") 激光雷達(dá)的工作原理和分類
激光雷達(dá)的工作原理和分類
1、激光雷達(dá)的工作原理是什么?
激光雷達(dá)是一種以發(fā)射激光束來探測目標(biāo)位置、速度等特征量的雷達(dá)系統(tǒng)。這個(gè)系統(tǒng)也可以通過掃描發(fā)射和接收裝置來獲取目標(biāo)物體的三維形狀,在不同角度發(fā)射和接收激光脈沖,可以構(gòu)建出物體的完整三維輪廓。
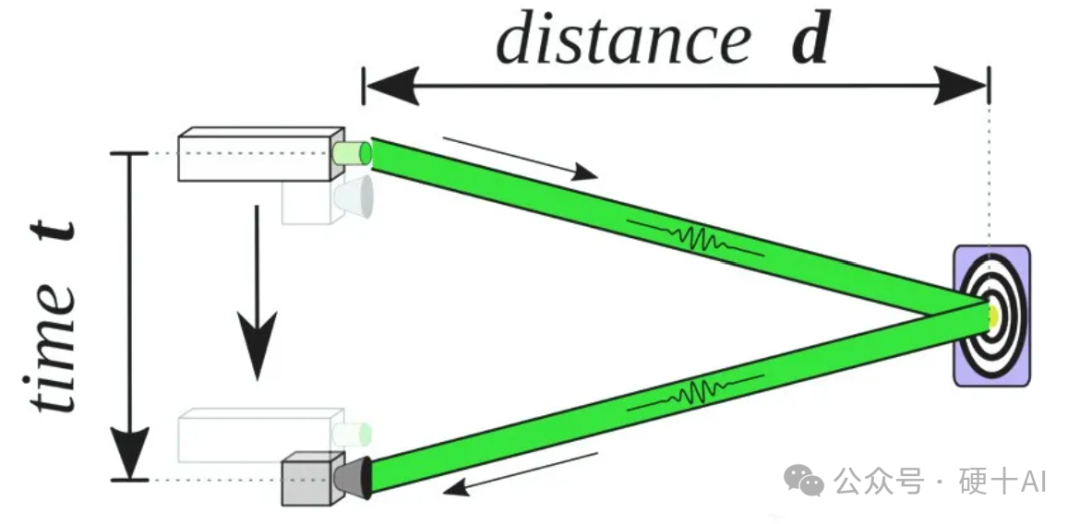
激光雷達(dá)的工作原理基于光的發(fā)射、傳播和接收,最終通過測量光脈沖從發(fā)射到接收的時(shí)間來確定距離,下圖是激光雷達(dá)測量距離的基本步驟。
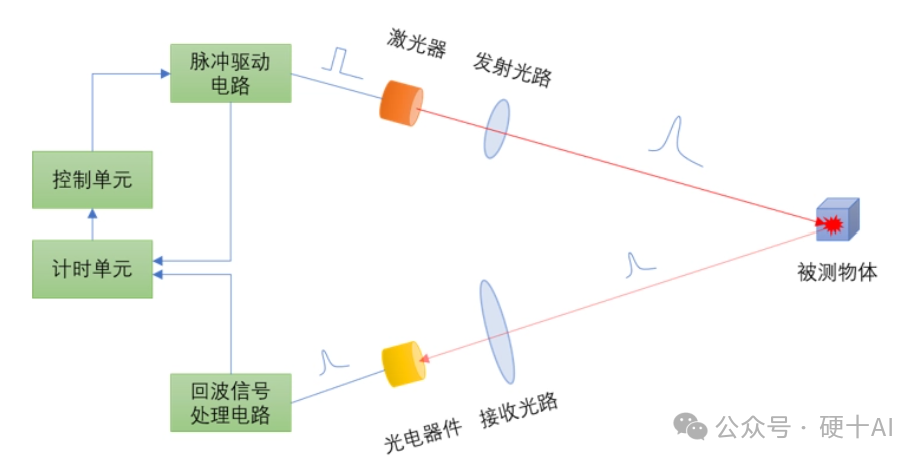
發(fā)射激光脈沖:激光雷達(dá)設(shè)備發(fā)射一束激光脈沖,這些脈沖通常是紅外或近紅外光。
光的傳播:激光脈沖以光速傳播,向目標(biāo)物體移動。
光的反射:當(dāng)激光脈沖遇到目標(biāo)物體時(shí),部分光會被反射回來。
接收反射光:激光雷達(dá)設(shè)備中的接收器捕捉反射回來的激光。接收器通常與發(fā)射器緊密對齊,以確保接收到的光是直接從目標(biāo)物體反射回來的。
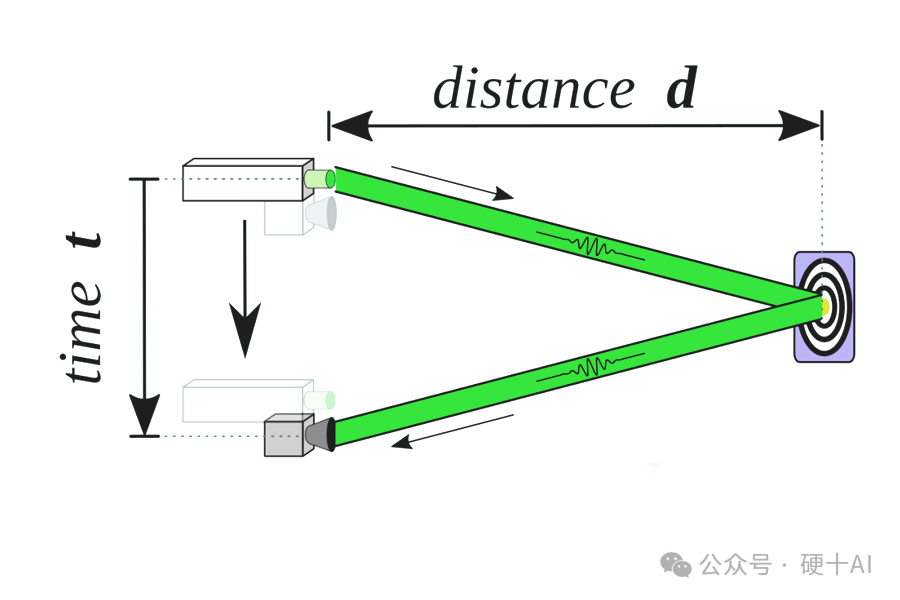
時(shí)間測量:設(shè)備內(nèi)部的計(jì)時(shí)器記錄激光脈沖發(fā)射和接收的時(shí)間間隔。由于光速是已知的,這個(gè)時(shí)間間隔可以用來計(jì)算光脈沖往返目標(biāo)物體的距離。
計(jì)算距離:距離的計(jì)算公式是,距離=光速×?xí)r間/2,其中時(shí)間是光脈沖往返的時(shí)間。
數(shù)據(jù)處理:測量到的距離數(shù)據(jù)可以用于生成點(diǎn)云,這激光雷達(dá)在短時(shí)間內(nèi)可以獲取大量的位置點(diǎn)信息(或者稱為激光點(diǎn)云),這些點(diǎn)云可以進(jìn)一步處理,生成三維模型或地形圖。
2、激光雷達(dá)如何分類?
激光雷達(dá)有很多種不同的分類方法:
(1)按照波長分類,可分為905nm、1550nm、940nm等,目前主流的激光雷達(dá)主要有905nm和1550nm兩種波長。
