 運用MATLAB模型預測控制技術提升風力發電機運行效率
運用MATLAB模型預測控制技術提升風力發電機運行效率
基于模型的設計對我們的開發過程至關重要……這種方法使我們能夠在全尺寸 3 MW 風力發電機上測試控制器的運行。
為了到 2050 年實現凈零排放,風能生產需要維持 17% 同比增長。隨著全球風力發電機(WT)的總裝機容量持續增長,風電行業正在更加注重優化長期運營效率。這不僅包括最大化電力輸出,還包括最小化制造和維護成本——同時確保安全和電網合規。使用基于比例積分 (PI) 或比例積分微分 (PID) 算法的傳統控制策略幾乎無法實現所有這些目標。因此,研究小組一直在探索使用更先進的控制策略,包括模型預測控制(MPC)。
MPC 非常適合 WT 控制應用,因為它可以壓縮優化問題中的多個、有時相互沖突的控制目標和約束。事實上,我們的前同事們之前證明了 MPC 對風力發電機控制的有效性通過使用基于模型的控制器設計和快速控制原型。
最近,我們(亞琛工業大學自動控制研究所的研究人員和 W2E Wind toEnergy GmbH 的工程師團隊)擴展了這項早期工作,將機器學習回歸模型集成到 MPC 中。通過此項改進,控制器主動調整葉片螺距角和發電機扭矩,以最大限度地減少風力發電機的負載交替,旨在降低長期磨損和損壞風險。我們使用的算法源自 IntelliWind 研究項目,資助編號為 01IS22028A/B。基于模型的設計對我們的開發過程起到了重要作用:我們使用了 MATLAB 訓練機器學習模型,將 MPC 內部預測模型的動態狀態映射到轉子推力的變化, Simulink 和 Model Predictive ControlToolbox 對控制器進行建模和廣泛模擬,并使用 Simulink Coder 生成代碼以部署在 Bachmann 工業控制系統上。這種方法使我們能夠在由 W2E Wind toEnergy 運營的全尺寸 3 MW WT 上測試控制器的運行(圖 1),這是驗證該新型控制器設計是否可投入生產的重要一步。
