") 環(huán)路補(bǔ)償原理及為什么要環(huán)路補(bǔ)償
環(huán)路補(bǔ)償原理及為什么要環(huán)路補(bǔ)償
1.概述
以前在電源公司時(shí),老的工程師經(jīng)常說電源動(dòng)態(tài)響應(yīng)不行調(diào)調(diào)loop gain,然后一臉懵,啥是loop gain(說的就是環(huán)路補(bǔ)償)?看到他們?cè)O(shè)計(jì)的電路當(dāng)時(shí)覺得好難好復(fù)雜,一直覺得電源設(shè)計(jì)最難的是環(huán)路設(shè)計(jì)和PCB設(shè)計(jì)。
既然這次趕鴨子上架,我就來好好總結(jié)下,后續(xù)也會(huì)對(duì)PCB布局布線進(jìn)行總結(jié),當(dāng)然完整設(shè)計(jì)的工程經(jīng)驗(yàn)少,不足的后續(xù)在成長中繼續(xù)補(bǔ)充。
2.什么是環(huán)路補(bǔ)償?
這涉及到自動(dòng)控制原理。首先說幾個(gè)概念。
開環(huán):指信號(hào)從輸入直接到輸出
閉環(huán):指信號(hào)從輸入到輸出后,又反饋到輸入。
傳遞函數(shù):輸出Vout/輸入Vin,后續(xù)簡稱傳函
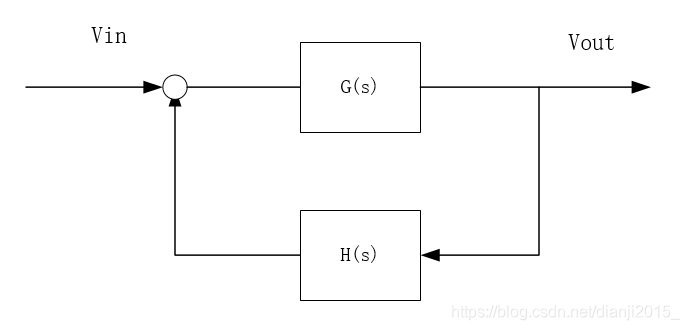
開環(huán)傳遞函數(shù):閉環(huán)系統(tǒng)中,開環(huán)傳遞函數(shù)是指,斷開反饋后,正向傳遞函數(shù)G(S)*反饋傳遞函數(shù)H(S)
閉環(huán)傳遞函數(shù):G(s)/(1+G(s)*H(s))
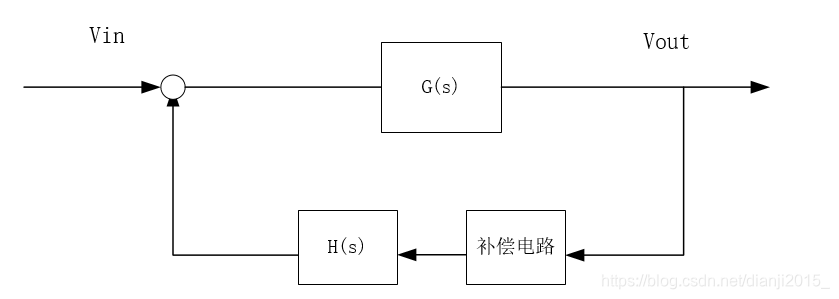
環(huán)路補(bǔ)償指的是,在閉環(huán)系統(tǒng)中,在反饋上加入一種電路,用來補(bǔ)償系統(tǒng)在擾動(dòng)時(shí)的性能不足,從而維持系統(tǒng)的穩(wěn)定或者較優(yōu)的狀態(tài)。補(bǔ)償電路一般是運(yùn)放和電阻電容組成的電路。
3.為什么要環(huán)路補(bǔ)償?