905nm:激光雷達(dá)接收器可以直接選用價(jià)格較低的硅材質(zhì),905nm激光雷達(dá)成為了當(dāng)下最主流的激光雷達(dá)所選用的波長。不過人眼可識別的可見光波長處在390780nm,而4001400nm波段內(nèi)激光都可以穿過玻璃體,聚焦在視網(wǎng)膜上,而不會被晶狀體和角膜吸收,人眼視網(wǎng)膜溫度上升10℃就會造成感光細(xì)胞損傷。因此905nm激光雷達(dá)為了避免對人眼造成傷害,發(fā)射功率需先在在對人無害的范圍內(nèi)。因此,905nm激光的探測距離也會受到限制。
1550nm:相比905nm激光,1550nm激光會被人眼晶狀體和角膜吸收,不會對視網(wǎng)膜產(chǎn)生傷害,因此1550nm激光雷達(dá)可以發(fā)射更大功率,探測距離也可以做到更遠(yuǎn)。但是1550nm激光雷達(dá)無法采用常需要用到更加昂貴的銦鎵砷(InGaAs)材質(zhì),因此在價(jià)格上較905nm激光雷達(dá)會較高。
(2)按照測量方式分類,可以分為ToF激光雷達(dá)和FMCW激光雷達(dá)
ToF(Time of Flight,飛行時(shí)間):ToF激光雷達(dá)通過直接測量發(fā)射激光與回波的信號的時(shí)間差,基于光在空氣中的傳播速度得到目標(biāo)物體的距離信息,具有響應(yīng)速度快,探測精度高的優(yōu)勢。ToF方案技術(shù)成熟度高,成本相對低,為目前主要激光雷達(dá)使用的方案。
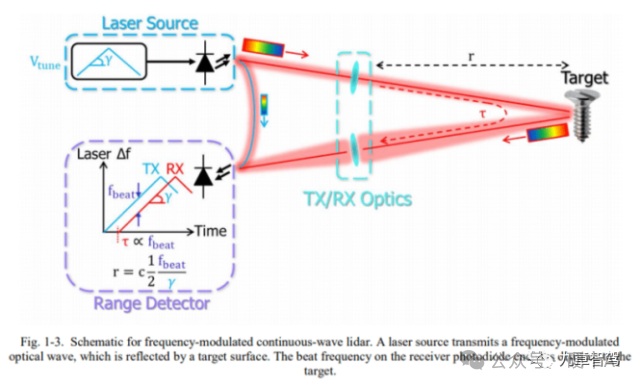
FMCW(Frequency Modulated Continuous Wave,調(diào)頻連續(xù)波):FMCW激光雷達(dá)將發(fā)射激光的光頻進(jìn)行線性調(diào)制,通過回波信號與參考光進(jìn)行相干拍頻得到頻率差,從而間接獲得飛行時(shí)間推出目標(biāo)距離。FMCW具有可直接測量速度信息和抗干擾強(qiáng)的優(yōu)勢。
(3*按照掃描方式分類,可以分為機(jī)械式、半固態(tài)和全固態(tài)雷達(dá),雷達(dá)正在經(jīng)歷機(jī)械式到半固態(tài),再由半固態(tài)到全固態(tài)的發(fā)展過程。
