 基于AD598信號處理芯片的LVDT直線位移傳感器研究
基于AD598信號處理芯片的LVDT直線位移傳感器研究
在信息采集系統中,傳感器通常處于系統前端,即檢測和控制系統之首,它提供給系統處理和決策所必需的原始信息,因此,傳感器的精度對整個系統是至關 重要的。在位移、速度及加速度的測量中,經常使用差動變壓器式傳感器,原因是其靈敏度高、線性好且有配套集成電路,但傳統的LVDT傳感器對工作電源的穩 定性和精度要求太高,且電路板大都由分離元件搭接而成,極易產生松脫和受潮變質現象,從而影響傳感器的使用壽命和整體性能。本文介紹一種基于AD598信 號處理芯片的LVDT直線位移傳感器,并通過實例對其誤差和精度進行探討。
1 基本原理
差動變壓器式傳感器是利用線圈的自感或者互感的變化來實現測量的一種裝置,它的核心是可變自感或可變互感。本文采用的變氣隙式差動變壓器式電感傳感器是利用互感的變化來工作的。
1.1 基本結構及工作原理
上下2只鐵芯上均有1個勵磁線圈和1個輸出線圈。上下2個勵磁線圈串聯后接交流勵磁電源電壓Uin,2個輸出線圈則按電勢反向串聯。忽略高階無窮小量,當ωR(ω為交流勵磁電源電壓Uin的頻率,R為勵磁線圈的等效電阻)時,可推導出
式中:Uin為勵磁電源電壓(單位V);Uout為輸出電壓(單位V);N1,N2分別為勵磁線圈和輸出線圈的匝數;△δ為軸偏移平衡位置的距離(單位mm);δ占為軸處于平衡位置時的氣隙大小(單位mm)。
當軸處于中間位置時,δ1=δ2=δ,勵磁線圈中產生交變磁通φ1和φ2,在輸出線圈中便產生交流感應電勢。由于兩邊氣隙相等,磁阻相等,所 以,φ1=φ2,輸出線圈中感應出的電勢E21=E22,由于次級是按電勢反向連接的,輸出電壓Uout=0。當軸偏離中間位置時,兩邊氣隙不等(即 δ1≠δ2),輸出線圈中感應的電勢不再相等(即E21≠E22),便有電壓Uout輸出。Uout的大小及相位取決于軸的位移大小和方向。
1.2 輸出特性方程
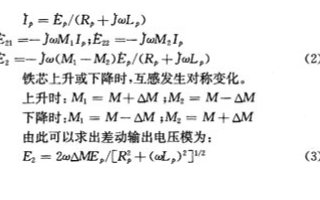
設差動變壓器原邊激勵電壓為Ep、角頻率為ω、電流為Ip、電感為Lp、等效電阻為Rp。副邊電壓分別為E21、E22,互感為M1、M2。若忽略磁滯渦流及耦合電容的影響,可以得出:
2 傳感器測量電路
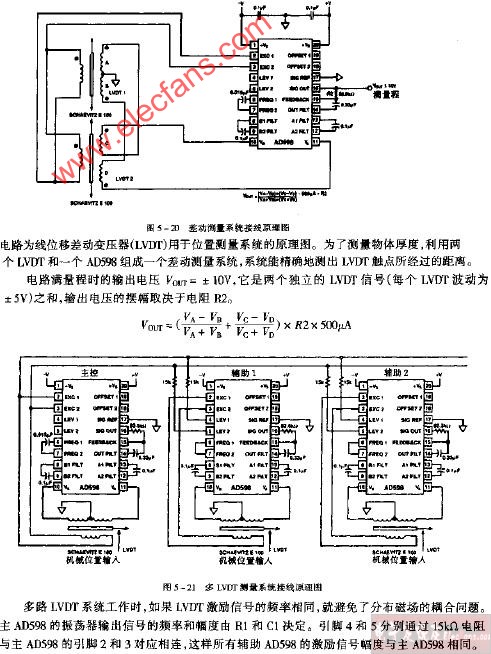
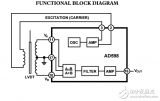
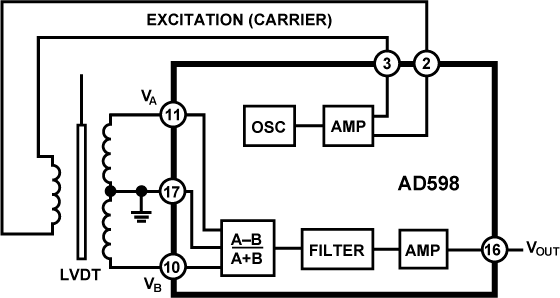
AD598是由Analog Device推出的新型LVDT專用信號處理芯片,原理圖如圖2所示。由圖可知,該芯片主要包含兩部分:一部分為正弦波發生器,它的頻率及幅值均可由少數 外接元件確定;另一部分為LVDT次級的信號處理部分。通過這一部分產生一個與鐵芯位移成正比的直流電壓信號。AD598可驅動高達24 V,頻率范圍為20Hz~20 kHz的LVDT原邊線圈,又可接受最低為100 mV的次級輸入,所以適用于許多不同類型的LVDT。
3 測量系統誤差分析
測量系統的誤差按來源也可分為固定誤差和隨機誤差兩大類。
3.1 固定誤差
固定誤差指差動變壓器結構(加工精度)和材料(磁滯渦流)所造成的誤差。這是系統論證時要結合測量的精度要求及經濟指標綜合考慮的。系統一旦確定下來這些因素一般是不能改變的。
3.2 隨機誤差
隨機誤差按誤差來源可以分為由激勵源的波動引起的誤差和由相敏檢波引起的誤差。由于AD598把振蕩器,LVDT和相敏解調器封裝在一起,不但提高 了產品的集成度,而且大大減少了外圍元件的個數,使傳感器的性能得到大幅提高,因此,在本文中就不對相敏檢波引起的誤差進行推導了。
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753083
發布評論請先 登錄
相關推薦
基于AD598信號處理芯片的傳感器測量系統誤差的研究
請問AD598/AD698 LVDT調理器是否都需要添加獨立的相位檢測網絡?
LVDT線性位移傳感器不同結構的工作原理含義
ad598接入傳感器后發熱怎么解決?
請問AD598/AD698 LVDT調理器是否都需要添加獨立的相位檢測網絡?
AD598,pdf datasheet (LVDT Sign
LVDT信號調理器AD598
AD598 LVDT信號調理器






 工商網監
工商網監
評論