


這個(gè)項(xiàng)目是B站上很多人做過的項(xiàng)目
源項(xiàng)目是https://github.com/FASTSHIFT/X-TRACK
首先我們要先了解專案構(gòu)成架構(gòu)發(fā)展,相關(guān)代碼在
路徑Software/X-Track
要經(jīng)過一番學(xué)習(xí)個(gè)人覺得最需要注意下面兩個(gè)路徑
Software/X-Track/Simulator/LVGL.Simulator/HAL
Software/X-Track/USER
Simulator/LVGL.Simulator/HAL
本來是給PC 模擬用的 HAL 基于HMI-Board目前只有LCD,并且使用RT-Thread 基本上能直接對(duì)接
USER
可以看出是基于 Arduino 開發(fā)的程序,對(duì)我們來說現(xiàn)在有了RTduino支持也可能快速的接入了
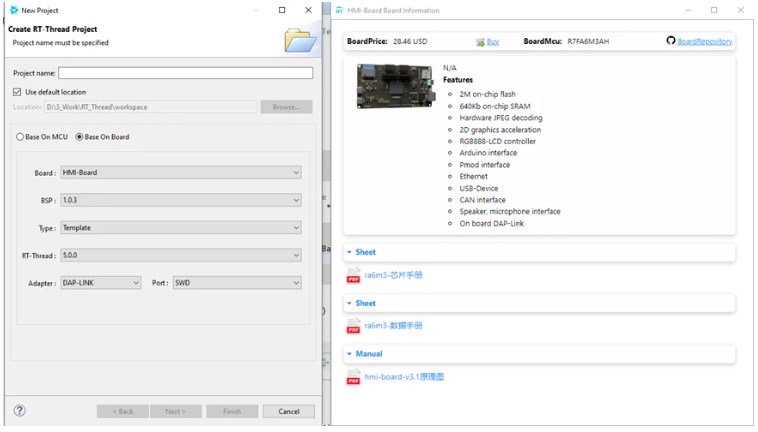
我的復(fù)刻https://github.com/KunYi/duino-hmi-boardbranch: X-Track
只驗(yàn)證 env/scons 編譯,用ubuntu 22.04 系統(tǒng)安裝的arm-none-eabi toolchain
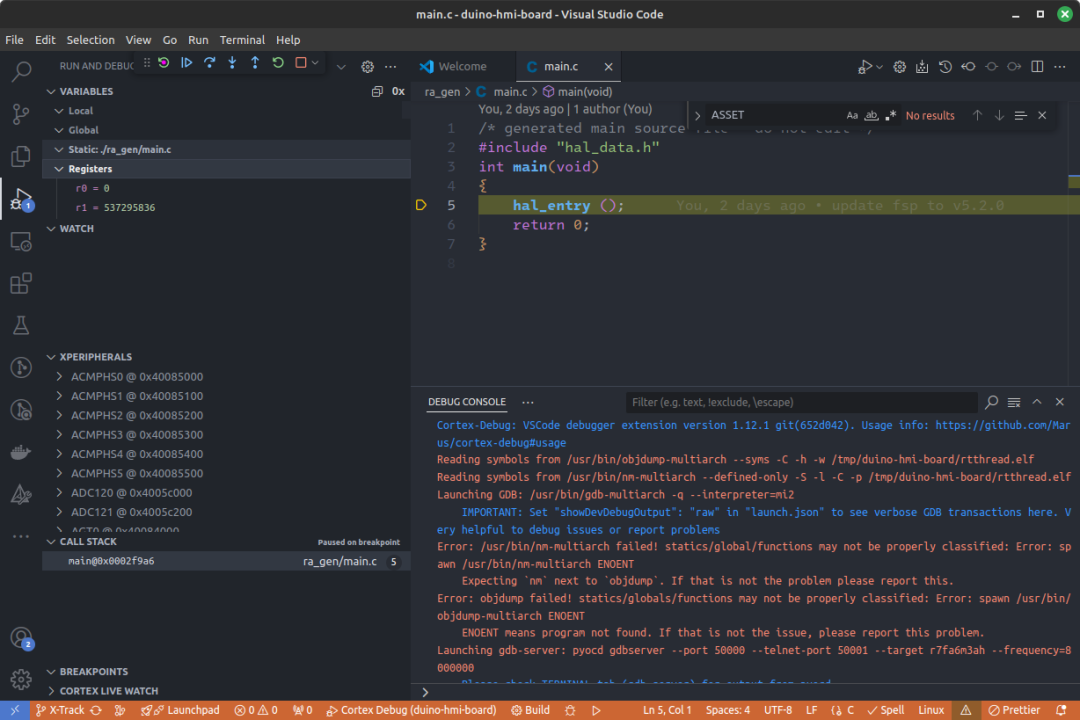
支持VSCode with Cortex-Debug/PyOCD 除錯(cuò)
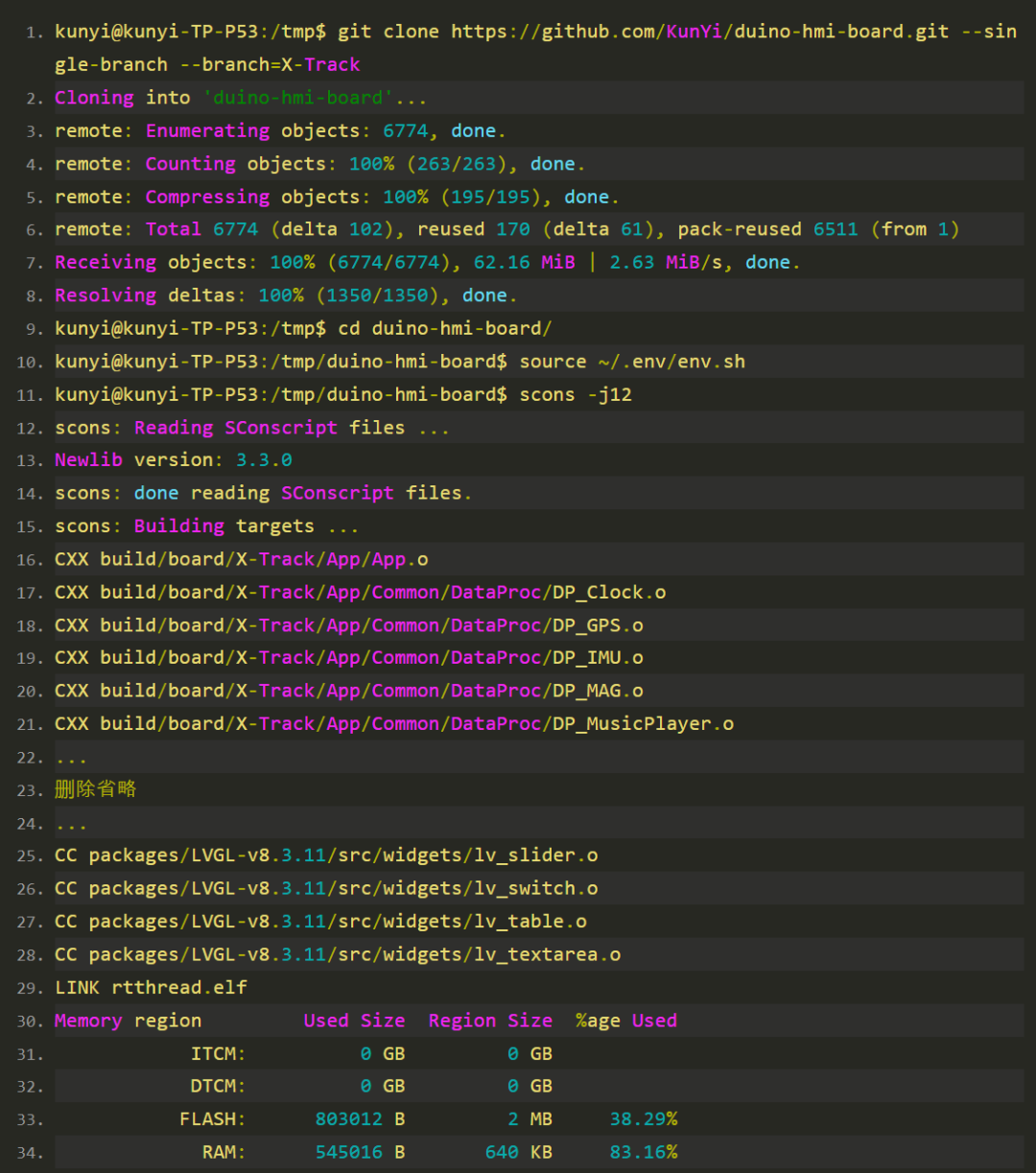
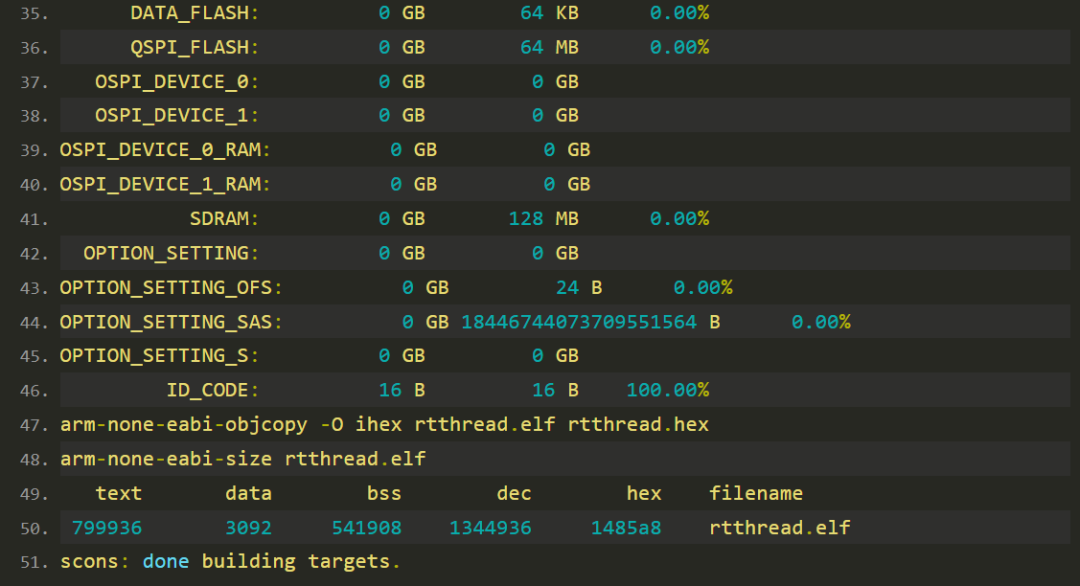
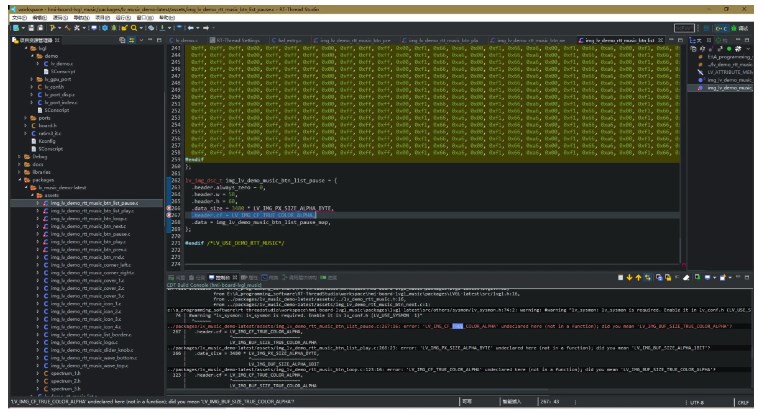
編譯步驟
按照下面步驟拉取git repos與進(jìn)行編譯方式
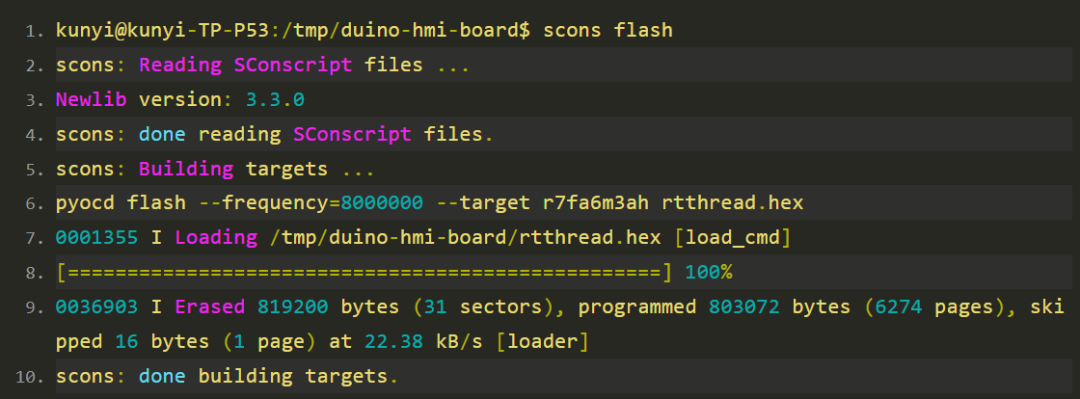