機(jī)械式激光雷達(dá):以一定的速度旋轉(zhuǎn),在水平方向采用機(jī)械結(jié)構(gòu)進(jìn)行 360°的旋轉(zhuǎn)掃描,在垂直方向采用定向分布式掃描,機(jī)械式激光雷達(dá)的發(fā)射器、接收器都跟隨掃描部件一同旋轉(zhuǎn)。機(jī)械式激光雷達(dá)作為最早裝車的產(chǎn)品,技術(shù)已經(jīng)比較成熟,因?yàn)槠涫怯?a target="_blank">電機(jī)控制旋轉(zhuǎn),所以可以長時(shí)間內(nèi)保持轉(zhuǎn)速穩(wěn)定,每次掃描的速度都是線性的。
半固態(tài)激光雷達(dá):發(fā)射器和接收器固定不動,只通過少量運(yùn)動部件實(shí)現(xiàn)激光束的掃描。半固態(tài)激光雷達(dá)由于既有固定部件又有運(yùn)動部件,因此也被稱為混合固態(tài)激光雷達(dá)。根據(jù)運(yùn)動部件類型不同,半固態(tài)激光雷達(dá)又可以細(xì)分為轉(zhuǎn)鏡類半固態(tài)激光雷達(dá)、MEMS半固態(tài)激光雷達(dá)和棱鏡類半固態(tài)激光雷達(dá)。
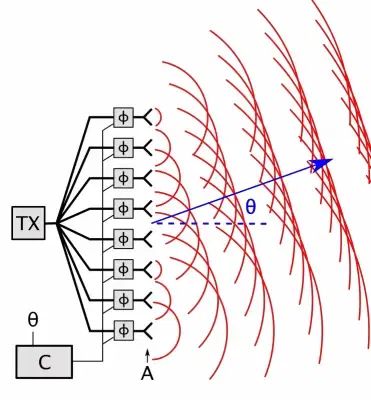
全固態(tài)激光雷達(dá):內(nèi)部完全沒有運(yùn)動部件,使用半導(dǎo)體技術(shù)實(shí)現(xiàn)光束的發(fā)射、掃描和接收。固態(tài)激光雷達(dá)又可分為Flash固態(tài)激光雷達(dá)和OPA固態(tài)激光雷達(dá)。其中OPA(Optical Phase Array的簡稱,即光學(xué)相控陣)固態(tài)雷達(dá)應(yīng)用的是相控陣技術(shù),相控陣?yán)走_(dá)發(fā)射的是電磁波,而OPA激光雷達(dá)發(fā)射的是光,而光和電磁波一樣也表現(xiàn)出波的特性,所以原理上是一樣的。波與波之間會產(chǎn)生干涉現(xiàn)象,通過控制相控陣?yán)走_(dá)平面陣列各個(gè)陣元的電流相位,利用相位差可以讓不同的位置的波源會產(chǎn)生干涉(類似的是兩圈水波相互疊加后,有的方向會相互抵消,有的會相互增強(qiáng)),從而指向特定的方向,往復(fù)控制便得以實(shí)現(xiàn)掃描效果。光和電磁波一樣也表現(xiàn)出波的特性,因此同樣可以利用相位差控制干涉讓激光“轉(zhuǎn)向”特定的角度,往復(fù)控制實(shí)現(xiàn)掃描效果。
3、激光雷達(dá)的應(yīng)用場景有哪些?
