") AGV智能無(wú)人搬運(yùn)車(chē)如何實(shí)現(xiàn)自動(dòng)化運(yùn)作
AGV智能無(wú)人搬運(yùn)車(chē)如何實(shí)現(xiàn)自動(dòng)化運(yùn)作
AGV
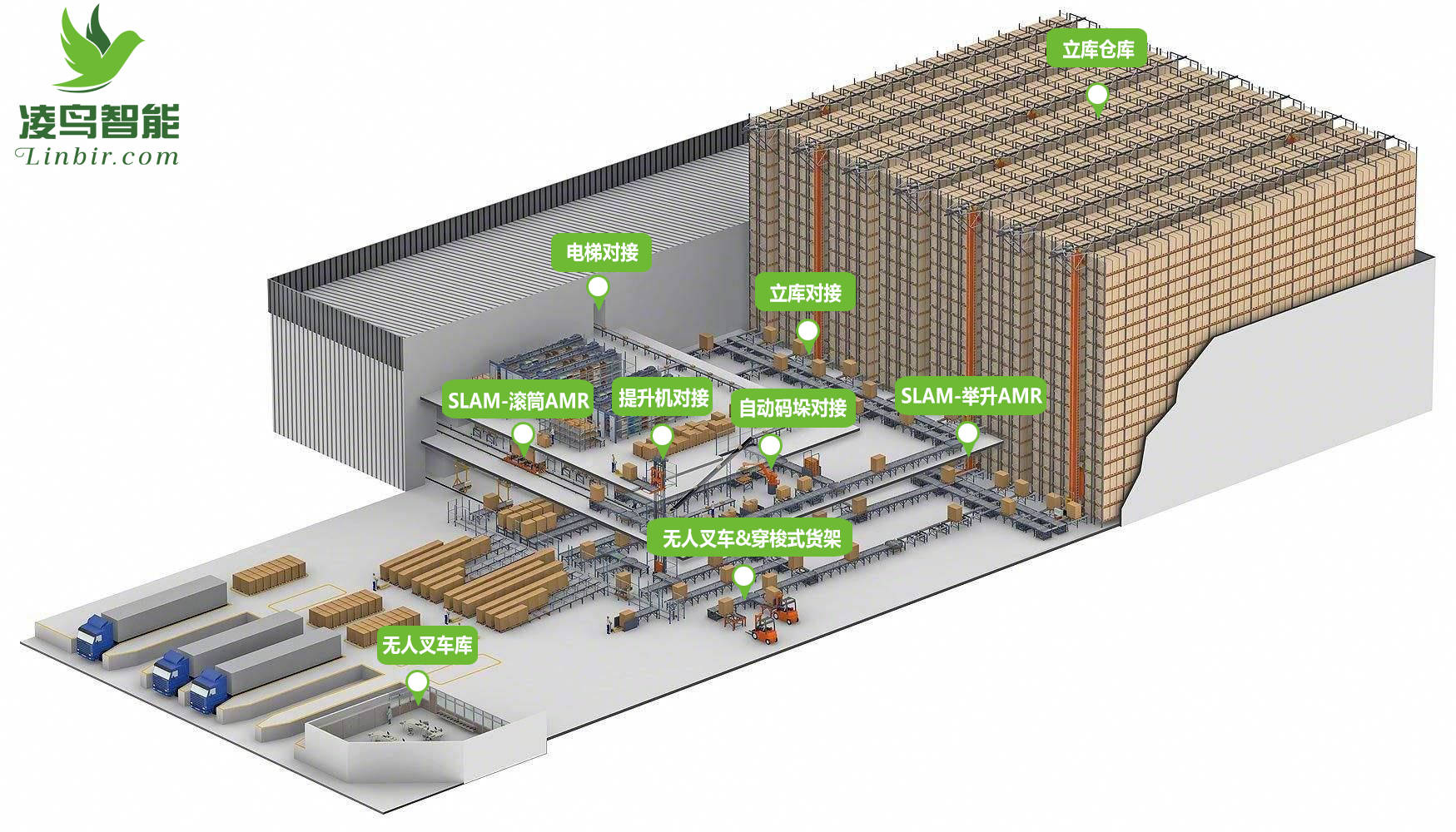
在倉(cāng)儲(chǔ)或生產(chǎn)物流中,AGV作為輔助設(shè)備,主要負(fù)責(zé)物料的搬運(yùn)。其搬運(yùn)任務(wù)通常來(lái)自WMS或MES,AGV配合其他設(shè)備完成物料的出、入庫(kù)功能,涵蓋了原料入庫(kù)、原料出庫(kù)、成品(半成品)入庫(kù)、成品(半成品)出庫(kù)等各環(huán)節(jié)。
AGV倉(cāng)儲(chǔ)物流
AGV智能無(wú)人搬運(yùn)車(chē)的智能控制技術(shù)是其實(shí)現(xiàn)自動(dòng)化操作的核心。控制系統(tǒng)采用高性能處理器和先進(jìn)的算法,對(duì)AGV小車(chē)的各項(xiàng)參數(shù)進(jìn)行實(shí)時(shí)監(jiān)測(cè)和分析,并通過(guò)決策算法進(jìn)行自主控制。智能控制系統(tǒng)具備以下功能:
a、自主導(dǎo)航:根據(jù)電磁導(dǎo)航路徑,智能控制系統(tǒng)自動(dòng)規(guī)劃行駛路線,避開(kāi)障礙物,實(shí)現(xiàn)無(wú)人駕駛。
b、 目標(biāo)搜索與追蹤:AGV小車(chē)在作業(yè)區(qū)域內(nèi)搜索待搬運(yùn)物品,并根據(jù)物品位置、重量等信息制定搬運(yùn)方案。
c、協(xié)同作業(yè):多臺(tái)AGV小車(chē)根據(jù)任務(wù)需求,進(jìn)行協(xié)同調(diào)度、路徑優(yōu)化,提高作業(yè)效率。
d、智能充電:當(dāng)AGV小車(chē)電量不足時(shí),智能控制系統(tǒng)會(huì)自動(dòng)尋找充電站進(jìn)行充電,充電完成后繼續(xù)執(zhí)行任務(wù)。

