


什么是點云分割?
點云是世界的一種非結(jié)構(gòu)化三維數(shù)據(jù)表示,通常由激光雷達傳感器、立體相機或深度傳感器采集。它由一系列單個點組成,每個點由 x、y 和 z 坐標(biāo)定義。
點云分割將這些點聚類成表示環(huán)境中的表面、物體或結(jié)構(gòu)的不同語義部分。其目標(biāo)是根據(jù)在三維場景中代表的內(nèi)容將每個點分類到特定的對象類別中,例如“汽車”、“道路”、“建筑物”或“樹”。
為什么要對點云進行分割?
點云的語義分割使得機器能夠通過為點分配語義標(biāo)簽來感知和與其三維環(huán)境交互,從而促進對象識別、分類和跟蹤。由于先進的三維傳感器和深度學(xué)習(xí)算法,這種技術(shù)在準(zhǔn)確性和效率方面取得了顯著改進,從而在機器人技術(shù)、自動駕駛車輛和增強現(xiàn)實等領(lǐng)域開發(fā)了應(yīng)用。
分割使機器能夠區(qū)分關(guān)鍵對象,理解它們之間的關(guān)系,并推斷環(huán)境的整體結(jié)構(gòu)。這種語義解釋對于障礙物避免、路徑規(guī)劃和對象交互等任務(wù)至關(guān)重要。
分割將原始點云轉(zhuǎn)換為結(jié)構(gòu)化表示,使下游算法能夠分析和利用數(shù)據(jù)。
點云分割技術(shù)
研究人員已經(jīng)開發(fā)了各種算法方法來解決點云分割問題,每種方法都有其優(yōu)點和局限性。在本節(jié)中,我們將探討用于點云分割的一些最突出的技術(shù)。
區(qū)域增長算法:簡單而有效的方法區(qū)域增長方法從種子點開始迭代擴展,添加滿足特定幾何接近度或特征相似性標(biāo)準(zhǔn)的相鄰點。雖然這些算法簡單直觀,但其性能嚴(yán)重依賴于種子點的選擇和閾值調(diào)整。
聚類算法:
無監(jiān)督分組相似點像 k-means、DBSCAN 和 OPTICS 這樣的技術(shù)將分割視為一個無監(jiān)督的聚類問題,根據(jù)特征相似性將點分組。然而,它們對于集群形狀、密度和間隔做出了假設(shè),這些假設(shè)可能與實際環(huán)境不匹配。
基于圖的方法:
捕捉空間結(jié)構(gòu)和關(guān)系基于圖的方法通過將點云轉(zhuǎn)換為圖表示來捕捉三維數(shù)據(jù)的復(fù)雜空間結(jié)構(gòu)和關(guān)系。復(fù)雜的圖算法,例如歸一化割和條件隨機場(CRFs),可以識別語義簇。這些方法的主要局限性是需要大型點云的計算復(fù)雜度。
深度學(xué)習(xí)方法
深度學(xué)習(xí)已經(jīng)徹底改變了點云分割,實現(xiàn)了最先進的結(jié)果。架構(gòu),如 PointNet、PointNet++、圖卷積網(wǎng)絡(luò)(GCNs)和 PointCNN 已被提出來處理非結(jié)構(gòu)化的點云并直接學(xué)習(xí)高級語義特征。雖然這些方法強大,但它們具有高計算需求。
點云分割的應(yīng)用
點云分割正在通過使機器能夠以前所未有的方式感知和與其環(huán)境交互,從而改變各個行業(yè)。一些關(guān)鍵應(yīng)用及其影響如下:
物流和供應(yīng)鏈操作
在物流領(lǐng)域,點云分割支持一代新型的自動化系統(tǒng),能夠在復(fù)雜環(huán)境中進行導(dǎo)航和操作。倉庫、航運港口和聯(lián)運設(shè)施利用這項技術(shù)部署智能機器人、自動引導(dǎo)車(AGVs)和自動駕駛卡車,高效地移動貨物和材料。
通過精確分割和理解其周圍環(huán)境,這些自動化系統(tǒng)可以安全地穿過狹窄的過道、避開障礙物,并為最大效率優(yōu)化路線。點云分割還通過允許機器識別和分類不同類型的貨物,實現(xiàn)了自動裝卸和庫存管理。
醫(yī)療診斷和治療規(guī)劃
在醫(yī)療領(lǐng)域,點云分割改變了醫(yī)療專業(yè)人員可視化和分析患者數(shù)據(jù)的方式。激光雷達掃描和分割技術(shù)在牙科中創(chuàng)建了患者牙齒和口腔結(jié)構(gòu)的高度詳細的三維模型,使牙醫(yī)能夠識別病理變化、評估解剖特征并計劃精確的治療。