激光雷達(dá)在眾多領(lǐng)域都發(fā)揮著重要作用,并且隨著技術(shù)的不斷發(fā)展,其應(yīng)用范圍還在不斷擴(kuò)大。
自動駕駛:在自動駕駛汽車中,激光雷達(dá)能夠精確地感知車輛周圍的環(huán)境,包括車輛、行人、障礙物的位置、速度和形狀等,為車輛的路徑規(guī)劃和決策提供關(guān)鍵信息。
智能交通:用于交通流量監(jiān)測、道路狀況評估和智能交通信號控制。它可以實(shí)時(shí)檢測道路上的車輛數(shù)量、速度和間距,優(yōu)化交通流量。
測繪與地理信息:能夠快速、高精度地獲取地形、地貌和建筑物的三維信息,用于地圖繪制、城市規(guī)劃和土地測量。比如在大規(guī)模的地形測繪項(xiàng)目中,激光雷達(dá)可以生成詳細(xì)的數(shù)字高程模型。
工業(yè)自動化:在工廠自動化中,用于物料搬運(yùn)、機(jī)器人導(dǎo)航和質(zhì)量檢測。例如,在倉儲物流中,激光雷達(dá)可以幫助自動導(dǎo)引車(AGV)準(zhǔn)確地在倉庫中行駛和裝卸貨物。
航空航天:用于飛機(jī)的防撞系統(tǒng)、地形跟隨和地形規(guī)避。同時(shí),在衛(wèi)星遙感中,激光雷達(dá)可以測量大氣參數(shù)和地表特征。
軍事領(lǐng)域:用于目標(biāo)偵察、武器制導(dǎo)和戰(zhàn)場態(tài)勢感知等。例如,在導(dǎo)彈制導(dǎo)系統(tǒng)中,激光雷達(dá)可以提高導(dǎo)彈的命中精度。
4、激光雷達(dá)選型時(shí)有哪些關(guān)鍵參數(shù)?
選擇激光雷達(dá)時(shí)需要注意一些關(guān)鍵規(guī)格參數(shù)
測距精度:表示為距離的誤差
角分辨率:可以探測到最小角度,與激光束發(fā)射和接收統(tǒng)計(jì)相關(guān)。
掃描頻率:每秒掃描次數(shù),也稱幀率,影響激光雷達(dá)的實(shí)時(shí)性能。
視場角:雷達(dá)可以覆蓋的水平和垂直角度范圍,決定了激光雷達(dá)可以檢測到多少個(gè)目標(biāo)。
工作距離:可以探測到的最遠(yuǎn)距離,實(shí)際應(yīng)用和激光功率、接收機(jī)靈敏度等相關(guān)。
數(shù)據(jù)輸出方式:輸出數(shù)據(jù)的格式和接口類型
掃地機(jī)器人是應(yīng)用非常廣泛的機(jī)器人形態(tài),掃地機(jī)器人的的關(guān)鍵指標(biāo)主要包括,清潔能力指標(biāo),含清潔吸力、清掃部件設(shè)計(jì)、續(xù)航時(shí)間和清掃面積指標(biāo)、塵盒容量、噪音指標(biāo)等;智能化指標(biāo),含建圖能力、導(dǎo)航能力、傳感器配置、避障能力、自動回充能力等;控制APP易用性指標(biāo),含清掃模式設(shè)定、定時(shí)清掃設(shè)定、虛擬墻設(shè)置、地圖存儲等。
1、掃地機(jī)器人關(guān)鍵的技術(shù)指標(biāo)有哪些?
(1)清潔能力
吸力指標(biāo):吸力的強(qiáng)弱直接影響清掃效果,是衡量掃地機(jī)器人清潔能力的重要指標(biāo),單位為帕斯卡(Pa)。日常家用清潔1500~2500Pa的吸力可以應(yīng)對灰塵、毛發(fā)等常見垃圾;如果需要清理較大顆粒雜物或較頑固的污漬,則需要更高的吸力。當(dāng)然,吸力越大通常意味著噪音和能耗也會相應(yīng)增加。
清掃部件設(shè)計(jì):包含滾刷、邊刷等清潔部件的設(shè)計(jì)。滾刷位于掃地機(jī)器人底部吸塵口前方,主要作用是將底部灰塵掃起。滾刷材質(zhì)有膠條滾刷和刷毛滾刷,膠條滾刷能刮掉地面頑固顆粒,刷毛滾刷可拔出地磚和地板縫隙的灰塵,一些產(chǎn)品采用兩者結(jié)合的方式,滾刷的形狀、長度、轉(zhuǎn)速等設(shè)計(jì)也會影響清掃效果。邊刷位于掃地機(jī)器人的邊緣,可將墻邊和角落的灰塵清掃出來,邊刷的長度、材質(zhì)以及轉(zhuǎn)動靈活度等也會影響其清掃性能。對于掃拖一體的掃地機(jī)器人還需要考慮拖布的設(shè)計(jì),拖布的材質(zhì)、形狀、濕潤度控制等都很關(guān)鍵。
