{
LED1=LED2=1;
P0=0x00;
SCON=0x50;串口模式1,允許接收
TMOD=0x20;//T1工作模式2
PCON=0x00;波特率不倍增
TH1=0xfd;
TL1=0xfd;
TI=RI=0;
TR1=1;
IE=0x90;//允許串口中斷
while(1)
{
DelayMS(100);
if(K1==0)//按下K1時選擇操作代碼0,1,2,3
{
while(K1==0);
Operation_No=(Operation_No+1)%4;
switch(Operation_No)根據操作代碼發送A/B/C或停止發送
{
case0:Putc_to_SerialPort('X');
LED1=LED2=1;
break;
case1:Putc_to_SerialPort('A');
LED1=~LED1;LED2=1;
break;
case2:Putc_to_SerialPort('B');
LED2=~LED2;LED1=1;
break;
case3:Putc_to_SerialPort('C');
LED1=~LED1;LED2=LED1;
break; }
}
}
}
//甲機串口接收中斷函數
voidSerial_INT()interrupt4
{
if(RI)
{
RI=0;
if(SBUF>=0&&SBUF<=9)?P0=DSY_CODE[SBUF];
elseP0=0x00;
}
}
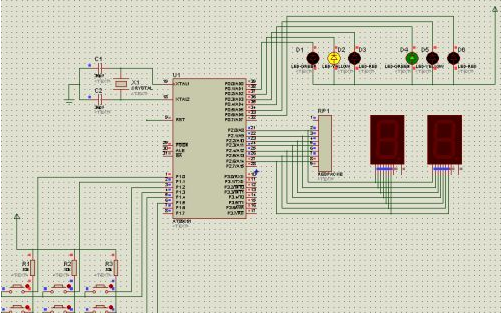
/*名稱:乙機程序接收甲機發送字符并完成相應動作
說明:乙機接收到甲機發送的信號后,根據相應信號控制LED完成不同閃爍動作。
*/
#include
#defineucharunsignedchar
#defineuintunsignedint
sbitLED1=P1^0;
sbitLED2=P1^3;
sbitK2=P1^7;
ucharNumX=-1;
//延時
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//主程序
voidmain()
{
LED1=LED2=1;
SCON=0x50;串口模式1,允許接收
TMOD=0x20;//T1工作模式2
TH1=0xfd;
TL1=0xfd;//波特率9600
PCON=0x00;波特率不倍增
RI=TI=0;
TR1=1;
IE=0x90;
while(1)
{
DelayMS(100);
if(K2==0)
{
while(K2==0);
NumX=++NumX%11;//產生0~10范圍內的數字,其中10表示關閉
SBUF=NumX;
while(TI==0);
TI=0;
}
}
}
voidSerial_INT()interrupt4
{
if(RI)//如收到則LED則動作
{
RI=0;
switch(SBUF)//根據所收到的不同命令字符完成不同動作
{
case'X':LED1=LED2=1;break;//全滅
case'A':LED1=0;LED2=1;break;//LED1亮
case'B':LED2=0;LED1=1;break;//LED2亮
case'C':LED1=LED2=0;//全亮
}
}
}
-
數碼管
+關注
關注
32文章
1882瀏覽量
91064 -
串口
+關注
關注
14文章
1551瀏覽量
76428
原文標題:單片機C語言程序設計:單片機之間雙向通信
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論