刷新firmware
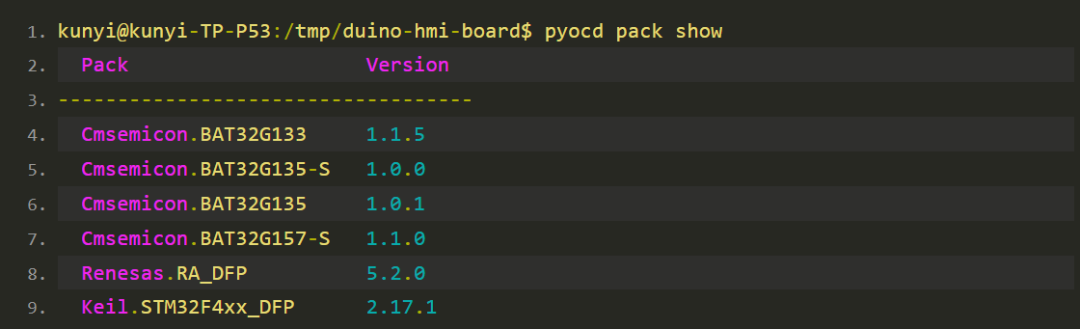
pyocd 需要有安裝好 Renesas RA_DFP
可以用 pyocd pack install 安裝,或是用 pyocd pack show 檢查安裝
如下安裝了 STM32F4xx & Renesas.RA_DFP
這樣我修改了 SConstruct 加進(jìn)了 flash 命令支持
也使用VSode Cortex-Debug 配置pyocd 用來偵錯(cuò)
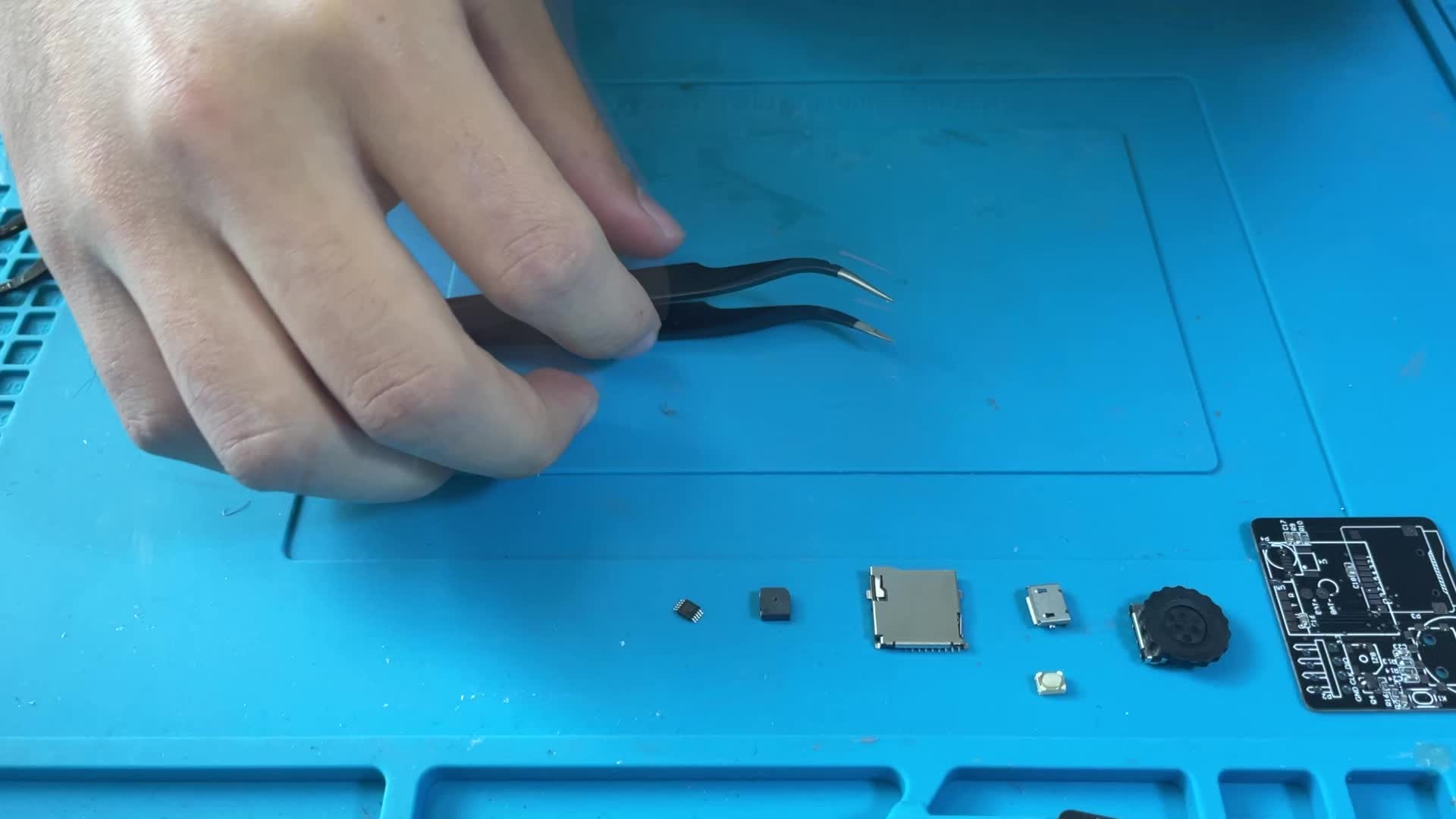
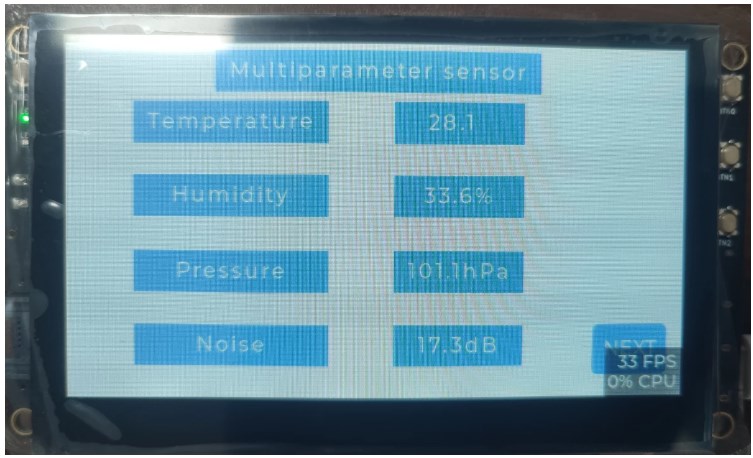
展示

用模擬的版本視頻
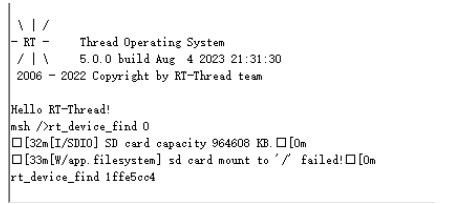
目前已知問題