3.1環(huán)路補(bǔ)償原因
對(duì)于電源而言,引起輸出變化的兩個(gè)因素主要是,輸入和負(fù)載的變化。而這兩者的變化,有可能導(dǎo)致輸出不穩(wěn)定,例如輸出電壓震蕩劇烈或者在一定的時(shí)間內(nèi)無法回到額定輸出電壓,這對(duì)電源來說都是致命的危害,所以要進(jìn)行環(huán)路補(bǔ)償,使其面對(duì)外界干擾時(shí)可以無堅(jiān)不摧。
總結(jié)來說,進(jìn)行環(huán)路補(bǔ)償有以下兩個(gè)原因:
從穩(wěn)態(tài)考慮,希望輸入和負(fù)載變化時(shí),輸出能回到穩(wěn)定值
從動(dòng)態(tài)考慮,系統(tǒng)系統(tǒng)在受到干擾后,能快速回到穩(wěn)定值,并且超調(diào)值在可接受的范圍內(nèi)。
3.2環(huán)路穩(wěn)定依據(jù)
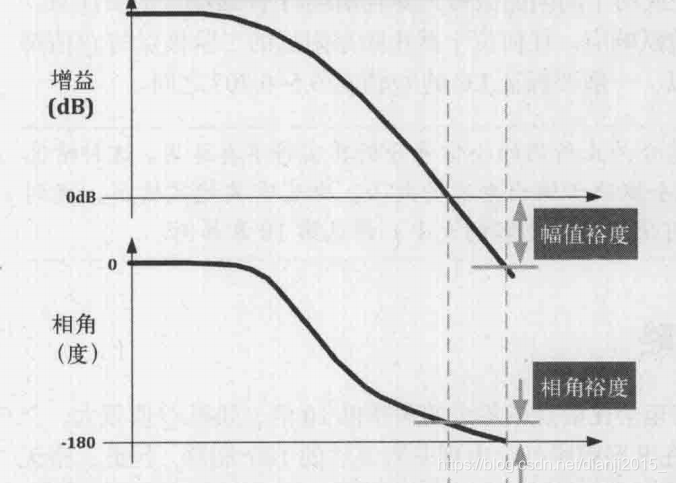
以上又涉及到下面幾個(gè)概念。相位裕量和幅值裕量主要表征的是穩(wěn)態(tài),帶寬主要表征的是動(dòng)態(tài)。
幅值裕量:當(dāng)相位為-180°時(shí),開環(huán)增益與0dB的差,一般電源要求《-10dB。
相位裕量:開環(huán)增益為1,即0dB時(shí),對(duì)應(yīng)的相位與-180°之差。考慮到元件容差以及溫度對(duì)系統(tǒng)影響,一般要求》45°,相位裕量過低會(huì)欠阻尼,過高,會(huì)過阻尼。
幅值裕量一般與相位裕量相對(duì)應(yīng),-10dB對(duì)應(yīng)60°。
這里想順便介紹下,為什么相位裕量越大,系統(tǒng)震蕩越小,反應(yīng)越慢?這涉及到阻尼的概念。
回到自動(dòng)控制原理。以二階系統(tǒng)為例說明。

阻尼有以下幾種情況
《0,單位階躍響應(yīng)不穩(wěn)定,即響應(yīng)發(fā)散
在(0,1)范圍內(nèi),有一對(duì)負(fù)實(shí)部共軛復(fù)根,單位階躍響應(yīng)系統(tǒng)震蕩
=1,臨界阻尼,單位階躍響應(yīng)無震蕩穩(wěn)態(tài)輸出
大于1, 過阻尼,單位階躍響應(yīng)響應(yīng)緩慢
二階系統(tǒng)的開環(huán)傳遞函數(shù)如下

從上式可以看出,相位裕量越大,阻尼越大,所以系統(tǒng)響應(yīng)越緩慢。
帶寬:幅頻特性下,0頻率和幅值下降3dB的頻率之間的寬度。帶寬越寬,跟蹤控制信號(hào)的能力越強(qiáng),表示反應(yīng)速度越快。
穿越頻率:開環(huán)增益曲線穿過0dB的頻率點(diǎn)。一般選擇為開關(guān)頻率的1/5-1/10.
