 基于旋轉平移解耦框架的視覺慣性初始化方法
基于旋轉平移解耦框架的視覺慣性初始化方法
來源:3D視覺工坊
1. 導讀
精確和魯棒的初始化對于視覺慣性里程計(VIO)至關重要,因為不良的初始化會嚴重降低姿態精度。在初始化期間,估計諸如加速度計偏差、陀螺儀偏差、初始速度和重力等參數是至關重要的。IMU傳感器需要精確估計陀螺儀偏差,因為陀螺儀偏差會影響旋轉、速度和位置。現有的VIO初始化方法大多采用運動結構法來解決陀螺漂移問題。然而,SfM在快速運動或退化場景中不夠穩定和有效。為了克服這些限制,我們通過添加新的不確定性參數和優化模塊來擴展旋轉-平移-解耦框架。首先,我們采用一種陀螺儀偏置優化器,它結合了概率法向極線約束。其次,我們融合IMU和視覺測量來有效地求解速度、重力和比例。最后,我們設計了一個額外的細化模塊,有效地減少重力和比例誤差。在EuRoC數據集上的大量初始化測試表明,我們的方法將陀螺儀偏差和旋轉估計誤差分別平均降低了16%和4%。它還顯著降低了重力誤差,平均降低了29%。
2. 引言
視覺慣性里程計(VIO)旨在在各種未知環境中估算相機的位置。它通過融合來自相機的圖像信息和來自慣性測量單元(IMU)傳感器的IMU測量數據來實現這一目標。相機可以估計視覺地圖并減少姿態漂移。IMU傳感器為相機運動提供度量尺度,并具備短期魯棒性。VIO具有諸多優勢,如體積小、成本低、功耗低。這些特性使得VIO在虛擬現實、增強現實和自動化機器人等領域的應用日益廣泛。
為了有效運行VIO系統,必須在初始化階段準確估計一組參數。這些參數包括尺度、重力方向、初始速度和加速度計及陀螺儀的偏差。初始化不正確將導致收斂性差和系統其他參數估計不準確。另一方面,快速初始化也很重要,因為VIO系統必須在IMU正確初始化后才能工作。
基本上,以往的VIO初始化工作可分為緊耦合和松耦合方法。緊耦合方法假設相機的姿態可以通過IMU測量進行近似。它們將視覺觀測與IMU積分相融合,并通過封閉形式的解來估計初始化參數,這可能會增加計算成本。此外,這些方法通常忽略陀螺儀偏差,這可能會影響準確性。松耦合方法假設通過視覺結構從運動恢復(SfM)獲得的相機軌跡非常準確。首先,它們解決視覺SfM問題,并根據得出的相機姿態初始化慣性參數。因此,這些方法的準確性在很大程度上依賴于視覺SfM的性能。然而,在相機快速運動或共同特征點太少的情況下,視覺SfM可能會變得不穩定。