地牛AGV
路徑規(guī)劃導(dǎo)航技術(shù)
AGV小車(chē)通過(guò)傳感器實(shí)時(shí)獲取自身位置和姿態(tài)信息,從而實(shí)現(xiàn)路徑導(dǎo)航。當(dāng)下,隨著新技術(shù)的應(yīng)用,包括北斗導(dǎo)航、自然視覺(jué)導(dǎo)航等新的技術(shù)的推廣,使得AGV路徑規(guī)劃導(dǎo)航能力獲得了明顯的提升。通過(guò)多年的實(shí)際應(yīng)用,目前實(shí)際應(yīng)用中的小車(chē)已具備抗干擾能力強(qiáng)、定位精度高、可靠性好等特點(diǎn),能滿(mǎn)足各種復(fù)雜環(huán)境的作業(yè)需求。
安全保障
a、避障功能傳:AGV小車(chē)上裝有各類(lèi)傳感器,如激光雷達(dá)、攝像頭、超聲波傳感器等,用于檢測(cè)周?chē)h(huán)境,已避免與路徑上的人員車(chē)輛或物品的碰撞。
b、視覺(jué)識(shí)別:通過(guò)對(duì)攝像頭采集的圖像進(jìn)行分析,識(shí)別物體形狀、顏色等信息,實(shí)現(xiàn)目標(biāo)搜索與追蹤。

AGV機(jī)器人
AGV智能無(wú)人搬運(yùn)車(chē)通過(guò)無(wú)線通信技術(shù)與中央控制系統(tǒng)進(jìn)行數(shù)據(jù)交互,實(shí)現(xiàn)任務(wù)接收、指令下發(fā)、狀態(tài)反饋等功能。無(wú)線通信技術(shù)采用專(zhuān)用頻段,具有信號(hào)穩(wěn)定、抗干擾能力強(qiáng)、傳輸速率高等優(yōu)點(diǎn)。通過(guò)無(wú)線通信,AGV小車(chē)可以實(shí)時(shí)接收中央控制系統(tǒng)下發(fā)的任務(wù)指令,如搬運(yùn)路徑、目的地、作業(yè)順序等,并根據(jù)指令執(zhí)行相應(yīng)操作。
審核編輯 黃宇
-
AGV
+關(guān)注
關(guān)注
27文章
1302瀏覽量
41074 -
AGV小車(chē)
+關(guān)注
關(guān)注
4文章
168瀏覽量
11099
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
AGV在倉(cāng)儲(chǔ)物流中的應(yīng)用

agv搬運(yùn)機(jī)器人是怎么實(shí)現(xiàn)無(wú)人搬運(yùn)的?