清掃面積和續(xù)航時(shí)間指標(biāo):續(xù)航時(shí)間決定了機(jī)器人在一次充電后能清掃的面積,單位為分鐘;清掃面積以平方米(m2)計(jì)算。電池容量在3000mAh的家用掃地機(jī)器人可滿足大多數(shù)日常清潔需求。
塵盒容量設(shè)計(jì):塵盒用于收集垃圾,塵盒容量越大,可容納的垃圾就越多,減少清理塵盒的頻率。
噪音指標(biāo):清掃工作時(shí)產(chǎn)生的噪音,通常以分貝(dB)為單位,影響用戶體驗(yàn)。噪音在60分貝以下的掃地機(jī)器人較為適合家用場景使用,一些掃地機(jī)器人會采用渦流降噪技術(shù)等方式來降低噪音。
(2)智能化程度
建圖能力:通過機(jī)器人的激光傳感器掃描周圍環(huán)境,構(gòu)建地圖,定位精度高、建圖速度快。
定位和導(dǎo)航:可通過激光雷達(dá)傳感器、慣性傳感器、視覺傳感器等協(xié)同導(dǎo)航。定位和導(dǎo)航中應(yīng)用的不同傳感器都會遇到一些限制,如應(yīng)用視覺導(dǎo)航對光線條件有要求,光線較暗影響導(dǎo)航精度;應(yīng)用陀螺儀和加速度計(jì)等慣性傳感器獲取機(jī)器人的運(yùn)動信息,容易產(chǎn)生累積誤差。
路徑規(guī)劃:合理的路徑規(guī)劃可提高掃地機(jī)器人的清潔效率和覆蓋率,避免漏掃和重復(fù)清掃。比如根據(jù)房間的布局和障礙物分布,自動規(guī)劃高效的清掃路線,先沿邊清掃、再分區(qū)清掃等。
避障能力:掃地機(jī)器人在清掃過程中避免碰撞家具、墻壁等障礙物,減少機(jī)身磨損和損壞。通過紅外避障、超聲波避障、激光避障、視覺避障、碰撞傳感器等協(xié)同實(shí)現(xiàn)避障。不同成本的掃地機(jī)器人,會配置不同的傳感器組合。
自動充電:自動回充功能可以讓掃地機(jī)器人在電量不足時(shí)自動返回充電座充電,充電完成后繼續(xù)工作,
(3)控制APP易用性指標(biāo)
機(jī)器人需支持手機(jī)等終端的APP控制、并有清潔模式選擇、定時(shí)清掃、虛擬墻設(shè)置、地圖存儲等功能。
2、"聰明"和"不聰明"的掃地機(jī)器人的區(qū)別是什么?
智能化的掃地機(jī)器人需要具備自主導(dǎo)航、路徑優(yōu)化、動態(tài)避障、自動充電等能力。掃地機(jī)器人的智能化差別主要體現(xiàn)在以下幾個(gè)方面。
(1)掃地機(jī)器人導(dǎo)航能力差別
不聰明的:通常采用隨機(jī)導(dǎo)航,僅僅依靠超聲波探測實(shí)現(xiàn)基礎(chǔ)避障;容易重復(fù)清掃或遺漏區(qū)域。
聰明的:使用激光雷達(dá)、攝像頭等進(jìn)行地圖構(gòu)建和路徑規(guī)劃,能夠高效避障。
(2)掃地機(jī)器人環(huán)境感知能力差別
不聰明的:傳感器較少,缺乏學(xué)習(xí)能力,僅能進(jìn)行基本的碰撞檢測。
聰明的:配備多種傳感器,通過不同的傳感器協(xié)同能識別不同地面類型、障礙物和污垢區(qū)域。
(3)掃地機(jī)器人清掃模式能力差別
不聰明的:功能簡單,可能有一種或幾種基本清掃模式。
聰明的:支持多種清掃模式,如自動清掃,局部清掃,邊緣清掃,定點(diǎn)清掃,區(qū)域清掃,深度清掃,靜音清掃等。聰明的掃地機(jī)器人會跟人一樣,區(qū)分清楚哪些是干凈的地方哪些是比較臟的地方,通過先沿邊清掃、再分區(qū)清掃、最后定點(diǎn)深度清掃等組合操作實(shí)現(xiàn)智能清掃。
早期的掃地機(jī)器人就屬于“不聰明”的模式,模式是“隨機(jī)”清掃,沒有規(guī)劃能力,走到哪里掃到哪里,碰到哪里就改變路線。現(xiàn)在智能化的掃地機(jī)器人是“聰明”的模式,清掃告別了“橫沖直撞”的隨機(jī)式,利用定位導(dǎo)航技術(shù)讓清掃變得有規(guī)劃,提高清掃效率,降低機(jī)器損耗。
1、機(jī)器人進(jìn)入了未知的環(huán)境會怎樣?