▼
訓練機器學習模型并將其納入 MPC
MPC 的性能和穩定性在很大程度上受到其預測模型的準確性和保真度的影響。鑒于保真度較高的模型通常需要更多計算,因此 MPC 設計需要權衡。例如,將 WT 的完整計算流體動力學模型納入 MPC 是不切實際的,因為從這種模型生成預測所需的時間可能遠遠超過控制器的采樣時間。
為了解決保真度和計算強度之間的設計權衡,我們使用了機器學習模型(具體來說是局部線性神經模糊模型 LLNFM)來快速預測渦輪轉子推力的變化。在 MPC 中,我們將此 LLNFM 與 WT 的非線性降階模型相結合(圖 2)。然而,在將其納入我們的控制設計之前,我們首先需要訓練機器學習模型。
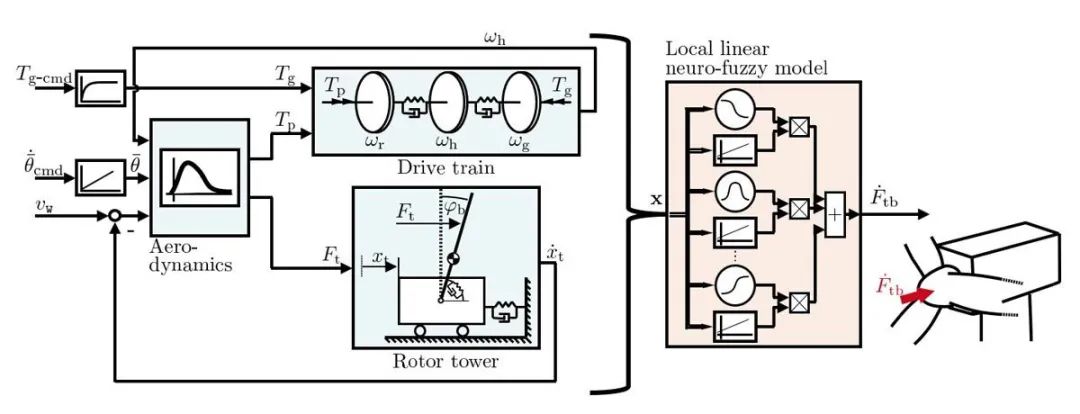
圖 2. 將局部線性神經模糊模型(右)與降階模型(左)相結合,該模型由 WT 傳動系統動力學機械子模型、轉子塔和葉片動力學機械子模型以及空氣動力學第三子模型組成。
訓練任何機器學習模型(包括我們的 LLNFM)都需要數據。我們使用以下方法生成合成訓練數據 alaska/Wind 軟件,我們在該軟件中根據外部風力對轉子上的內部負載進行建模和模擬。具體來說,我們進行了模擬,以測量各種風況(包括不同的速度以及極端的運行陣風)下轉子上的推力。然后我們將這些數據導入 MATLAB 并進行預處理。預處理步驟包括計算時間導數(因為我們想在改變計算推力隨時間的變化)并應用低通濾波器消除由風的隨機因素引起的高頻份額(圖 3)。
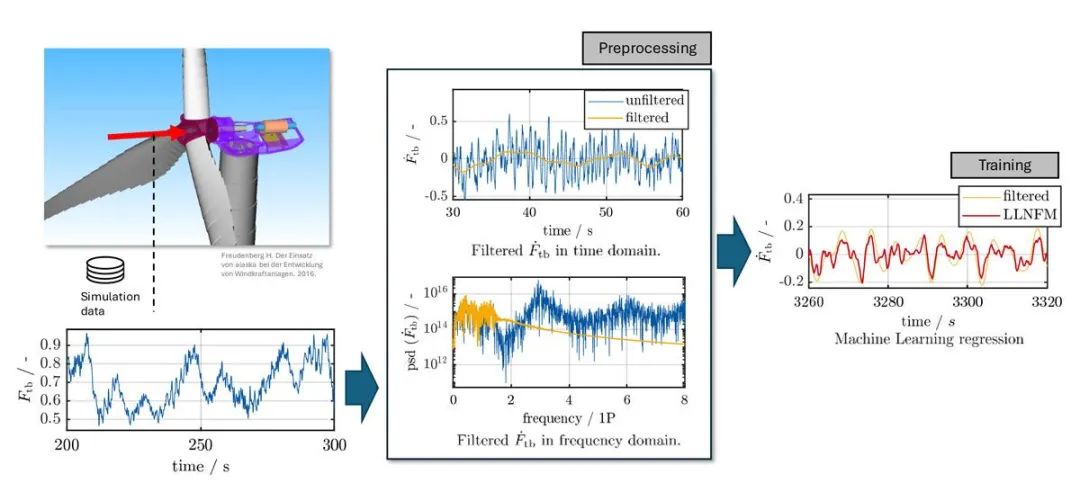
圖 3. 工作流程概述:捕獲模擬數據,預處理數據,然后使用它來訓練局部線性神經模糊模型。
我們使用 LOLIMOT(局部線性模型樹)算法構建并訓練了 LLNFM,該算法由 LMN-Tool,來自錫根大學的 MATLAB 工具箱。我們使用 LLNFM,因為它代表非線性關系,但與其他機器學習技術相比提供了可管理的復雜性。這帶來了更高的可解釋性,這在現實世界的控制應用中是一個優勢,因為在這樣的應用中,最大限度地降低對工廠造成任何潛在損害的風險是一個關鍵關注點。