那么問題來了?為何比較點(diǎn)是增益為0dB,相位為-180°?
我們來看閉環(huán)的傳函
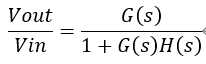
分母為0時(shí),傳函無窮大。在這種情況下,一個(gè)固定的輸入導(dǎo)致輸出無窮大,這對(duì)實(shí)際系統(tǒng)來說,太可怕,這種情況下,系統(tǒng)就是不穩(wěn)定的。分母為0要保證以下兩點(diǎn)
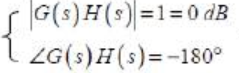
而進(jìn)行環(huán)路補(bǔ)償?shù)哪康模褪潜WC以上兩個(gè)條件永遠(yuǎn)不能滿足。
4.如何進(jìn)行環(huán)路補(bǔ)償?
4.1 補(bǔ)償器的特點(diǎn)
上一節(jié)說明了補(bǔ)償器的根本目的,就是保證開環(huán)傳函的分母永遠(yuǎn)不能為0,也就是說增益要盡可能的遠(yuǎn)離0dB,相角要盡可能的遠(yuǎn)離-180°。
補(bǔ)償器的目標(biāo):
穿越0dB時(shí),斜率為-1,這個(gè)可保證環(huán)路帶寬不至于過小。
抵消電容ESR帶來的影響
高頻要衰減的足夠快,用來抑制高頻噪聲
增益要足夠大,使得系統(tǒng)調(diào)節(jié)的快,且穩(wěn)態(tài)精度小
提高系統(tǒng)的階數(shù),消除穩(wěn)態(tài)誤差
所以一個(gè)成熟的開關(guān)電源補(bǔ)償器應(yīng)該包括以下幾點(diǎn):
一個(gè)為0的極點(diǎn),簡稱零極點(diǎn)。作用是相當(dāng)于加入積分器,可保證增益。
兩個(gè)零點(diǎn),位于LC雙極點(diǎn)的附近,用來抵消LC極點(diǎn)帶來的影響
一個(gè)極點(diǎn),位于電容ESR帶來的零點(diǎn)處,用于抵消ESR帶來的影響。因?yàn)殡娙軪SR帶來的影響不是固定的,會(huì)受外界因素的影響,所以需要抵消其影響。
一個(gè)高頻極點(diǎn),用來讓高頻信號(hào)衰減的更快。
什么時(shí)候抵消零點(diǎn),什么時(shí)候抵消極點(diǎn),抵消哪種零點(diǎn)和極點(diǎn),為什么要這樣抵消?
