 為何無人機領域廣泛采用PX4作為核心控制平臺
為何無人機領域廣泛采用PX4作為核心控制平臺
在眾多無人機類型中,四旋翼因其具備垂直起降、穩定性強、結構相對簡單等特點而得到廣泛應用。目前,無論是學術界還是工業界,關于四旋翼的研究都在不斷深入,關于四旋翼的拓展運用不斷增加。因此,學習與研究四旋翼相關的技術有著良好的實用價值。

3D視覺工坊御風250整機實物圖
學習四旋翼,首先必須具備一個良好的實驗平臺
對于初學者,由于缺乏經驗,往往難以合理地選擇與搭配各個模塊,容易忽略主次。例如,對于機架,首先要考慮的就是強度,因為這直接關乎無人機的振動,而振動影響傳感器數據質量,數據質量影響最終的控制效果;其次要考慮的是是否安裝方便,例如有的無人機使用圓形碳纖管作為機臂,這樣很難將電機安裝水平,最終也會影響無人機的控制效果。

無人機底部示意圖
電機與電調也是至關重要的,廉價的電機電調往往不僅容易燒壞,而且炸機后是否容易軸偏,導致無人機動力不平衡。

電調連接
此外,這些電機電調還有看不到的缺陷,例如響應不夠平滑,響應延遲大等。相反,一套優異的動力系統不僅能保證無人機的高性能,還能使用很久,免去維修所用的時間。
除了機架、電機與電調,螺旋槳與電機的匹配,選4S還是6S鋰電池等也很有講究。飛控與傳感器更是需要長期使用的經驗才能做出合適的選擇。
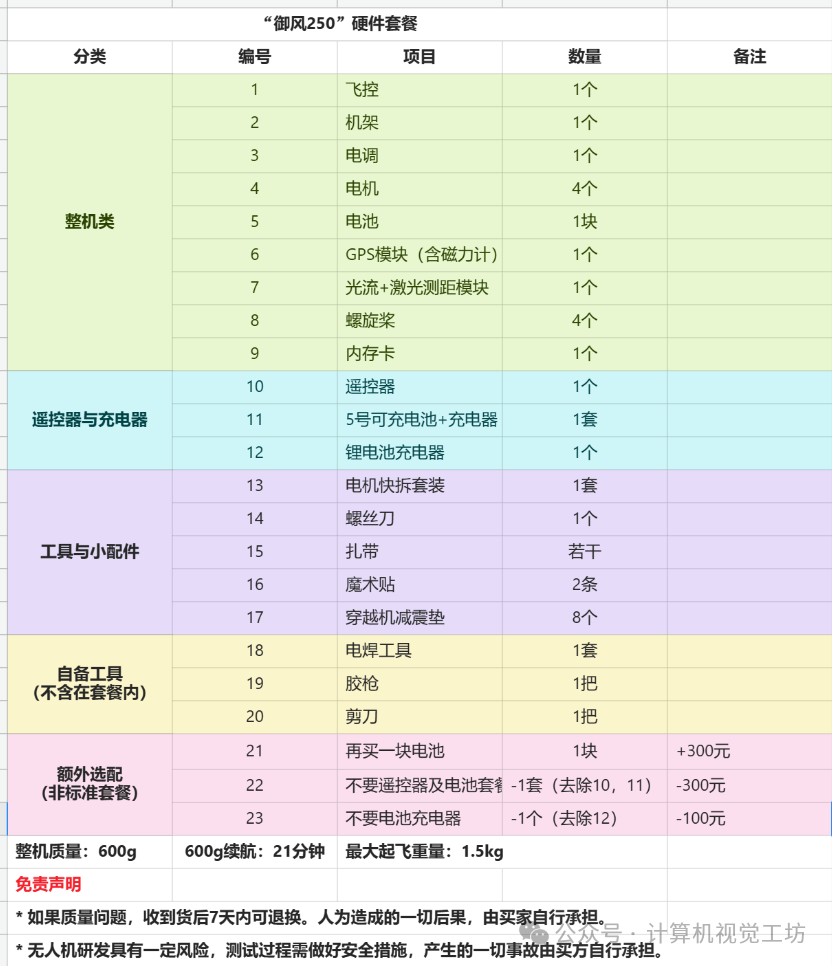
此處針對學習與對科研場景,采用優質飛行套件,推出一個高性能的微型四旋翼平臺——御風250。
「御風250」無人機, 「御風250」-四旋翼無人機(基于PX4)[硬件+代碼]
御風250具備三大方面的優勢,一是模塊選型、二是仿真套件、三是課程支持。
首先,御風250通過選擇合適的模塊,機架采用寬邊X型布局,軸距225mm,總質量600g,續航21分鐘。御風250支持PX4固件,配備的傳感器為IMU、磁力計、氣壓計、GPS、光流與激光測距模塊,支持室內外定點穩定懸停。