一旦我們訓練并驗證了 LLNFM,我們就會使用符號框架 CasADi 根據模型創建符號表達式,并根據系統狀態計算模型的雅可比矩陣。我們創建了一個 S-函數基于該模型的符號表達及其雅可比矩陣。在 Simulink 中,此 S-函數被調用來獲取控制器擴展卡爾曼濾波器 (EKF) 中的線性化狀態空間模型,并由自適應 MPC 控制器塊來估計操作條件變化時的預測模型狀態(圖 3)。
▼
模擬和調節控制器
將機器學習模型集成到 MPC 后,我們的下一步是運行模擬來調整控制器并評估其性能。該控制器的設計目的是最大限度地提高功率輸出,同時最大限度地減少結構負荷。
我們以從切入風速到切出風速的各種風速進行了多次模擬。然后,我們在 MATLAB 中分析結果,并將新的機器學習增強型 MPC 與現有 MPC 和基線經典控制系統的性能進行了比較。雖然機器學習增強型 MPC 對部分負載狀態(風速較低)下的推力動態影響很小,但在滿載狀態(風速較高)下,它降低了主要第一塔特征模態周圍頻率范圍內的推力動態(圖 4)。模擬結果表明,機器學習增強型 MPC 產生的功率與現有 MPC 相似(圖 5)。
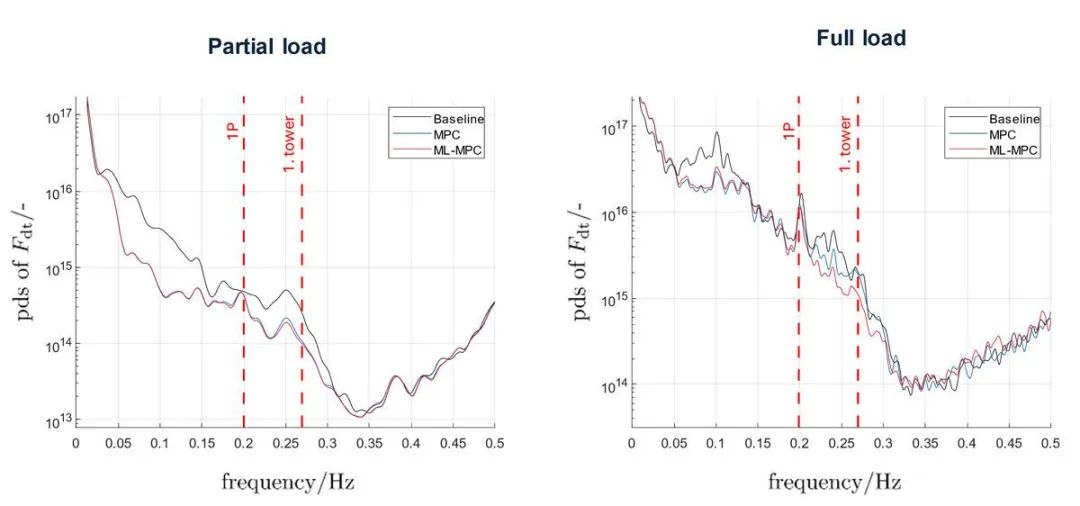
圖 4. 三種類型的控制器在部分負載條件(左)和滿負載條件(右)下的推力功率譜密度圖:基線(黑色)、無機器學習的 MPC(藍色)和有機器學習的 MPC(紅色)。
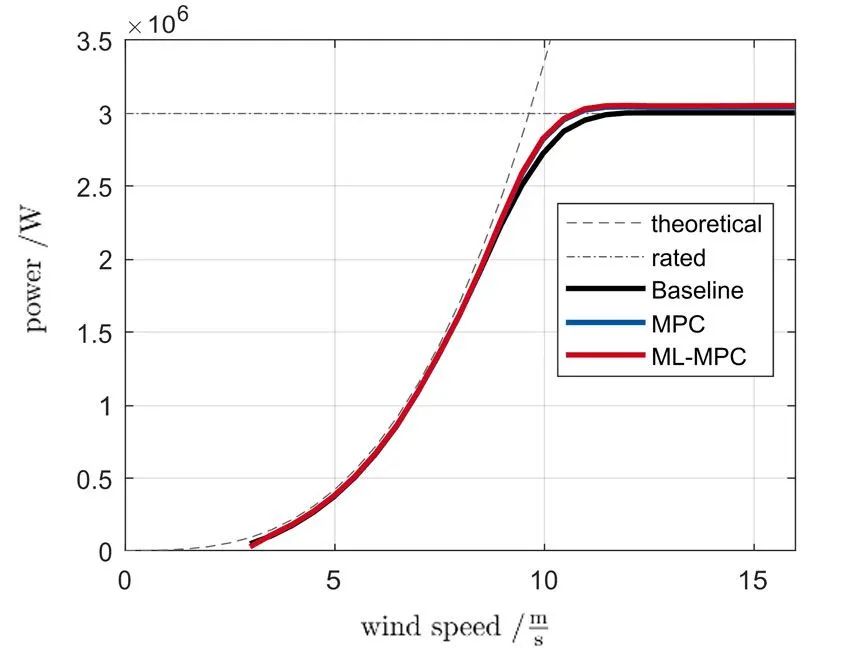
圖 5. 不同風速下的模擬功率輸出圖,顯示機器學習增強型 MPC(紅色)、無機器學習的 MPC(藍色)和基線控制(黑色)替代方案的輸出相似。
▼
在真實的風力發電機上部署和測試