為了弄清楚以上問題,我們必須明白零極點(diǎn)對(duì)系統(tǒng)帶來哪些影響。
4.1.1 極點(diǎn)的影響
極點(diǎn):開環(huán)傳遞函數(shù)中,分母為0的點(diǎn)。
極點(diǎn)對(duì)傳函的影響如下:
每增加一個(gè)極點(diǎn),相位就減小-90°。我們平時(shí)見的低通濾波器就是單極點(diǎn)系統(tǒng)。
影響特征根,對(duì)應(yīng)運(yùn)動(dòng)模態(tài)
導(dǎo)致增益下降
4.1.2 零點(diǎn)的影響
零點(diǎn):開環(huán)傳遞函數(shù)中,分子為0的點(diǎn)。
極點(diǎn)對(duì)傳函的影響如下:
每增加一個(gè)極點(diǎn),相位就增加+90°。
影響運(yùn)動(dòng)模態(tài)對(duì)應(yīng)的比例
導(dǎo)致增益上升,系統(tǒng)響應(yīng)加快。
零極點(diǎn)的影響導(dǎo)致了在低頻時(shí)增益大,高頻時(shí)增益小,所以增益曲線呈下降趨勢(shì),可以看成一個(gè)低通濾波器,這也可以與穿越頻率決定環(huán)路響應(yīng)快慢對(duì)應(yīng)起來,因?yàn)榇┰筋l率越大,輸入信號(hào)通過的頻率越多,越能還原原本的波形,所以響應(yīng)快。
4.2 補(bǔ)償器的分類
