 軟件定義車輛加速推進汽車電子技術的未來發展
軟件定義車輛加速推進汽車電子技術的未來發展
汽車原始設備制造商 (OEM) 持續致力于改善乘員的體驗、簡化無線更新、降低設計和制造的成本、收集更多的車輛數據并創造新的收入來源。然而,當今基于域的車輛架構無法輕松有效地滿足這些需求,這也促使制造商轉向軟件定義車輛和區域架構。通過集中管理軟件并將硬件與軟件分離,軟件定義車輛成為實現更智能、更安全和更節能車輛過程中的下一階段目標。
本次為大家介紹的是《軟件定義車輛加速推進汽車電子技術的未來發展》白皮書。本文將討論具有區域架構的軟件定義車輛如何推動開發更智能、 更安全、更節能的車輛。通過集中管理軟件并將硬件與軟件分離,這種車輛可以更輕松地進行更新、降低成本并提供新功能。
內容概覽
基于域的車輛和軟件定義車輛
了解基于域的車輛架構與軟件定義車輛架構之間的差異。
如今,基于域的架構在提供可擴展軟件方面效率低下,而汽車制造商可以通過無線更新輕松維護這些軟件。如果車輛功能可能需要跨多個域進行通信和控制,對車輛功能的控制進行細分將使軟件開發變得復雜化,更新這些系統的軟件具有挑戰性。相比之下,采用區域架構的軟件定義車輛,通過集中軟件簡化無線更新,通過將車輛硬件與高層應用軟件分離來實現通過軟件添加新功能的靈活性,并在不同車型和飾件之間提供了更具成本效益的可擴展性。
圖 1 展示了一個區域架構示例,該架構將軟件集中在中央計算系統中,并實施區域控制模塊以匯總數據、驅動負載和執行本地配電。
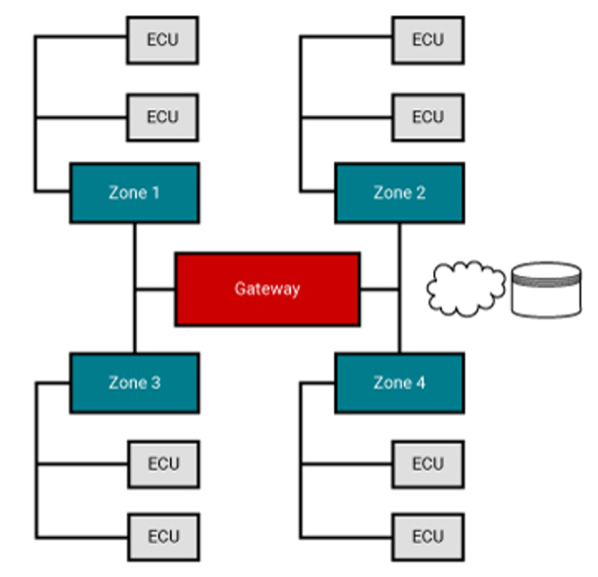
圖 1:車輛區域架構圖
軟件定義車輛支持的新技術
了解軟件定義車輛如何增強數字孿生等技術以優化車輛性能。
軟件定義車輛為 OEM提供了新技術和收入來源。隨著車輛不斷集成更多的電子器件和傳感器,車輛性能、故障場景和駕駛員偏好數據比以往任何時候都更容易獲得。軟件定義車輛可以簡化車輛數據收集過程并安全共享車輛數據,有助于進一步改善數字孿生和車聯網 (V2X) 功能。