當(dāng)我們?nèi)チ艘粋€(gè)陌生的環(huán)境,為了迅速熟悉環(huán)境并到達(dá)自己想去的地方,如圖書館、旅店、咖啡廳等,我們會做下面這些事情。
眼睛觀察周圍地標(biāo),如建筑、大樹、花壇等,并記住他們的特征。
根據(jù)雙眼獲得的信息,在自己的腦海中把特征地標(biāo)在三維地圖中重建出來,形成完整的對環(huán)境認(rèn)知的三維信息。
在行走時(shí)不斷獲取新的特征地標(biāo),并且校正自己頭腦中的地圖模型。
根據(jù)自己前一段時(shí)間行走獲得的特征地標(biāo),確定自己的位置。
走了很長一段路的時(shí)候,我們可能會回頭看看,和腦海中之前的地標(biāo)進(jìn)行匹配。
如以上五步在整個(gè)行進(jìn)的過程中,我們同時(shí)進(jìn)行定位和建圖。
如果將一個(gè)機(jī)器人放入未知的環(huán)境中的未知位置,是否有辦法讓機(jī)器人一邊逐步描繪出此環(huán)境完全的地圖,一邊決定應(yīng)該往哪個(gè)方向行進(jìn)?例如掃地機(jī)器人,如何能不受障礙物影響行進(jìn)到房間,并進(jìn)入每個(gè)角落完成清掃工作。這就涉及到兩個(gè)主要的任務(wù),建圖任務(wù)與定位任務(wù),并且這兩個(gè)任務(wù)是并發(fā)的。
2、SLAM是什么?
SLAM(Simultaneous Localization and Mapping,即同步定位與地圖構(gòu)建),是一種在機(jī)器人學(xué)、自動駕駛和移動機(jī)器人和增強(qiáng)現(xiàn)實(shí)等領(lǐng)域中非常重要的技術(shù)。SLAM最早由Smith、Self和Cheeseman于1988年提出,是實(shí)現(xiàn)真正全自主移動機(jī)器人的關(guān)鍵。
SLAM技術(shù)解決的問題是,機(jī)器人被放置在一個(gè)它從未見過的環(huán)境中,SLAM技術(shù)讓機(jī)器人在沒有任何先驗(yàn)地圖信息的情況下,通過自身的傳感器來探索環(huán)境,同時(shí)構(gòu)建出環(huán)境的地圖,并在這個(gè)過程中確定自己在地圖中的位置。定位(Localization)任務(wù)和地圖構(gòu)建任務(wù)(Mapping)是同時(shí)進(jìn)行的。
SLAM可以分為激光SLAM和視覺SLAM,激光SLAM可以分為2D SLAM和3D SLAM,視覺SLAM可以分為Sparse SLAM和Dense SLAM
SLAM技術(shù)的發(fā)展涉及到多個(gè)學(xué)科,包括計(jì)算機(jī)視覺、機(jī)器人學(xué)、人工智能和控制理論等。隨著技術(shù)的進(jìn)步,SLAM在精度、效率和應(yīng)用范圍上都有了顯著的提升。
3、SLAM中有哪些關(guān)鍵技術(shù)點(diǎn)?
(1)傳感器技術(shù):外部信息的采集依賴慣性測量單元(IMU)、霍爾編碼器(Encoder)、激光雷達(dá)(Lidar)、深度攝像機(jī)等。
慣性測量單元:IMU提供姿態(tài)和位置信息。
霍爾編碼器:通過編碼器獲取車輪的運(yùn)動數(shù)據(jù),原理參考霍爾傳感器 。
激光雷達(dá):Lidar通過發(fā)射激光束來探測目標(biāo)位置、速度等特征量,感知外部信息。
攝像機(jī):包括單目攝像頭、雙目攝像頭、深度攝像機(jī),核心都是獲取RGB和depth map(深度信息)。
(2)算法技術(shù)
應(yīng)用SLAM算法的時(shí)候主要考慮下面幾個(gè)方面
如何表示地圖?比如根據(jù)實(shí)際場景需求去選擇dense或sparse算法。