補(bǔ)償器一般有三種:單極點(diǎn)補(bǔ)償,雙極點(diǎn)單零點(diǎn)補(bǔ)償,三極點(diǎn)雙零點(diǎn)補(bǔ)償。極點(diǎn)數(shù)總是多于零點(diǎn)數(shù),這樣可提高系統(tǒng)的階數(shù),保持穩(wěn)定。
1. 單極點(diǎn)補(bǔ)償(type I)
傳遞函數(shù)如下:
2. 雙極點(diǎn)單零點(diǎn)(type II)
適用于功率部分只有一個(gè)極點(diǎn)的補(bǔ)償。如:所有電流型控制和非連續(xù)方式電壓型控制。
3. 三極點(diǎn)雙零點(diǎn)(type III)
適用于輸出帶LC諧振的拓?fù)洌缢袥]有用電流型控制的電感電流連續(xù)方式拓?fù)洹?/p>

4.3 buck電路的環(huán)路設(shè)計(jì)
設(shè)計(jì)環(huán)路的基本步驟如下:
根據(jù)已知參數(shù)確定功率級(jí)傳函
確定穿越頻率(一般為開關(guān)頻率的1/10)
確定補(bǔ)償器的類型
計(jì)算電阻電容參數(shù)
下面對(duì)兩種控制型的buck電路環(huán)路進(jìn)行設(shè)計(jì)介紹。
4.3.1 電壓控制型
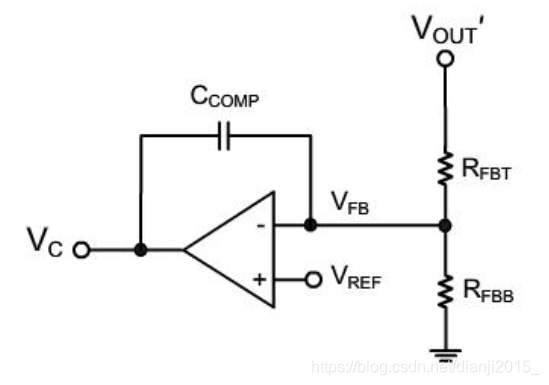
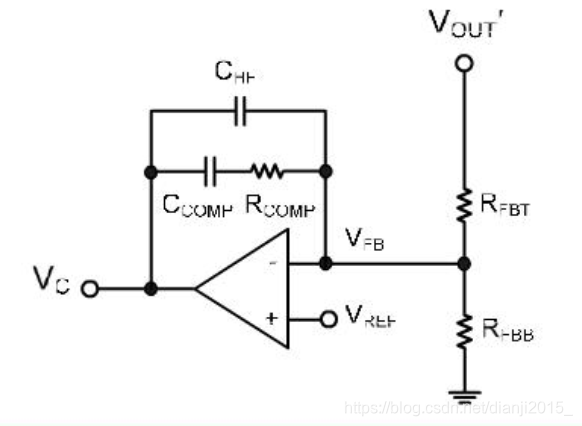
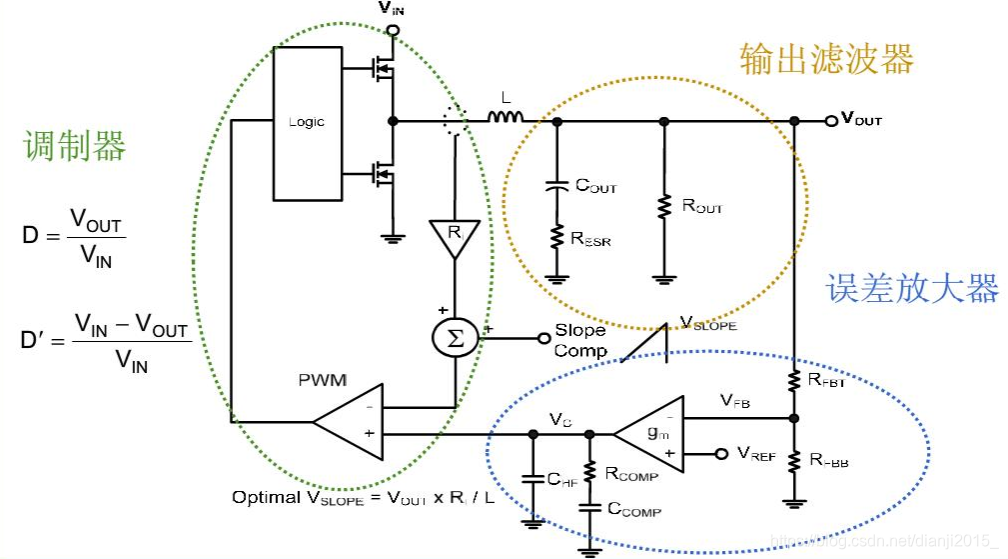