使用OnChip RTC 系統(tǒng)出現(xiàn)異常,反應(yīng)過慢,目前使用Software RTC
調(diào)整LVGL Thread Stack 從原來4096到8192可以修復(fù)
提示
需要修改 board/X-Track/App/Config/Config.h 內(nèi)部
修改預(yù)設(shè)GPS起始,當(dāng)沒有GPS信號(hào),有一個(gè)設(shè)置的起始地點(diǎn)
CONFIG_GPS_LONGITUDE_DEFAULT
CONFIG_GPS_LATITUDE_DEFAULT
修改為false 切換為 GCJ-02 座標(biāo)系
CONFIG_MAP_USE_WGS84_DEFAULT
切換起始地圖放大級(jí)
CONFIG_LIVE_MAP_LEVEL_DEFAULT
地圖載入路徑, 目前是 /MAP
CONFIG_MAP_DIR_PATH_DEFAULT
-
board
+關(guān)注
關(guān)注
0文章
38瀏覽量
20043 -
HMI系列
+關(guān)注
關(guān)注
0文章
6瀏覽量
5626 -
Arduino
+關(guān)注
關(guān)注
189文章
6497瀏覽量
191931
發(fā)布評(píng)論請(qǐng)先 登錄
基于HMI-Board的智能宿舍空調(diào)管理系統(tǒng)設(shè)計(jì)案例

HMI-Board開發(fā)板工程在添加新組件時(shí)LVGL組件會(huì)報(bào)錯(cuò)的解決辦法
Renesas HMI Board挑戰(zhàn)賽—FSP工具使用
使用DAPLink在對(duì)HMI-Board進(jìn)行固件燒錄,棧溢出如何解決?
【開源自行車碼表】X-TRACK——這可能是你見過最強(qiáng)的DIY自行車碼表
限量預(yù)售|2D加速、JPEG硬解、超高性價(jià)比M4芯片,您的圖形評(píng)估利器——HMI-Board來啦!

聯(lián)合發(fā)布 | 2D加速、JPEG硬解、超高性價(jià)比M4芯片,您的圖形評(píng)估利器——HMI-Board來啦!

怎么解決HMI-Board在調(diào)試4bitSDHI掛載文件系統(tǒng)失敗的問題呢?
瑞薩RA6M3 HMI-Board Video Demo 上手指南
基于HMI-Board開發(fā)板的多參傳感器串口屏設(shè)計(jì)
【直播預(yù)告】HMI-Board Windows32

【直播預(yù)告】基于RT-Thread & LVGL RA6M3 HMI-Board兒童益智學(xué)習(xí)機(jī)

RA6M3 RT-Thread* LVGL HMI Board開發(fā)實(shí)踐指南-GPIO實(shí)踐
HMI-Board OTA升級(jí)快速上手指南






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論