 采用峰值電流模式控制的功率因數校正
采用峰值電流模式控制的功率因數校正
在上期中,我們介紹了實現 1mV 輸出電壓紋波的三種不同控制架構,并提供使用相同電氣規格的測試數據以及輸出電壓紋波、解決方案尺寸、負載瞬態和效率的比較結果。
本期,為大家帶來的是《采用峰值電流模式控制的功率因數校正》,我們將深入探討控制 PFC 并實現單位功率因數的新方法 - 一種特殊的峰值電流模式。這種方法不需要電流采樣電阻,因此消除了功率損耗。雖然它仍使用電流互感器來檢測開關電流,但無需在 PWM 導通時間的中間進行采樣,從而避免了采樣位置偏移問題。除此以外還有其他好處。
引言
當處理 75W 以上的功率級別時,離線電源需要功率因數校正 (PFC)。PFC 的目標是控制輸入電流以跟隨輸入電壓,從而使負載看起來像是純電阻器。對于正弦交流輸入電壓,輸入電流也需為正弦電流。要控制輸入電流,必須對其進行檢測。
設計人員通常會在 PFC 應用中使用以下兩種電流檢測方法的其中之一。第一種方法是在 PFC 接地回路中放置一個電流采樣電阻器(在圖 1 中指定為 R1)以檢測輸入電流,該電流將送至平均電流模式控制器(如圖 2 所示),以強制輸入電流跟隨輸入電壓。由于電流采樣電阻器可檢測全部升壓電感器電流,因此這種電流檢測方法可提供良好的功率因數并降低總計諧波失真 (THD)。不過,電流采樣電阻器會導致額外的功率損耗,這在需要高效率的應用中可能是個問題。
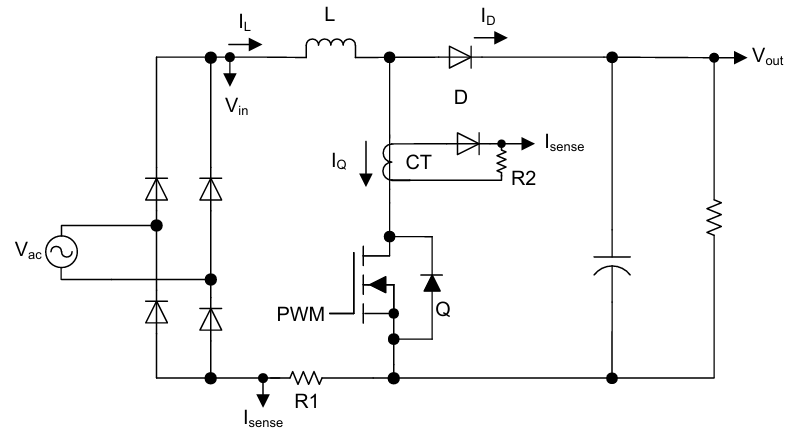
圖 1. PFC 的常用電流檢測方法
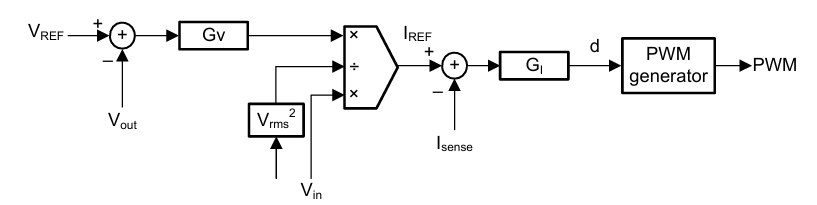
圖 2. PFC 的傳統平均電流模式控制
第二種方法是將電流互感器與升壓開關串聯以檢測開關電流(在圖 1 中指定為 CT 和 R2)。如果無法使用電流采樣電阻(例如對于交錯 PFC 和 semi-bridgeless PFC),最好使用這種方法。電流互感器僅檢測開關電流 (IQ)(而非全部電感器電流),因此要控制全部電感器電流,一種簡單的解決方案是在電流互感器輸出的中間(脈寬調制 [PWM] 導通時間的中間)進行采樣。采樣將起作用,因為在連續導通模式 (CCM) 下,中點瞬時電流值等于平均電感器電流值(如圖 3 所示)。與第一種方法相比,這種方法的功率損耗更少,但也存在限制:PFC 的占空比在 0% 至 100% 之間變化。當占空比較小時,PWM 導通時間很短;因此,很難在 PWM 導通時間的中間準確采樣。任何采樣位置偏移都會導致反饋信號誤差,并使 THD 和功率因數變差。
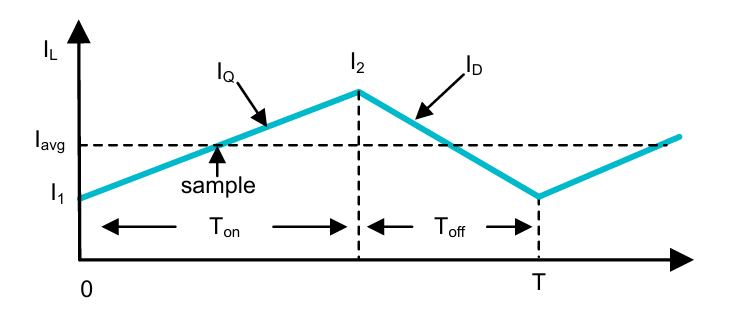