總體而言,緊耦合和松耦合方法都未能充分利用相機和IMU之間的互補信息。具體而言,緊耦合方法未利用視覺觀測來估計陀螺儀偏差,這可能會導致數值穩定性問題和準確性降低。松耦合方法未使用IMU測量來增強視覺SfM的穩定性,從而在具有挑戰性的運動場景中導致準確性低或初始化失敗。受圖像觀測可直接用于優化圖像幀之間旋轉的啟發[12],提出了一種旋轉-平移解耦的VIO初始化方法。該方法增強了視覺觀測與IMU測量之間的聯系。然而,這種方法忽略了圖像特征匹配的質量。在最終結果中,每個匹配都被賦予相同的權重。盡管已從特征匹配中去除異常值,但2D特征對應點的誤差分布隨圖像內容和具體匹配技術而變化。因此,考慮2D特征匹配的不確定性至關重要。
3. 效果展示
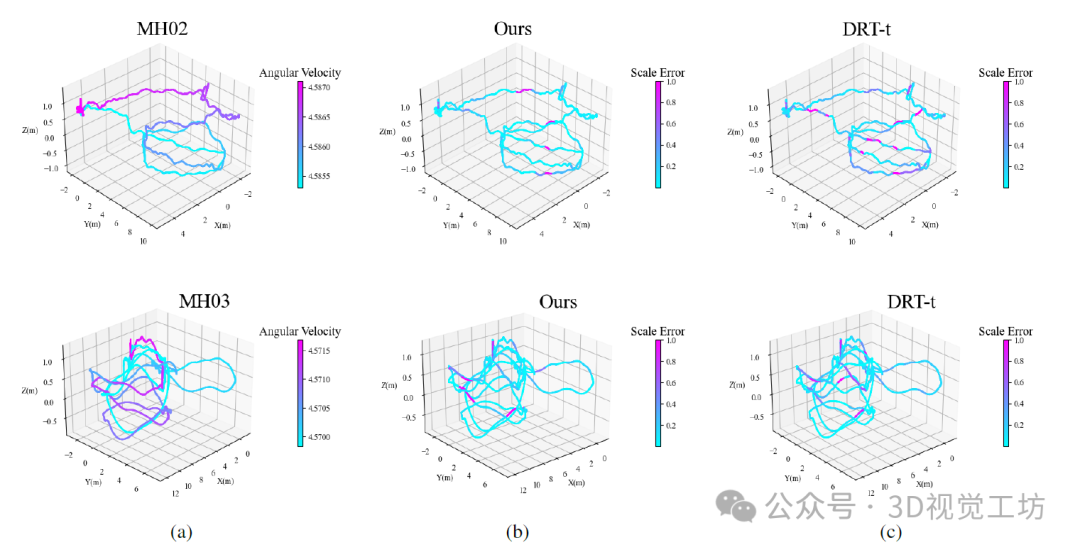
MH02數據集和MH03數據集的角速度和標度誤差可視化。第一行圖像是MH02,第二行圖像是MH03。列(a)顯示了基于角速度著色的相應數據集的軌跡。列(b)和(c)分別顯示了我們的方法和DRT-t方法基于相應數據集上著色的尺度誤差的軌跡。刻度誤差在0和1之間。顏色越淺,誤差越小。
4. 主要貢獻
為了克服SfM的局限性并提高初始化準確性和魯棒性,我們在考慮概率法正態極線約束(PNEC)的情況下估計陀螺儀偏差。該方法通過考慮特征點的異性和非均勻不確定性來提高陀螺儀偏差估計的準確性。基于旋轉-平移解耦框架,我們首先解決旋轉問題。然后,我們使用線性全局平移約束(LiGT)解決平移問題。最后,我們通過求解最小二乘問題來估計速度、尺度和重力。為了進一步提高尺度和重力的準確性,我們還引入了一個改進的尺度和重力細化模塊。推薦課程:徹底剖析激光-視覺-IMU-GPS融合SLAM算法:理論推導、代碼講解和實戰。
5. 方法
陀螺儀偏差的準確估計在提高VIO系統軌跡準確性方面起著核心作用。偏差會影響旋轉,進而影響平移和速度的積分。在本節中,我們提出了一種能夠準確求解初始化參數的方法,這些參數包括陀螺儀偏差、速度、重力和尺度。初始化過程分為以下四個步驟:(1)陀螺儀偏差估計,(2)旋轉和平移估計,(3)尺度、速度和重力估計,以及(4)尺度和重力細化。