光流安裝
該無人機的優勢見下表:
| 比較項目 | 傳統四旋翼 | 御風250 |
|---|---|---|
| 飛控 | 體積大,需要單獨安裝減震板,安裝不方便 | 30*30mm,體積小,質量輕;固定孔安裝,自帶減震球,安裝方便;支持PX4固件,支持二次開發 |
| 機架 | 塑料機架,強度低,振動大,原始值往往1g左右 | 高強度碳纖機架,強度高,振動小,實測振動大約0.2g |
| 電調 | 廉價電調,易損壞,不支持Dshot協議 | 高質量四合一電調,體積小;峰值電流50A,適應瞬時加速;支持Dshot協議,更低延遲 |
| 電機 | 廉價電機,易損壞,響應慢 | 高性能電機,耐炸,響應迅速 |
| GPS | 搜星數量少,定位精度低 | 正常搜星25顆左右,定位精度高 |
| 光流與激光測距 | 光滑地面、強光與弱光常見下定位效果差 | 光滑地面、室外陽光下、晚上室內燈光等情況下依舊能穩定定位 |
| 電池 | 廉價電池,壽命短 | 高質量鋰電池,壽命長 |
| 遙控器 | 常規 | 常規+送充電電池套裝 |
| 工具 | 無 | 送螺絲刀、電機快拆工具等,方便使用 |
其次,提供該無人機的模型參數與對應的Gazebo仿真環境。
此處提供無人機的質量、轉動慣量、油門拉力曲線與升力系數等物理量,擁有這些參數,就可以在仿真環境中搭建對應的無人機模型。
擁有仿真環境,一方面可以驗證控制邏輯。通過在仿真環境中測試,消除自身算法邏輯問題,仿真通過再將代碼下載到實物平臺,有效降低炸機風險。另一方面可以驗證控制算法,在新設計一種控制算法時,往往很難知道參數大致為多少,數量級有時都很難確定,通過在仿真環境里調節,降低人力物力成本。其實,當模型參數精度較高時,甚至可以根據理論得到參數的合理范圍,極大提高設計效率,實現從理論到實際的跨越。

飛控與GPS安裝
最后,從零搭建一套御風250硬件系統,我們為大家配備了配備兩門課程。
課程包括仿真課程與實物課程
仿真課程:零基礎入門四旋翼建模與控制(MATLAB仿真)[理論+實戰]
仿真課程包括理論基礎與MATLAB仿真。
實物課程:基于PX4實現的四旋翼建模與控制
實物課程包括三個模塊,一是帶領學員調試無人機,讓飛機穩定地飛起來;二是帶領學員學習PX4控制部分的代碼,學懂這一大模塊的代碼,對PX4其他部分代碼也能觸類旁通;三是帶領學員更換新的控制器,使得學員能夠將先進的控制算法部署到PX4平臺。

整機實物圖
-
3D
+關注
關注
9文章
2875瀏覽量
107485 -
無人機
+關注
關注
229文章
10420瀏覽量
180138 -
px4
+關注
關注
0文章
7瀏覽量
3951
原文標題:為什么無人機永遠離不開PX4?
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論