圖 3. CCM 下的 PFC 電感器電流波形
本文檔介紹了控制 PFC 并實現單位功率因數的新方法 - 一種特殊的峰值電流模式。這種方法不需要電流采樣電阻,因此消除了功率損耗。雖然它仍使用電流互感器來檢測開關電流,但無需在 PWM 導通時間的中間進行采樣,從而避免了采樣位置偏移問題。除此以外還有其他好處。
CCM PFC 的峰值電流模式控制
峰值電流模式控制廣泛用于直流/直流轉換器,但它不適用于 PFC,因為 PFC 需要控制平均電流,而不是峰值電流。控制電感器峰值電流會導致較差的 THD 和較低的功率因數。
通過使用特殊的 PWM 發生器(如圖 4 所示),PFC 可以實現峰值電流模式控制。圖 4 比較了檢測到的開關電流 IQ 與鋸齒波。鋸齒波峰值電壓 (VRAMP) 在每個開關周期開始時開始,其幅度在開關周期結束時線性下降至 0V。升壓開關 (Q) 在開關周期開始時導通。當 IQ 超過鋸齒波時,Q 關斷。
這種 PWM 發生器已存在于幾乎所有數字電源控制器中,例如 TI 的 C2000 實時微控制器和 UCD3138。這些數字控制器具有一個帶可編程斜率補償的峰值電流模式控制模塊。對具有斜率 VRAMP/T 的補償進行編程可生成預期的鋸齒波。
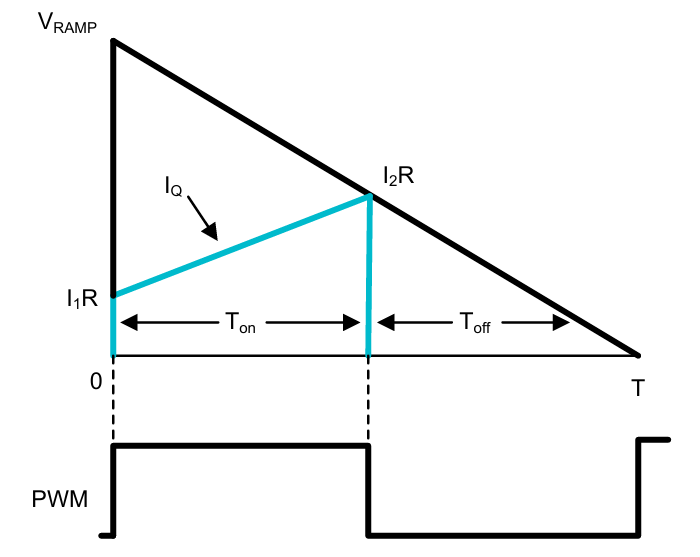
圖 4. CCM 中建議方法的 PWM 波形生成
要實現單位功率因數,可通過方程式 1 計算鋸齒波 VRAMP 的峰值:
方程式 1
其中 Gv 是電壓環路輸出,Vout 是 PFC 輸出電壓,L 是升壓電感器的電感,R 是電流互感器輸出端的電流檢測電阻,Ton 是 PFC PWM 導通時間。
由于 PWM 導通時間在兩個連續開關周期中幾乎相同,因此您可以使用上一開關周期中的 Ton 信息來計算此開關周期的 VRAMP 值。
了解如何使用此控制方法實現單位功率因數。從圖 3 可以看出,在 Ton 時間內,輸入電壓施加到電感器,導致電感器電流從 I1 上升到 I2。采用方程式 2:
方程式 2
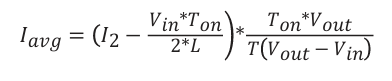
其中 Vin 是 PFC 輸入電壓。方程式 3 計算每個開關周期中的平均電感器電流:
方程式 3
將方程式 2 代入方程式 3 可得到方程式 4:
方程式 4
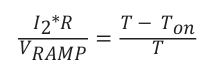
從圖 4 中,方程式 5 為:
方程式 5
方程式 6 適用于在 CCM 穩定狀態下運行的 PFC:
方程式 6
將方程式 6 代入方程式 5 并求解 I2 可得到方程式 7:
方程式 7
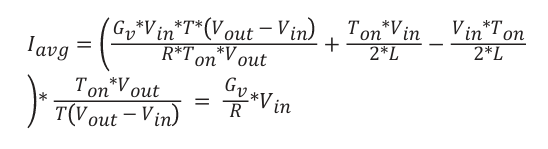
