

概述
YOLOv10 是由清華大學研究人員利用 Ultralytics Python 軟件包開發的,它通過改進模型架構并消除非極大值抑制(NMS)提供了一種新穎的實時目標檢測方法。這些優化使得模型在保持先進性能的同時,降低了計算需求。大量實驗表明,YOLOv10 在各種模型規模上提供了更優的準確率-延遲權衡。
正如讀過我之前文章的朋友所知道的,我分享了使用 YOLO 模型的各種項目,因為在預訓練模型中,YOLO 模型在性能和效率方面明顯優于其他模型。然而,實時目標檢測由于依賴非極大值抑制(NMS)和架構效率低下而面臨挑戰。YOLOv10 通過消除 NMS 并采用專注于效率和準確性的設計策略解決了這些問題。
架構
來自 Ultralytics 的圖示
骨干網絡:負責特征提取,YOLOv10 的骨干網絡使用增強版的 CSPNet(交叉階段部分網絡)來改善梯度流動并減少計算冗余。
頸部網絡:設計用于聚合不同尺度的特征并將其傳遞到頭部網絡。它包含用于有效多尺度特征融合的 PAN(路徑聚合網絡)層。
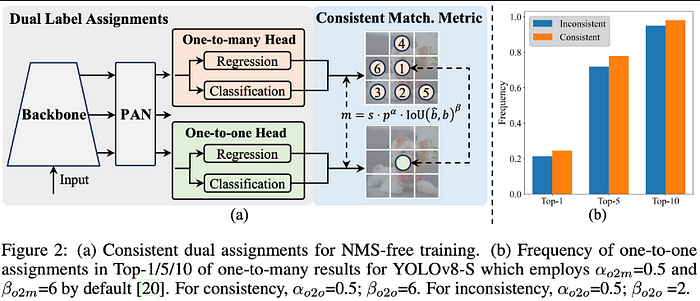
一對多頭:在訓練過程中為每個對象生成多個預測,以提供豐富的監督信號并提高學習準確性。
一對一頭:在推理過程中為每個對象生成一個最佳預測,消除 NMS 的需要,從而減少延遲并提高效率。
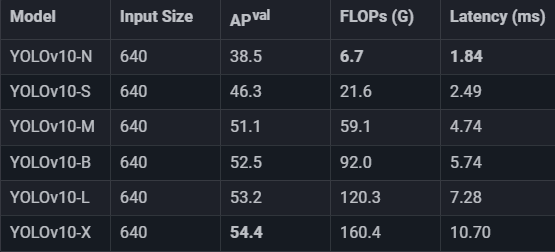
模型變體及性能YOLOv10 提供六種模型:
YOLOv10-N:用于極其資源受限環境的納米版。
YOLOv10-S:平衡速度和準確性的小型版。
YOLOv10-M:用于通用的中型版。
YOLOv10-B:增加寬度以提高準確性的平衡版。
YOLOv10-L:在增加計算資源成本的情況下提高準確性的高級版。
YOLOv10-X:用于最大化準確性的超大型版。
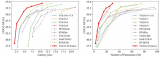
來自 Ultralytics 的圖示
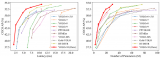
比較讓我們看看在標準基準(如 COCO)上測試的不同模型在延遲和準確性方面的比較。
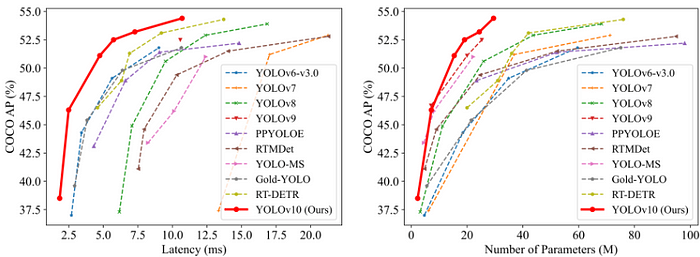
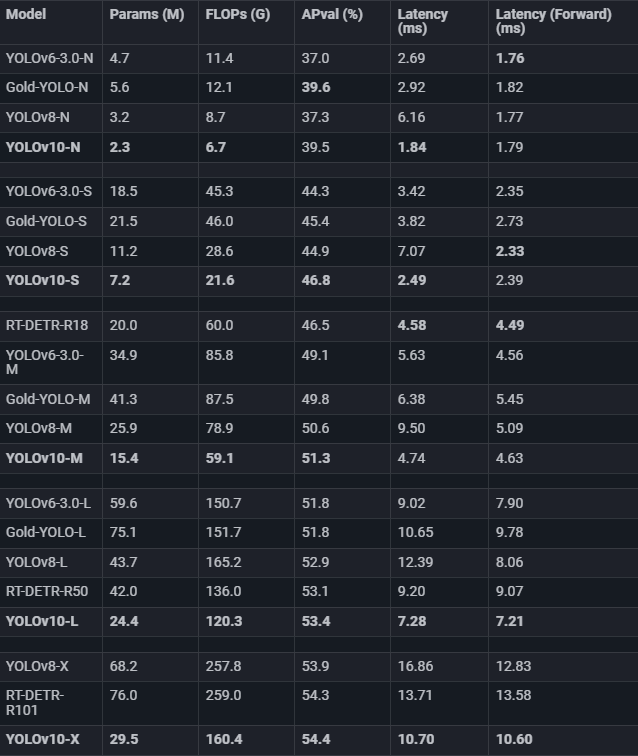
很明顯,YOLOv10 是實時目標檢測應用的前沿技術,以更少的參數提供更高的準確性和速度性能。
訓練 YOLOv10 進行自定義目標檢測首先,克隆官方 YOLOv10 GitHub 倉庫以下載必要的 yolov10n 模型。
!pip install -q git+https://github.com/THU-MIG/yolov10.git !wget -P -q https://github.com/jameslahm/yolov10/releases/download/v1.0/yolov10n.pt
您可以在 Roboflow Universe 上嘗試任何自定義項目,創建自己的數據集,甚至使用由 Intel 贊助的 RF100 數據集。對于本文,我將使用一個預先準備好的數據集,用于檢測 X 射線圖像中的危險物品。數據集鏈接:https://universe.roboflow.com/vladutc/x-ray-baggage
使用 Roboflow API 以 YOLOv8 格式下載您的模型。
!pip install -q roboflow from roboflow import Roboflow rf = Roboflow(api_key="your-api-key") project = rf.workspace("vladutc").project("x-ray-baggage") version = project.version(3) dataset = version.download("yolov8")
配置參數,開始訓練:
!yolo task=detect mode=train epochs=25 batch=32 plots=True model='/content/-q/yolov10n.pt' data='/content/X-Ray-Baggage-3/data.yaml'
示例 data.yaml 文件
names: - Gun - Knife - Pliers - Scissors - Wrench nc: 5 roboflow: license: CC BY 4.0 project: x-ray-baggage url: https://universe.roboflow.com/vladutc/x-ray-baggage/dataset/3 version: 3 workspace: vladutc test: /content/X-Ray-Baggage-3/test/images train: /content/X-Ray-Baggage-3/train/images val: /content/X-Ray-Baggage-3/valid/images
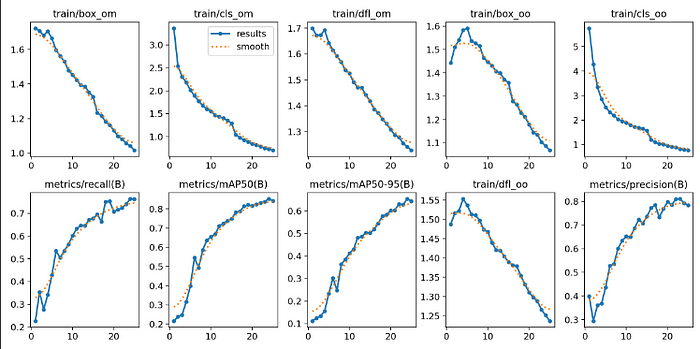
讓我們看看結果。
Image(filename='/content/runs/detect/train/results.png', width=1000)
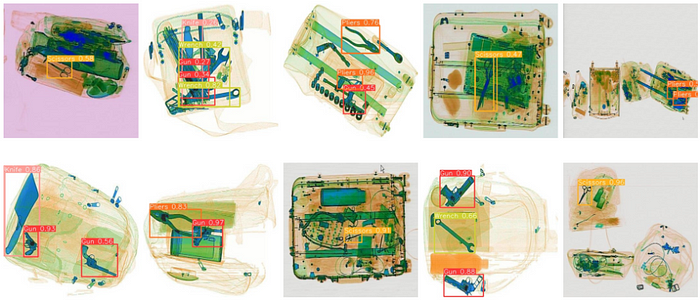
讓我們預測測試數據并在 5x2 網格中顯示結果。
from ultralytics import YOLOv10 model_path = '/content/runs/detect/train/weights/best.pt' model = YOLOv10(model_path) results = model(source='/content/X-Ray-Baggage-3/test/images', conf=0.25,save=True)
import glob
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
images = glob.glob('/content/runs/detect/predict/*.jpg')
images_to_display = images[:10]
fig, axes = plt.subplots(2, 5, figsize=(20, 10))
for i, ax in enumerate(axes.flat):
if i < len(images_to_display):
img = mpimg.imread(images_to_display[i])
ax.imshow(img)
ax.axis('off')
else:
ax.axis('off')
plt.tight_layout()
plt.show()
-
目標檢測
+關注
關注
0文章
220瀏覽量
15839 -
數據集
+關注
關注
4文章
1220瀏覽量
25183
原文標題:YOLOv10 自定義目標檢測 | 理論+實踐
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何添加自定義單板
使用OpenVINO? 2021.4在CPU和MYRIAD上進行自定義對象檢測,為什么結果差異巨大?
如何快速創建用戶自定義Board和App工程


think-cell:自定義think-cell(四)

think-cell;自定義think-cell(一)

Flexus X 實例 ultralytics 模型 yolov10 深度學習 AI 部署與應用

YOLOv10:引領無NMS實時目標檢測的新紀元


用OpenVINO C# API在intel平臺部署YOLOv10目標檢測模型
HarmonyOS開發案例:【 自定義彈窗】
TSMaster 自定義 LIN 調度表編程指導






 工商網監
工商網監

評論