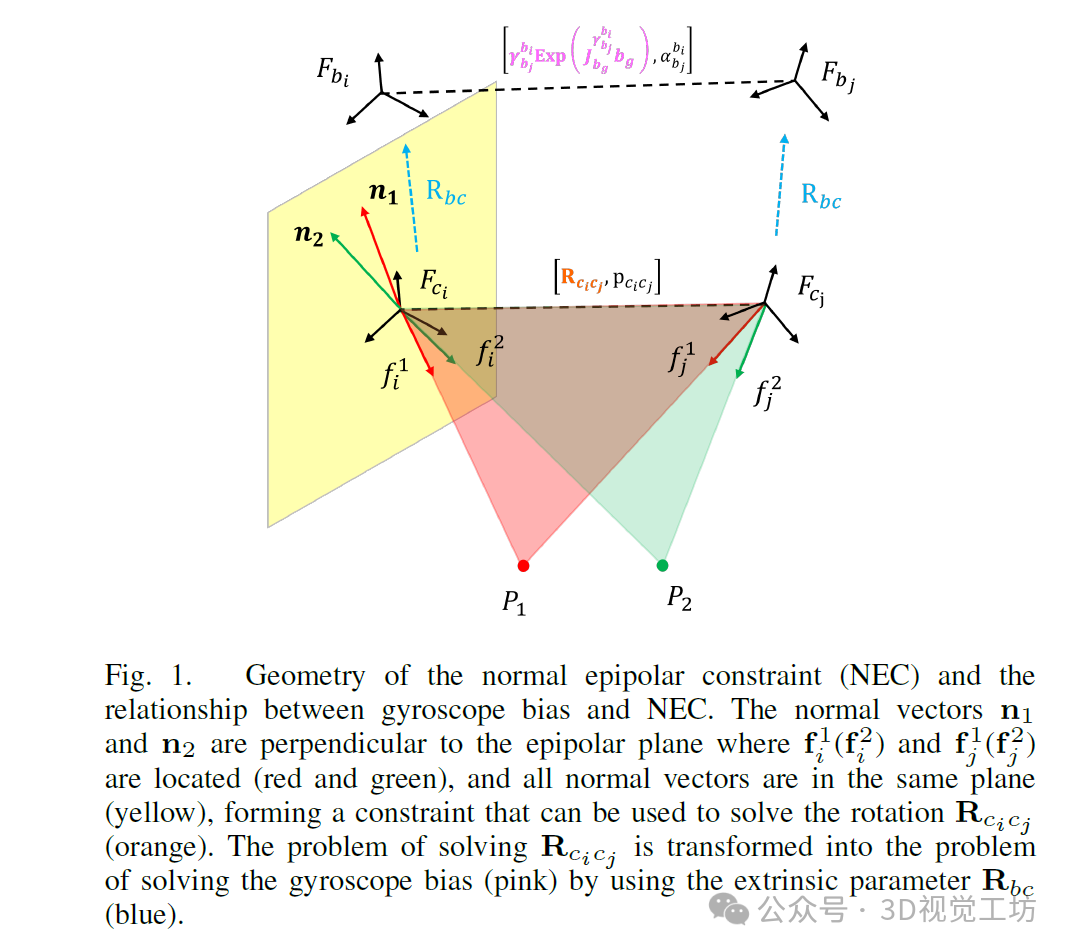
正態極線約束(NEC)的幾何特性以及陀螺儀偏差與NEC之間的關系。法向量n1和n2垂直于包含f1i(f2i)和f1j(f2j)(紅色和綠色)的極平面,且所有法向量位于同一平面(黃色)內,形成一個可用于求解旋轉Rcicj(橙色)的約束。通過將外部參數Rbc(藍色)引入,求解Rcicj的問題轉化為求解陀螺儀偏差(粉色)的問題。
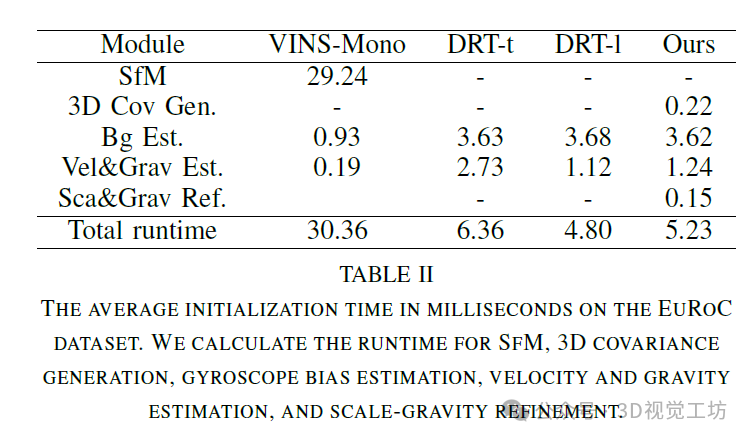
6. 實驗結果
7. 總結 & 未來工作
我們提出了一種基于旋轉-平移解耦框架的魯棒且精確的視覺-慣性初始化方法。
通過建立概率正態極線約束,我們推導出了一個新的陀螺儀偏置估計公式,該公式直接利用視覺觀測結果并計算特征點位置的不確定性。然后,基于慣性測量單元(IMU)和視覺測量值建立最小二乘問題,以估計速度、尺度和重力。最后,我們引入了一個改進的尺度-重力優化模塊。
大量的初始化實驗表明,我們的方法在保持高計算效率的同時,提高了準確性和魯棒性。該方法的一個局限性在于沒有考慮加速度計偏置對速度和尺度的影響。未來,我們將研究一個涵蓋加速度計偏置的尺度-重力優化模塊。
-
陀螺儀
+關注
關注
44文章
783瀏覽量
98665 -
IMU
+關注
關注
6文章
306瀏覽量
45726 -
慣性測量單元
+關注
關注
2文章
44瀏覽量
10439
原文標題:誤差降低29%!超越VINS!魯棒高效的視覺慣性初始化!解鎖VIO新模式!
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
手機模塊初始化向導
基于SQL的數據庫初始化通用方法
LCD1602初始化流程圖及程序的兩種方法

objc源碼中NSObject如何進行初始化
基于WRED協議的TCP連接初始化的優化方法

8259a初始化的步驟及代碼介紹
8253初始化程序分享_8253應用案例
在51平臺下初始化文件的引入導致全局變量無法初始化的問題如何解決





 工商網監
工商網監
評論