將方程式 1 和方程式 7 代入方程式 4 可得到方程式 8:

方程式 8
在方程式 8 中,Gv 是 PFC 電壓環路輸出。它在穩定狀態下是恒定的;因此,Iavg 與 Vin 成正比,并跟隨 Vin 的形狀。如果 Vin 是正弦波,則 Iavg 也是正弦波。控制電感器峰值電流可實現單位功率因數。
與傳統的平均電流模式控制相比,這種方法消除了電流采樣電阻器引起的功率損耗。與需要精確采樣位置的電流互感器檢測方法相比,該方法無需對電流進行采樣。模擬比較器會確定 PWM 關斷瞬間,從而避免了采樣偏移問題。
為了節省系統成本,一些設計人員更喜歡使用組合控制,通過單個控制器控制 PFC 和直流/直流控制器。您可以將組合控制器置于交流/直流電源的初級側或次級側;每一側都有其優缺點。如果選擇將組合控制器置于初級側,則需要跨越隔離邊界,將直流/直流輸出電壓和電流信息發送到初級側,并且控制器和主機之間的通信也需要跨越隔離邊界。如果選擇將組合控制器置于次級側,因為傳統的平均電流模式控制方法需要輸入交流電壓信息,因此必須檢測輸入電壓并將其用于調制電流環路基準。跨越隔離邊界檢測輸入電壓頗具挑戰。
在新控制方法中,方程式 1 僅包括 Vout,不包括 Vin。因為不需要檢測 Vin,所以可以去除 Vin 檢測電路。此控制方法僅需要電流互感器輸出和 Vout 信息。由于電流互感器提供隔離,因此低成本的光耦合器可以檢測 Vout 并將其送至次級側。然后,您可以將 PFC 控制器放置在交流/直流電源的次級側,并將其與同樣位于次級側的直流/直流控制器組合以構建組合控制器,從而大大降低系統成本。
DCM PFC 的峰值電流模式控制
您可以將相同算法擴展到不連續導通模式 (DCM) 運行。圖 5 顯示了 DCM 中的電感器電流波形。電感器電流在 Toff 結束時下降為零,并在其余 Tdcm 期間保持為零;因此,T = Ton + Toff + Tdcm。PWM 波形發生器與圖 4 相同,但 PWM 關斷時間為 Toff + Tdcm,而不是 Toff(如圖 6 所示)。
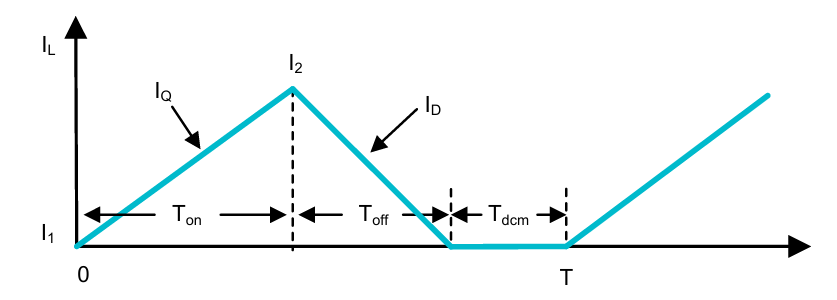
圖 5. DCM 下的 PFC 電感器電流波形
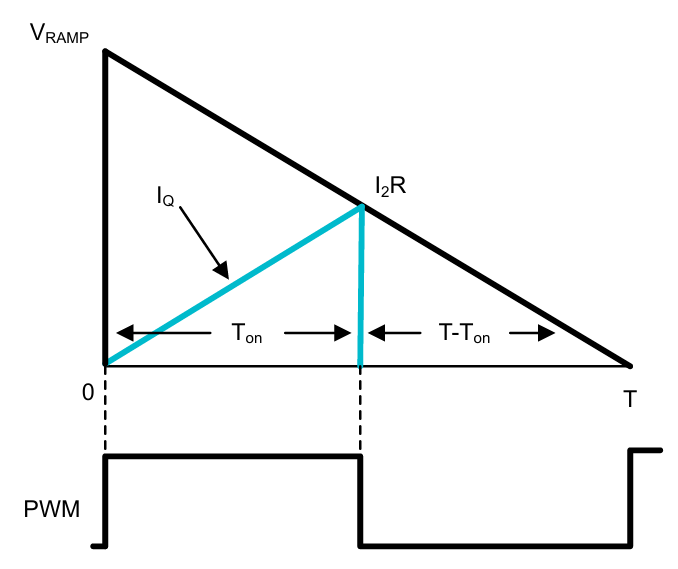
圖 6. DCM 中建議方法的 PWM 波形生成
將方程式 4 重寫為方程式 9 可計算一個開關周期內 DCM 下的平均電流:

方程式 9
在穩定狀態下,電感器伏秒必須在每個開關周期中保持平衡,從而得到方程式 10:

方程式 10
求解 Toff 并代入方程式 9 可得到方程式 11:
方程式 11
從方程式 6 中,方程式 12 為:
方程式 12
方程式 13 計算鋸齒波 Vramp 的峰值:

方程式 13
將方程式 13 代入方程式 12 并求解 I2 可得到方程式 14:

方程式 14
將 I2 代入方程式 11 可得到方程式 15:
方程式 15
在方程式 15 中,Gv 在穩定狀態下是恒定的;因此,Iavg 與 Vin 成正比,并跟隨 Vin 的形狀。如果 Vin 是正弦波,那么 Iavg 也是正弦波,從而實現單位功率因數。
從方程式 9 到方程式 15 對 CCM 和 DCM 均有效,因此,如果根據方程式 13 生成了鋸齒波信號峰值,則可以為 CCM 和 DCM 實現單位功率因數。
方程式 1 是方程式 13 的特殊情況,其中 T = Ton + Toff。對于輕負載(PFC 在輕負載下處于 DCM 模式)、THD 和功率因數不太重要的應用,可使用公式 1 來簡化實現。
測試結果
已在 360W PFC 評估模塊 (EVM) 上驗證了這一建議的控制方法。圖 7 顯示了輸入電流波形,從中可以看到良好的正弦電流波形。
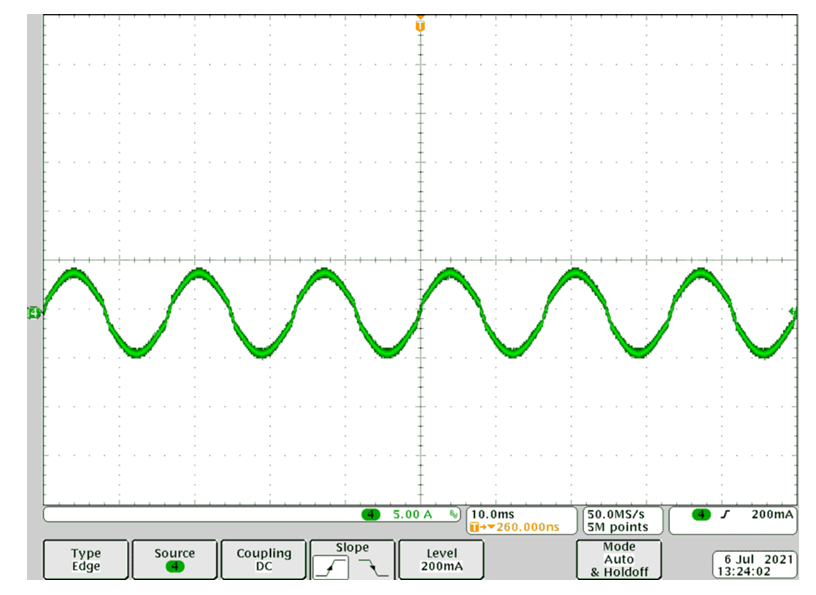
圖 7. 360W PFC EVM 上的測試結果
結論
與傳統的平均電流模式控制方法相比,這種新型 PFC 峰值電流模式控制方法具有許多優勢。通過將 PFC 控制器放置在交流/直流電源的次級側來構建具有直流/直流控制器的組合控制器可以降低成本。消除電流分流電阻器可消除功率損耗,從而提高效率。使用電流互感器時,通過消除因 PWM 占空比較小而產生的反饋信號誤差可改善 THD。最后,通過 C2000 MCU 和 UCD3138 等現有數字電源控制器可輕松實現這種控制方法。
-
德州儀器
+關注
關注
123文章
1706瀏覽量
140691 -
功率因數
+關注
關注
10文章
563瀏覽量
39333 -
PFC
+關注
關注
47文章
969瀏覽量
106035 -
峰值電流
+關注
關注
0文章
58瀏覽量
11977
原文標題:模擬芯視界 | 采用峰值電流模式控制的功率因數校正
文章出處:【微信號:tisemi,微信公眾號:德州儀器】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
采用UC3854的有源功率因數校正電路工作原理與應用
基于功率因數校正的離線式開關電源設計
什么是功率因數校正 PFC?
新穎的電流臨界導通的功率因數校正芯片的研究
什么是功率因數 功率因數校正基礎知識
采用TMS320LF2407A的平均電流模式控制功率因數校正轉換器






 工商網監
工商網監
評論