電壓控制型buck電路是指,用buck的輸出電壓作為反饋,進(jìn)行比較后產(chǎn)生PWM波。一般采用typeIII補(bǔ)償器進(jìn)行補(bǔ)償。
下面是電壓型buck電路的原理框圖,包括pwm產(chǎn)生電路,主功率電路,輸出濾波,誤差放大器。
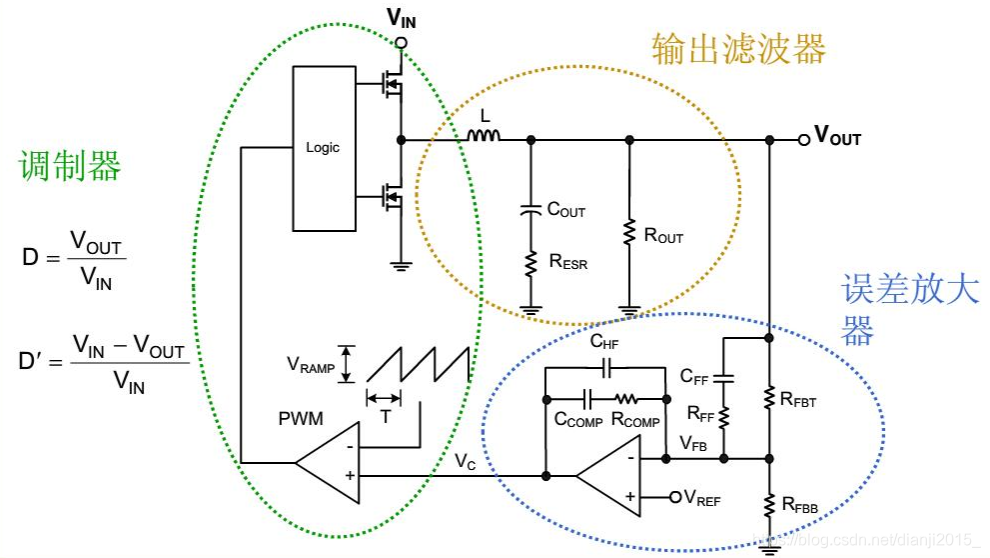
PWM產(chǎn)生電路的傳遞函數(shù)為Gpwm=D/Vcomp:
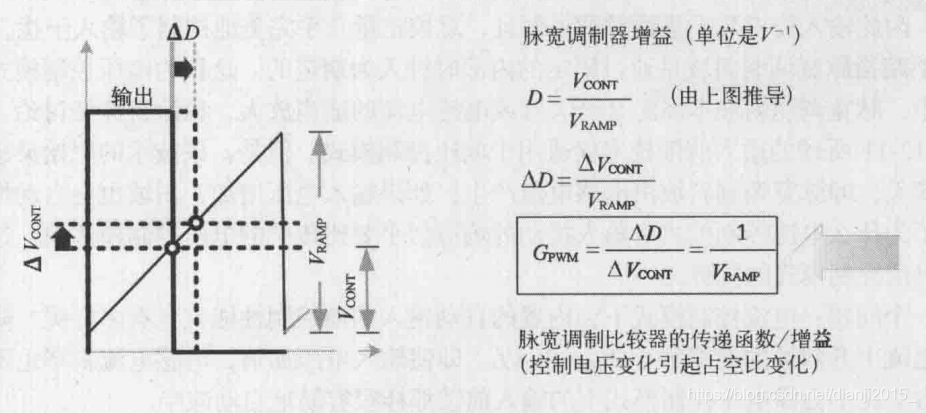
Vram是三角波的峰峰值。
主功率電路的傳函為:Vo/D=Vin
LC濾波電路(加上電容的ESR)的傳函為:
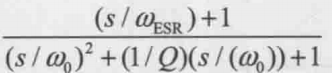
電容的ESR帶來的零點(diǎn)頻率為Wesr=1/(ESR*C)
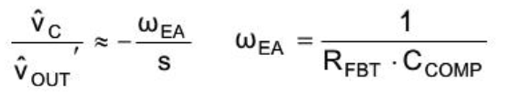
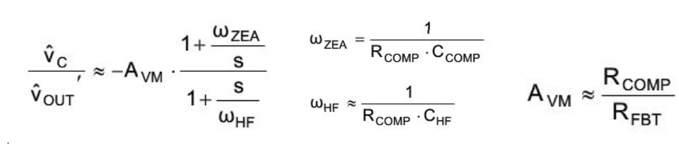
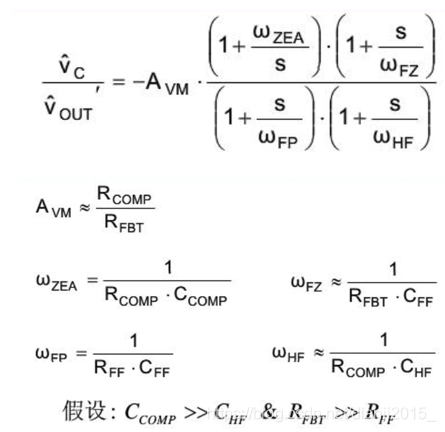
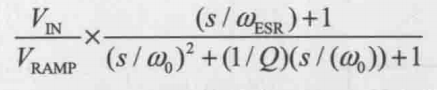
所以從誤差放大器出來到Vo的傳函為:
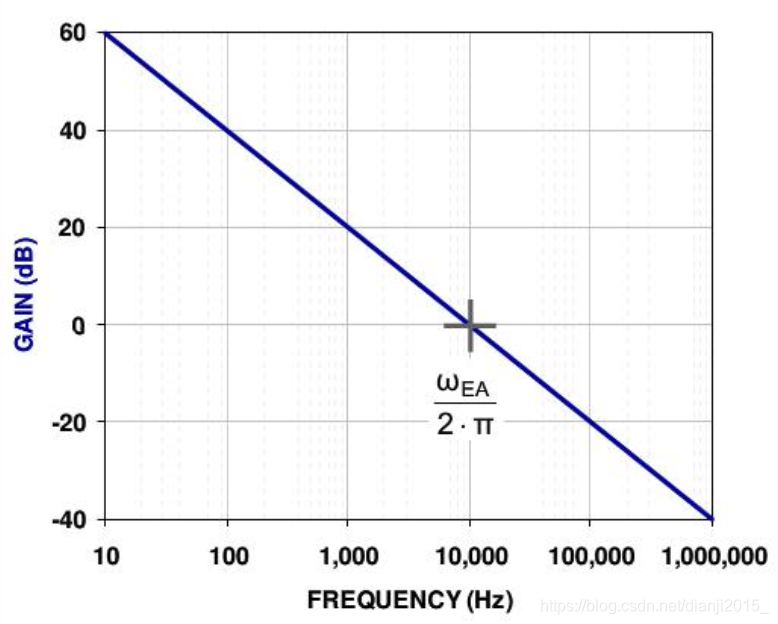
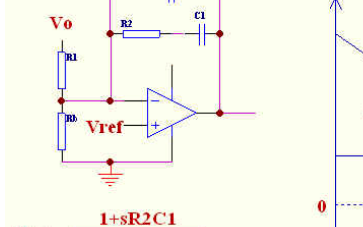
下面進(jìn)入誤差放大器的設(shè)計(jì)。
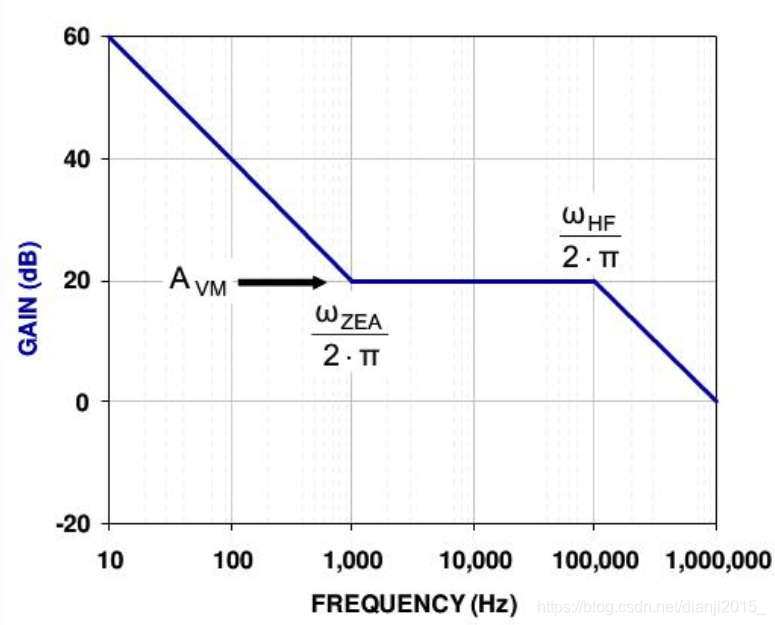