利用數字孿生功能(真實系統的虛擬表示),軟件定義車輛可將數據共享到云端以記錄真實性能數據,如電動汽車電池隨時間變化的健康狀態、各種行駛條件下的 ADAS 傳感器信息,甚至車輛功能使用情況,如圖 2 所示。
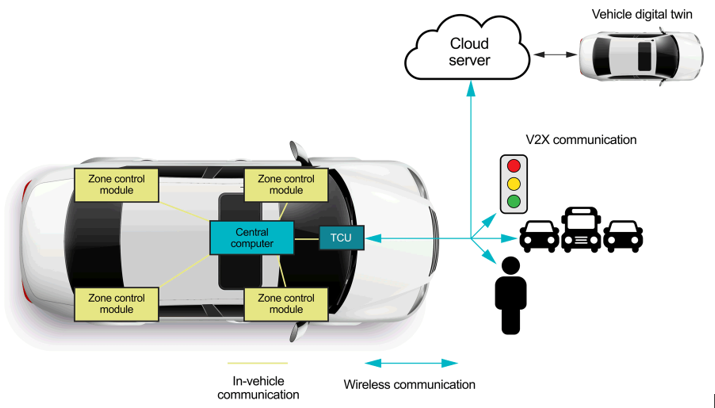
圖 2:軟件定義車輛連接到云和 V2X
軟件定義車輛和區域架構方法的差異
了解根據具體設計要求在車輛中集中管理軟件的不同方法。
每家汽車制造商都采用獨特的方法來實現軟件定義車輛。上一代車輛平臺的遺留問題將迫使許多 OEM 逐步轉向更適合其集中式軟件方法的電氣和電子區域架構。
如圖 3 所示,雖然大多數 OEM 都在開發區域架構,但在決定控制車輛功能的軟件的位置時,卻有不同的方法。
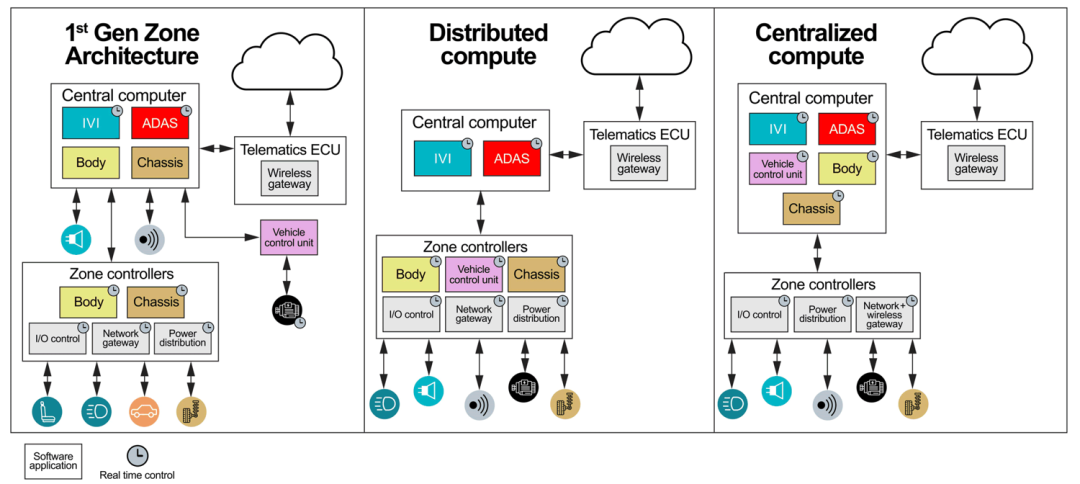
圖 3:車輛架構類型比較
軟件定義車輛正不斷為汽車制造商帶來新的機遇,幫助他們減少開發新車和新功能所需的時間和成本,在車輛整個生命周期內持續改善駕駛體驗,并創造新的收入來源。盡管有多種方法可供選擇,但集中管理車輛軟件并將車輛硬件與軟件分離將是重中之重。總體而言,OEM 可通過區域架構和軟件定義車輛加快開發更智能、更安全、更節能的車輛。
-
汽車電子
+關注
關注
3026文章
7941瀏覽量
166906 -
德州儀器
+關注
關注
123文章
1706瀏覽量
140691 -
軟件定義
+關注
關注
0文章
77瀏覽量
13687
原文標題:白皮書下載|軟件定義車輛加速推進汽車電子技術的未來發展
文章出處:【微信號:tisemi,微信公眾號:德州儀器】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論