如何感知信息?比如選擇激光雷達(dá)或者深度攝像機(jī)去感知外部環(huán)境。
如何關(guān)聯(lián)傳感器數(shù)據(jù)?對于不同sensor的數(shù)據(jù)類型、時(shí)間戳、坐標(biāo)系表達(dá)方式各有不同,需要統(tǒng)一處理。
如何進(jìn)行定位與構(gòu)圖?這是指實(shí)現(xiàn)位姿估計(jì)和建模,這里面涉及到很多數(shù)學(xué)問題,物理模型建立,狀態(tài)估計(jì)和優(yōu)化。
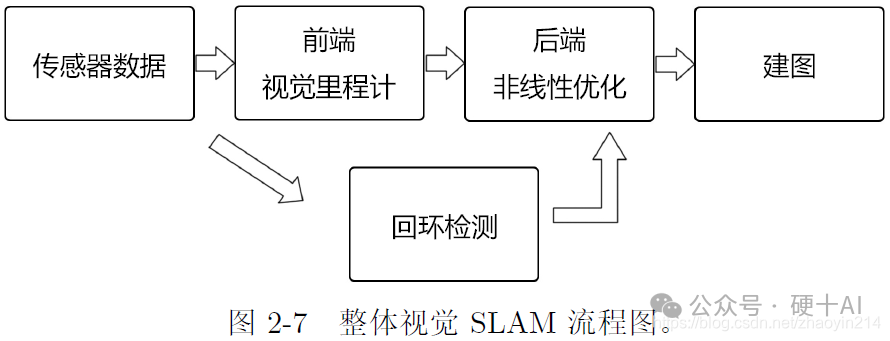
以視覺SLAM(VSLAM)為例,SLAM處理信息處理流程可以歸納為如下流程圖,其中“前端”是視覺里程計(jì),提取每幀圖像特征點(diǎn),利用相鄰幀圖像,進(jìn)行特征點(diǎn)匹配,然后去除大噪聲進(jìn)行匹配,得到一個(gè)位姿信息,同時(shí)利用IMU提供的姿態(tài)信息進(jìn)行濾波融合。“后端”則是通過非線性算法對前端輸出的結(jié)果進(jìn)行優(yōu)化,涉及的數(shù)學(xué)知識較多,需利用濾波理論(EKF、UKF、PF)、或者優(yōu)化理論等算法進(jìn)行優(yōu)化,最終得到最優(yōu)的位姿估計(jì)。
常見的SLAM算法包括一下算法。PTAM算法,這是早期的視覺 SLAM 算法;Mono-SLAM算法,是單目視覺SLAM算法;ORB-SLAM算法,是基于 ORB 特征的視覺SLAM算法,具有較好的實(shí)時(shí)性和魯棒性;還有RGBD-SLAM算法、LSD-SLAM算法等。實(shí)際應(yīng)用中,SLAM建圖具體實(shí)現(xiàn)方式會因使用的算法、傳感器類型以及應(yīng)用場景的不同而有所差異。
使用ROS實(shí)現(xiàn)機(jī)器人的SLAM是非常方便的,因?yàn)橛休^多現(xiàn)成的功能包可供開發(fā)者使用,如gmapping、hector_slam、cartographer、rgbdslam、ORB_SLAM、move_base、amcl等,并且開發(fā)者還能應(yīng)用仿真環(huán)境進(jìn)行驗(yàn)證。
4、SLAM技術(shù)在自動駕駛中的應(yīng)用
(1)SLAM技術(shù)在自動駕駛中的應(yīng)用體現(xiàn)在以下幾個(gè)方面
環(huán)境感知:自動駕駛汽車通過搭載的傳感器(如激光雷達(dá)、相機(jī)、雷達(dá)等)實(shí)時(shí)獲取周圍環(huán)境的信息。利用SLAM技術(shù),車輛能夠從這些傳感器數(shù)據(jù)中提取特征,構(gòu)建出周圍環(huán)境的地圖。
實(shí)時(shí)定位:在行駛過程中,車輛需要實(shí)時(shí)確定自身在地圖中的位置。SLAM技術(shù)通過傳感器數(shù)據(jù)和地圖信息,計(jì)算出車輛的精確位置和姿態(tài)。這種定位不僅依賴于GPS,還依賴于車輛自身的傳感器,確保在GPS信號弱或無信號的環(huán)境中也能準(zhǔn)確定位。
路徑規(guī)劃:有了環(huán)境地圖和自身定位信息,自動駕駛汽車可以進(jìn)行路徑規(guī)劃。SLAM技術(shù)幫助車輛識別可行路徑,避開障礙物,規(guī)劃出最優(yōu)行駛路線。
自動避障:在行駛過程中,車輛需要實(shí)時(shí)檢測和避開障礙物。SLAM技術(shù)通過傳感器數(shù)據(jù),識別出前方的障礙物,并計(jì)算出避障路徑。
回環(huán)檢測:回環(huán)檢測是SLAM中的一個(gè)重要環(huán)節(jié),指的是車輛在行駛過程中識別出曾經(jīng)經(jīng)過的地點(diǎn)。這有助于校正地圖和定位信息,避免重復(fù)探索和定位誤差。