基于點云分割數(shù)據(jù)的疾病診斷算法研究(來源:https://arxiv.org/abs/2112.04863)
同樣,點云分割應(yīng)用于 MRI 和 CT 掃描等醫(yī)學(xué)成像模式,協(xié)助檢測、診斷和監(jiān)測各種疾病,包括腫瘤和異常情況。病變及其周圍組織的精確建模還有助于精確的治療,例如癌癥治療中的精確放療計劃。
基礎(chǔ)設(shè)施管理
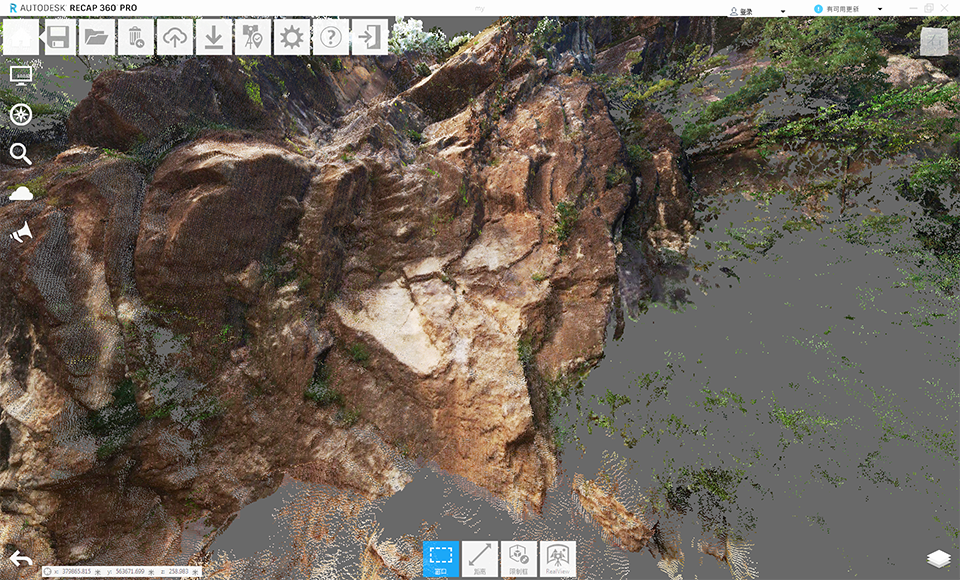
點云分割顯著影響基礎(chǔ)設(shè)施管理。通過將激光雷達技術(shù)與基于無人機的調(diào)查相結(jié)合,公司生成了關(guān)鍵資產(chǎn)(如基站、管道和鐵路)的高度詳細的三維點云。
測量和資產(chǎn)管理
通過分割,可以自動對這些點云進行分類和分析,以跟蹤資產(chǎn)狀況、識別潛在問題并確保符合安全法規(guī)。例如,將植被與基礎(chǔ)設(shè)施組件分割可以讓公用事業(yè)公司監(jiān)測清除距離,并防止?jié)撛诘幕馂?zāi)等危險。
建筑和采礦作業(yè)
在建筑和采礦領(lǐng)域,點云分割提高了重型機械操作員的情景感知和安全性。通過提供環(huán)境的詳細三維表示,這項技術(shù)使操作員能夠在復(fù)雜或狹窄空間中以更高的精度導(dǎo)航和定位設(shè)備,如挖掘機、自卸車和起重機。
分割算法可以檢測工人接近機械的情況,警報操作員,并防止?jié)撛谑鹿省T诖案劭诤丸F路場地,點云分割還通過精確控制處理集裝箱和貨物的起重機和機器臂來實現(xiàn)裝卸任務(wù)的自動化。
機器人技術(shù)
各個行業(yè)的自動移動機器人越來越依賴于點云分割來感知和導(dǎo)航周圍環(huán)境。從末端交付機器人到設(shè)施監(jiān)控和無接觸醫(yī)療助理,這項技術(shù)對于評估可穿越區(qū)域、避開障礙物并與物體和人員交互至關(guān)重要。
通過準(zhǔn)確地分割和理解環(huán)境,這些機器人可以安全、高效地執(zhí)行任務(wù),例如倉儲、工業(yè)檢查、衛(wèi)生和醫(yī)療用品交付。點云分割使得可以在各種環(huán)境中部署自動系統(tǒng),推動各個領(lǐng)域的創(chuàng)新和效率。
結(jié)論
點云分割正在改變各個行業(yè),并使機器能夠以前所未有的方式感知和與世界交互。從自動化物流操作到推進醫(yī)療診斷和賦予自動系統(tǒng)的能力,這項技術(shù)正在推動效率、安全性和創(chuàng)新的顯著改進。
-
傳感器
+關(guān)注
關(guān)注
2567文章
53077瀏覽量
768173 -
算法
+關(guān)注
關(guān)注
23文章
4713瀏覽量
95524 -
三維
+關(guān)注
關(guān)注
1文章
518瀏覽量
29507 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5562瀏覽量
122850
原文標(biāo)題:一文讀懂三維點云分割
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于深度學(xué)習(xí)的三維點云配準(zhǔn)方法
三維快速建模技術(shù)與三維掃描建模的應(yīng)用
基于三維模型球型分割的信息隱藏算法
彩色分割立體匹配的三維目標(biāo)快速重建
計算機視覺:三維點云數(shù)據(jù)處理學(xué)習(xí)內(nèi)容總結(jié)
基于深度學(xué)習(xí)的三維點云語義分割研究分析
基于聚類分析的三維網(wǎng)格分割技術(shù)綜述

點云的概念以及與三維圖像的關(guān)系

基于三維激光點云的目標(biāo)識別與跟蹤研究
基于三維激光點云的目標(biāo)識別與跟蹤研究

三維點云數(shù)據(jù)的兩種結(jié)構(gòu)Kdtree和Octree
什么樣的點可以稱為三維點云中的關(guān)鍵點呢?
點云分割技術(shù)的發(fā)展現(xiàn)狀及挑戰(zhàn)
只要MLP就能實現(xiàn)的三維實例分割!

泰來三維|三維掃描服務(wù)_三維激光掃描儀測量山體滑坡點云建模





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論