1)求出原傳函的零極點(diǎn)
2)確定穿越頻率為開關(guān)頻率的1/10
3)讓補(bǔ)償器的零點(diǎn)等于傳函的LC極點(diǎn),選擇合適的電阻電容
4)讓補(bǔ)償器的某一極點(diǎn)等于電容esr帶來的零點(diǎn),確定電阻電容
5)高頻極點(diǎn)為穿越頻率,確定電阻電容
6)重新求相位裕量以及幅值裕量
4.3.2 電流控制型
電流型buck電路是指,不僅采用電壓作為電壓負(fù)反饋,而且還要電感電流(一般是峰值電流)作為電流反饋,由于是電感電流,所以少了一個(gè)L帶來的極點(diǎn),一般采用typeII型補(bǔ)償器進(jìn)行補(bǔ)償。
PWM產(chǎn)生電路的傳遞函數(shù):Vc/iL=Rs,Rs為mos電流的采樣電阻
主功率回路+濾波電路傳函:
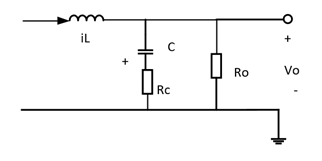
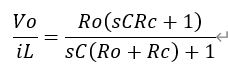
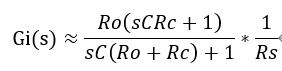
所以從電壓誤差放大器出來的傳函為
接下來的誤差放大器的設(shè)計(jì)步驟,與上一節(jié)電壓控制型誤差放大器設(shè)計(jì)步驟一致。
電流型buck的優(yōu)點(diǎn)是補(bǔ)償電路簡單,響應(yīng)快,但是缺點(diǎn)是容易出現(xiàn)次諧波震蕩,需要加入斜坡補(bǔ)償。
下面介紹次諧波震蕩和斜坡補(bǔ)償。