動態(tài)地圖更新:環(huán)境是動態(tài)變化的,自動駕駛汽車需要不斷更新其地圖信息。SLAM技術(shù)能夠?qū)崟r(shí)處理新的傳感器數(shù)據(jù),更新地圖,確保地圖的準(zhǔn)確性和時(shí)效性。
傳感器融合:自動駕駛汽車通常搭載多種傳感器,每種傳感器都有其優(yōu)缺點(diǎn)。SLAM技術(shù)通過融合不同傳感器的數(shù)據(jù),提高整體的感知能力和魯棒性。
數(shù)據(jù)關(guān)聯(lián):不同傳感器的數(shù)據(jù)類型和時(shí)間戳可能不同,SLAM技術(shù)需要將這些數(shù)據(jù)關(guān)聯(lián)起來,確保數(shù)據(jù)的一致性和準(zhǔn)確性。
(2)SLAM技術(shù)具體實(shí)現(xiàn)步驟
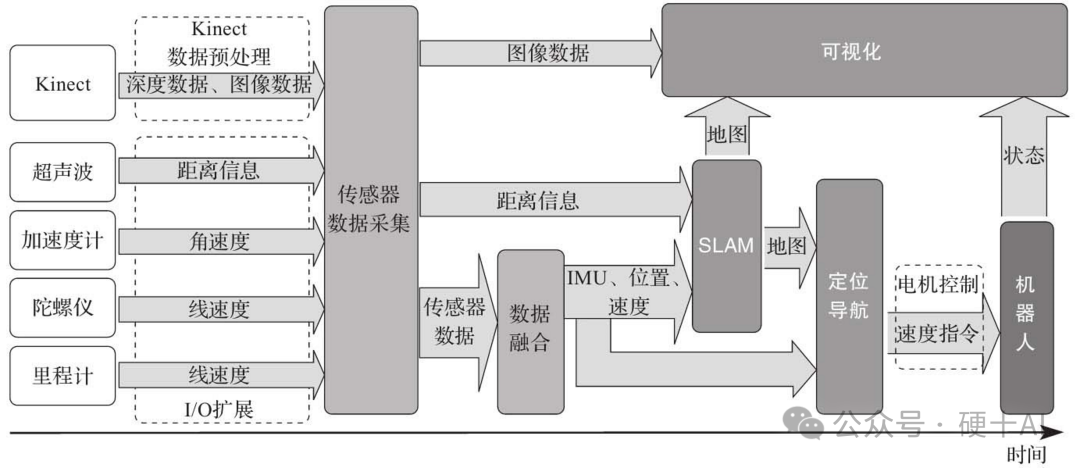
傳感器數(shù)據(jù)采集:車輛通過激光雷達(dá)、相機(jī)、IMU、超聲波等傳感器獲取周圍環(huán)境的圖像和距離信息。
特征提取與匹配:從傳感器數(shù)據(jù)中提取特征點(diǎn),并在不同時(shí)間點(diǎn)的圖像中進(jìn)行匹配。
位姿估計(jì):利用特征點(diǎn)匹配結(jié)果,計(jì)算車輛在地圖中的位置和姿態(tài)。
地圖構(gòu)建:將車輛的移動軌跡和環(huán)境特征結(jié)合起來,逐步構(gòu)建出環(huán)境地圖。
路徑規(guī)劃與優(yōu)化:根據(jù)地圖和車輛定位信息,規(guī)劃出最優(yōu)行駛路徑,并在行駛過程中不斷優(yōu)化。
動態(tài)更新:實(shí)時(shí)處理新的傳感器數(shù)據(jù),更新地圖和定位信息,應(yīng)對環(huán)境變化。
通過這些步驟,SLAM技術(shù)為自動駕駛汽車提供了強(qiáng)大的環(huán)境感知和導(dǎo)航能力,確保其在復(fù)雜環(huán)境中的安全和高效行駛。
內(nèi)容來源:硬十AI
-
接收器
+關(guān)注
關(guān)注
14文章
2468瀏覽量
71871 -
雷達(dá)系統(tǒng)
+關(guān)注
關(guān)注
6文章
245瀏覽量
28670 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3967瀏覽量
189824
原文標(biāo)題:激光雷達(dá)的工作原理
文章出處:【微信號:AMTBBS,微信公眾號:世界先進(jìn)制造技術(shù)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
激光雷達(dá)是自動駕駛不可或缺的傳感器
激光雷達(dá)分類以及應(yīng)用
常見激光雷達(dá)種類
消費(fèi)級激光雷達(dá)的起航
固態(tài)設(shè)計(jì)激光雷達(dá)
TOF激光雷達(dá)
毫米波雷達(dá)VS激光雷達(dá)VS超聲波雷達(dá)
最佳防護(hù)——激光雷達(dá)與安防監(jiān)控解決方案
激光雷達(dá)知多少:從技術(shù)上講講未來前景
激光雷達(dá)傳感技術(shù)的工作原理和特點(diǎn)
激光雷達(dá)工作原理

簡述激光雷達(dá)的結(jié)構(gòu)原理分類及特點(diǎn) TIM320激光雷達(dá)的工作原理
激光雷達(dá)LIDAR基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論