雖然模擬讓我們對控制設計充滿信心,但了解它在真實 WT 上的表現以及評估其在真實操作條件下的穩健性對我們的研究項目也至關重要。為了實現這一目標,我們使用了 Simulink Coder Simulink 的 M-Target 從我們的控制器生成代碼,用于安裝在 W2E Wind to Energy WT 中的 BachmannElectronic GmbH 的 MH230 PLC。現場試驗進展順利,證實了全尺寸風力發電機組在部分負荷和滿負荷條件下的穩定運行(圖 6)。
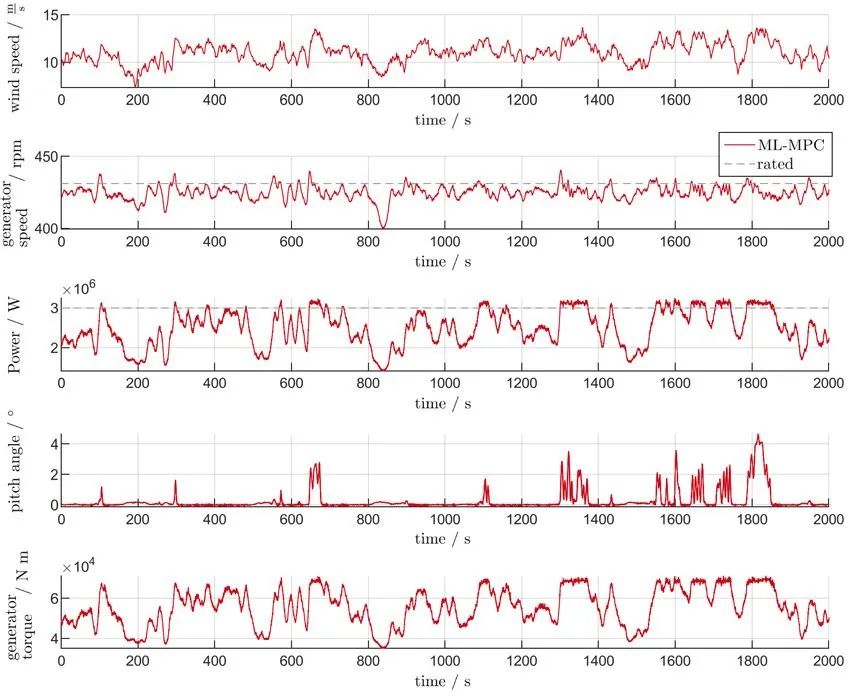
圖 6. 控制羅斯托克 3 MW 風力發電機的新機器學習增強型 MPC 的實驗現場測試結果。
因此,在這個第一個概念驗證中,我們展示了在全面 WT 上的高級 MPC 算法中使用機器學習擴展的普遍可能性。這將使我們能夠在未來的實驗中測試更復雜的機器學習算法,并進一步改善風力發電機的運行。
近期,我們期待對 WT 進行更廣泛的現場測試,并有機會進一步優化和調整控制器。我們還在探索其他幾種潛在的改進方法,包括使用激光雷達傳感器為控制器提供更準確的風傳播估計,以及使用單獨的葉片螺距控制(而不是集體葉片螺距控制)來進一步提高控制精度和性能。
-
matlab
+關注
關注
185文章
2974瀏覽量
230382 -
控制器
+關注
關注
112文章
16332瀏覽量
177806 -
風力發電機
+關注
關注
6文章
192瀏覽量
20900
原文標題:風能管理 | 利用 MATLAB 通過模型預測控制優化風力發電機的效率
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
無刷雙饋發電機的matlab仿真模型研究 相關資料分享
【源碼】風力發電機模型 精選資料分享
【源碼】風力發電機模型version 2.5.0.0 精選資料分享
基于MATLAB實現對風力發電機噪聲的倍頻程分析處理





 工商網監
工商網監
評論