") 電機速度檢測技術(shù)原理介紹及其案例詳解
電機速度檢測技術(shù)原理介紹及其案例詳解
當(dāng)電機在汽車傳動應(yīng)用中使用時,最令人感興趣的特性之一是它們還能用作發(fā)電機,因而在剎車時可以給汽車電池充電。Roboteq公司的電機控制器可以通過方便地編程充分利用這個特性以受控和漸進(jìn)的方式實現(xiàn)再生制動。
本文討論了使用電機速度檢測這種簡單且非常高效的技術(shù)背后的原理,并介紹了使用與Roboteq控制器連接的無刷電機的一個實際例子。
既是電動機又是發(fā)電機
電機的簡化模型是一個電阻串聯(lián)一個電感和一個電壓發(fā)生器。電阻和電感就是電機內(nèi)部電磁部件的電阻和電感。電壓發(fā)生器代表電機在轉(zhuǎn)動時由電機本身產(chǎn)生的電壓,一般稱為反向電動勢,簡寫為BEMF.BEMF電壓是一個固定的電壓轉(zhuǎn)速比值(V/RPM)。
能夠使用Roboteq無刷電機控制器實現(xiàn)漸進(jìn)式再生制動的實驗性電動踏板車。
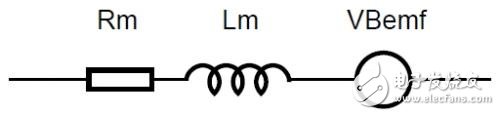
圖1:電動機模型。
當(dāng)給處于機械鎖定狀態(tài)的電機加電時,模型實際上可以簡化為一個兩端連接電池的電阻,測得的電流值為I=VBat/Rm.電感只是影響電壓加上瞬間的電流,如果電壓保持恒定這種影響會消失。
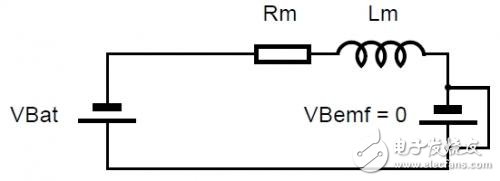
圖2:當(dāng)電機停轉(zhuǎn)時的等效電路。
如果電機允許旋轉(zhuǎn),那么它將產(chǎn)生正比于旋轉(zhuǎn)速度的BEMF電壓。此時的模型是一個電阻加上分別位于電阻兩端的發(fā)電器。電阻上的最終電壓等于電池電壓減去BEMF,電流則為I = (VBat - VBemf) / Rm.在實際應(yīng)用中,這意味著隨著電機轉(zhuǎn)速的提高,電流會減小。
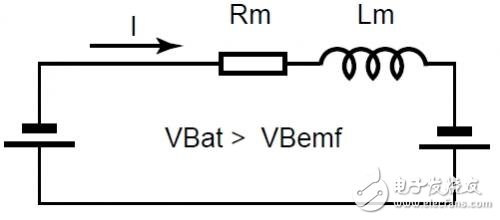
圖3:加速狀態(tài)。
如果電機轉(zhuǎn)速可以足夠快到BEMF等于電池電壓,兩個電壓源將相互抵消,電阻上的等效電壓為0,此時電池將沒有電流流出。在實際應(yīng)用中這種情況是不會發(fā)生的,因為這意味著電機沒有一點扭矩,而克服摩擦力總是需要一定的扭矩。
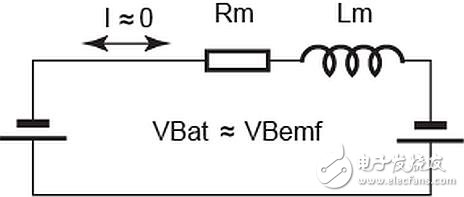
圖4:無負(fù)載或摩擦力時的穩(wěn)定速度。
在實際應(yīng)用中,當(dāng)BEMF達(dá)到產(chǎn)生扭矩的電池電流足以克服摩擦力和電機機械負(fù)載時電機速度將趨于穩(wěn)定。
然而,如果電機被外力驅(qū)動(例如汽車下坡),旋轉(zhuǎn)會導(dǎo)致實際的BEMF等于VBat,此時不會有一點電流流動。如果此時電機以更快速度旋轉(zhuǎn),BEMF會變得大于電池電壓,我們將看到電流從電機流向電池,這時系統(tǒng)就處于重新發(fā)電(再生)狀態(tài)。
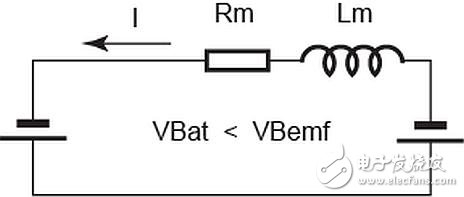
圖5:再生制動狀態(tài)。
PWM開關(guān)型電壓源效應(yīng)
目前為止我們假設(shè)是用一個固定電壓電池直接連到電機上,從中我們可以看出,在恒定負(fù)載情況下,可以通過改變電池電壓來控制速度。
在現(xiàn)代控制器中,改變電壓是通過使用呈半橋(單向)或全橋(雙向)結(jié)構(gòu)的功率MOSFET晶體管并以近20kHz的很快速度開關(guān)電機電源來實現(xiàn)的。這種橋有一個底部的MOSFET和一個頂部的開關(guān),它們以互補的方式(底部導(dǎo)通時頂部斷開,底部斷開時頂部導(dǎo)通)正常工作。
當(dāng)與電機的電感結(jié)合在一起時,這種開關(guān)會使得控制器行為就像一個數(shù)值正比于開關(guān)導(dǎo)通/斷開占空比的可調(diào)電壓源。例如,當(dāng)一半時間導(dǎo)通一半時間斷開時,電路等效于一半電池電壓的發(fā)電機。
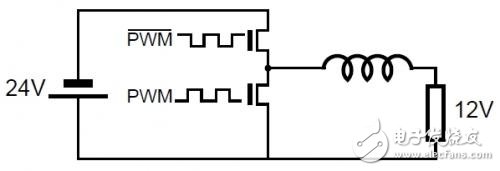
圖6:50% PWM的步降轉(zhuǎn)換。
這個效應(yīng)在相反方向也成立。如果沒有連接電池,同時電機又被驅(qū)動產(chǎn)生電壓,那么PWM開關(guān)和電機電感在50% PWM時將作為升壓器使電壓翻倍。這種升壓效應(yīng)很好地解釋了為何電機轉(zhuǎn)速很慢而BEMF又小于電池電壓時再生現(xiàn)象是如何發(fā)生的。
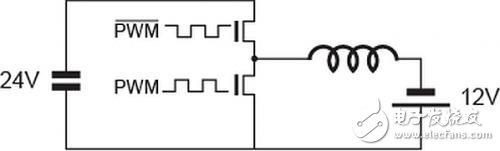
圖7:50% PWM時的步升轉(zhuǎn)換。
-
電動機
+關(guān)注
關(guān)注
75文章
4134瀏覽量
97417 -
發(fā)電機
+關(guān)注
關(guān)注
26文章
1664瀏覽量
68440
發(fā)布評論請先 登錄
相關(guān)推薦
UPS電磁兼容性能及其檢測技術(shù)介紹
永磁同步電機精確瞬時速度檢測
步進(jìn)電機驅(qū)動控制技術(shù)及其應(yīng)用設(shè)計研究
移動機器人相關(guān)技術(shù)及其定位傳感器的設(shè)計與詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論