Agv小車(chē)能對(duì)接哪些自動(dòng)化設(shè)備?最后一個(gè)你絕對(duì)想不到
Agv小車(chē)有哪些車(chē)型?特點(diǎn)和優(yōu)勢(shì)是什么?適用哪些場(chǎng)景?

什么是AGV小車(chē)?有什么功能?適用于哪些場(chǎng)景?
AGV搬運(yùn)機(jī)器人的“雙腿”——AGV系統(tǒng)
智能時(shí)代小巨人:地牛AGV搬運(yùn)機(jī)器人

會(huì)“坐”電梯,能避障礙,AGV無(wú)人搬運(yùn)車(chē)進(jìn)入各行各業(yè)

agv無(wú)人搬運(yùn)車(chē)工作原理
AGV的發(fā)展方向

解析無(wú)人叉車(chē)在自動(dòng)化立體庫(kù)的4大應(yīng)用 看過(guò)最后一個(gè) 算我輸

AGV叉車(chē)自動(dòng)化存取貨場(chǎng)景到底有哪些?

引入AGV無(wú)人搬運(yùn)叉車(chē)前應(yīng)該進(jìn)行的有效溝通
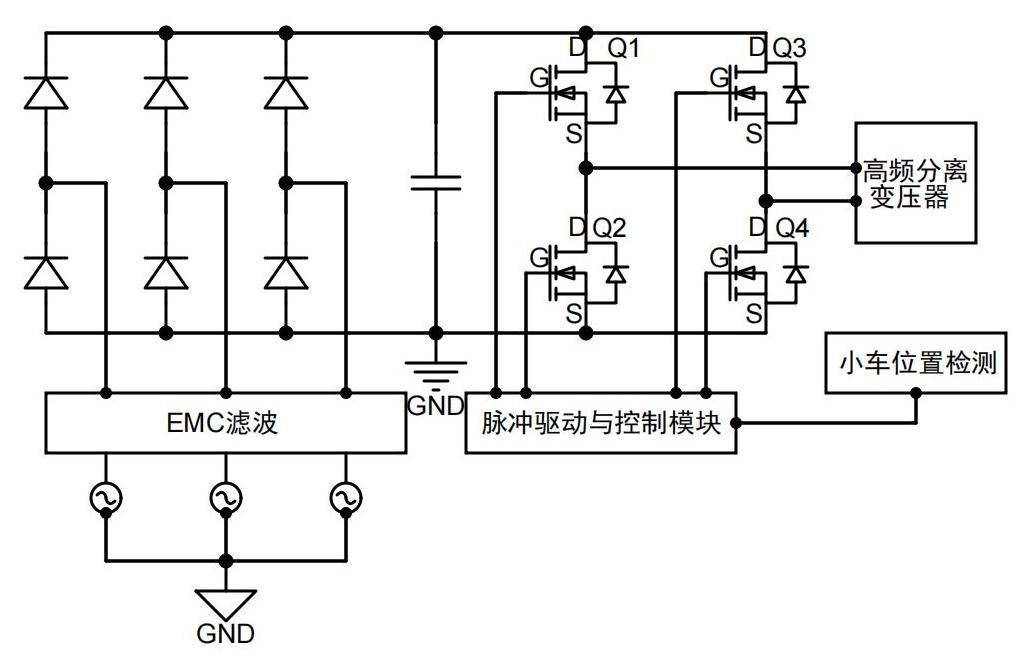
超結(jié)MOS在AGV無(wú)人搬運(yùn)車(chē)上的應(yīng)用

超結(jié)MOS在AGV無(wú)人搬運(yùn)車(chē)上的應(yīng)用-REASUNOS瑞森半導(dǎo)體





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論