 詳細解析如何整定調節系統的PID參數
詳細解析如何整定調節系統的PID參數
一 調節器正/反作用的確定方法
調節系統投自動:往往在控制方案確定好且判斷出調節器的正/反作用后,最關鍵的是P、I、D參數如何整定,根據多年的現場工作經驗,談談如何整定調節系統的P、I、D參數,請大家在工程中參考。
在整定調節系統的P、I、D參數前,要保證一個閉環調節系統必須是負反饋,即Ko*Kv*Kc>0。

調節對象Ko:
閥門、執行器開大,測量PV增加,則Ko>0;反之,則Ko<0;
調節閥門Kv:
閥門正作用(氣開、電開),則Kv>0;閥門反作用(氣關、電關),則Kv<0;
Ko、Kv的正負由工藝對象和生產安全決定,根據Ko、Kv的正負和Ko*Kv*Kc>0,我們可以確定Kc的正負;
調節器Kc:
若Kc>0,則調節器為反作用;若Kc<0,則調節器為正作用;軟件組態中要設置正確,在裝置調試和開車及P、I、D參數整定前,調節器的正/反作用務必檢查,且正確無誤。
1、在整定調節系統的P、I、D參數前,要保證測量準確、閥門動作靈活;
2、在整定調節系統的P、I、D參數時,打好招呼,要求用戶工藝操作密切注意生產運行狀況,確保安全生產;
3、在整定調節系統的P、I、D參數時,先投自動后串級,先投副環后主環,副環粗,主環細。在操作站CRT上,打開調節器的整定調整畫面窗口,改變給定值SP或輸出值OP,給出一個工藝允許的階躍信號,觀察測量值PV變化和趨勢圖,不斷修定PID參數,往往反復幾次,直至平穩控制。實際中,一般能達到工藝滿意的一階特性即可。
二 經驗PID整定參數預置
對介質為流體(氣體、液體)情況,經驗PID整定參數參考如下,(在出所前最好在軟件組態中要設置好,到現場再細調或不動):
1、對流量調節(F):
一般P=120~200%,I=50~100S,D=0S;
對防喘振系統:一般P=120~200%,I=20~40S,D=15~40S;
2、對壓力調節(P):
一般P=120~180%,I=50~100S,D=0S;
對放空系統:一般P=80~160%,I=20~60S,D=15~40S;
3、對液位調節(L):
1]、大容器(直徑4米、高2米以上塔罐):一般P=80~120%,I=200~900S,D=0S;
2]、中容器(直徑2--4米、高1.5--2米塔罐):一般P=100~160%,I=80~400S,D=0S;
3]、小容器(直徑2米、高1.5米以下塔罐):一般P=120~300%,I=60~200S,D=0S;
4、對溫度調節(T):
一般P=120~260%,I=50~200S,D=20~60S;
上述參數是經驗性的東西,不是絕對的。另外實際中,有時一個調節系統工藝過程對象或閥門(定位器)存在問題,也能靠改變PID參數予以克服,使自動投入。投自動需要耐心觀察、不斷修正。實踐中能否投入自動,最關鍵的是閥門(定位器)、執行器好用,動作靈活。
在一個串級調節系統(例如:有2個調節器)中,整個內環(副調,其Ko1*Kv1*Kc1>0)相當于主環的Kv,它始終為正。PID參數整定的結果:觀察曲線,一般為一階特性即可(當然理論上為二階衰減特性)。
三 自動回路投入注意事項
1、基本原則:
裝置在運行時自動回路的投入應保證各工段的平穩運行,主要參數不能出現較大的波動,其它輔助設備的壓力、液位、溫度等參數也不能出現影響裝置正常運行的過大波動。
2、同工藝操作人員的配合:
自動回路的投入屬于自動化改造工程調試工作。若是我方人員負責投自動回路,在進行此項工作時,應先向用戶操作人員講清我方的工作內容,需要工藝操作人員如何配合,有何影響及出現意外情況應如何處理,調試結束后應通知工藝操作人員。自動回路首次投入前應要求工藝操作人員將該部分工況盡量調至相對穩定狀態。
3、控制系統具體注意事項:
(1)所有自動回路的組態在出所前都應經過嚴格測試。若其組態在現場有改動,在投入自動前應仔細檢查組態的信號流向及邏輯的正確性,信號切換部分要注意切換邏輯的時序問題。組態應做到自動回路至現場的出口有可做人工干預的簡單邏輯部分,以便萬一有組態錯誤可以人工停止自動回路對現場的作用。
(2)投自動時可先將PID模塊的比例帶、積分時間的數值放大,將PID模塊輸出上限、輸出下限放至PID模塊當前跟蹤輸出值附近的一個可允許變動范圍內,將PID模塊輸出變化率放小。投入自動后,觀察PID模塊的動作方向是否正確,PID模塊輸入偏差的變化是否在正常范圍之內,確認后再將PID模塊的幾種輸出限制相繼放開,恢復其正常作用,再根據調節品質調節PID模塊各項的參數。
四 PID參數整定方法
1、基礎知識
在自動調節系統中,E=SP-PV。其中,E為偏差、SP為給定值、PV為測量值。當SP大于PV時為正偏差,反之為負偏差。
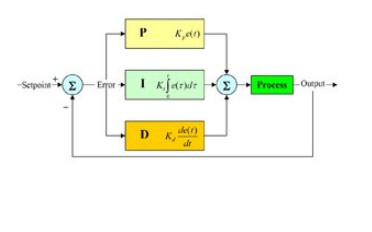
1)比例調節作用的動作與偏差的大小成正比;當比例度為100時,比例作用的輸出與偏差按各自量程范圍的1:1動作。當比例度為10時,按10:1動作。即比例度越小,比例作用越強。比例作用太強會引起振蕩。太弱會造成比例欠調,造成系統收斂過程的波動周期太多,衰減比太小。其作用是穩定被調參數。
2)積分調節作用的動作與偏差對時間的積分成正比。即偏差存在積分作用就會有輸出。它起著消除余差的作用。積分作用太強也會引起振蕩,太弱會使系統存在余差。
3)微分調節作用的動作與偏差的變化速度成正比。其效果是阻止被調參數的一切變化,有超前調節的作用。對滯后大的對象有很好的效果。但不能克服純滯后。適用于溫度調節。使用微分調節可使系統收斂周期的時間縮短。微分時間太長也會引起振蕩。
2、整定方法
經驗法是簡單調節系統應用最廣泛的整定方法,是一種試湊法。它通過參數預先設置和反復試湊來實現。參數的預置值要根據對象的特性和儀表的量程決定。儀表量程大的PID參數要適當加強作用。四類被調參數的一般范圍如下:

臨界比例度法是采用純比例將系統投入自動,此時積分時間放最大,微分時間放0。逐漸減小比例度,使系統剛剛出現等幅振蕩,記下這時的比例度Pbc和振蕩周期Tc,然后按下式計算PID的比例度和積分時間:P=2.2Pbc;T=0.85Tc。實際情況可能超出此范圍。
對于純滯后時間和時間常數較大的對象,MACS的PID不宜使用臨界比例度法,其較難找到Pbc。
-
DCS
+關注
關注
20文章
616瀏覽量
50561 -
PID
+關注
關注
37文章
1476瀏覽量
86239 -
參數
+關注
關注
11文章
1865瀏覽量
32573
原文標題:DCS控制系統中PID參數
文章出處:【微信號:gongkongworld,微信公眾號:工控資料窩】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論