(1)次諧波震蕩
次諧波震蕩:一般出現(xiàn)在電流控制模式下,電流連續(xù)且占空比大于50%,出現(xiàn)1/2的頻率。
產(chǎn)生原因:占空比大于50%后,電流上升時(shí)間大于下降時(shí)間,使得還未下降到初始值就進(jìn)入電流上升期,由于到達(dá)峰值電流時(shí)間短,所以占空比縮小,這樣看起來出現(xiàn)大小波的情況,也就是次諧波。若出現(xiàn)擾動(dòng),系統(tǒng)會(huì)不穩(wěn)定。
這樣看來,重載比輕載容易出現(xiàn)次諧波振蕩,因?yàn)橥瑯虞斎霔l件下,重載要的占空比大。

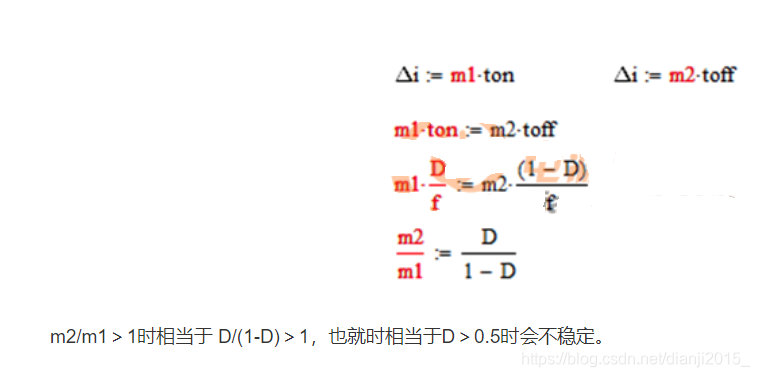
要求電流上升斜率大于下降斜率,否則會(huì)不穩(wěn)定,推論如下,m1是電感電流的上升斜率,m2是電流的下降斜率
(2) 斜坡補(bǔ)償
在電流上疊加一個(gè)負(fù)的固定斜坡的電流,減少電流環(huán)在1/2諧波的增益。實(shí)質(zhì)是使得電流控制模式看起來更像電壓控制模式,因?yàn)殡妷嚎刂颇J骄褪遣捎霉潭ㄐ逼碌匿忼X波。
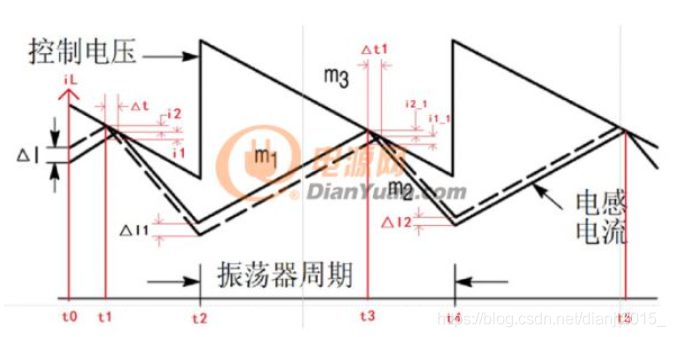
如上圖所示,在控制電壓上,疊加一個(gè)下降斜率為m3的斜坡,這會(huì)使得電流上升時(shí)間縮短,下降時(shí)間延長,只要保證m3》m2/2系統(tǒng)就能穩(wěn)定。為了方便,在buck電路中,選擇m3=m2=Vo/L
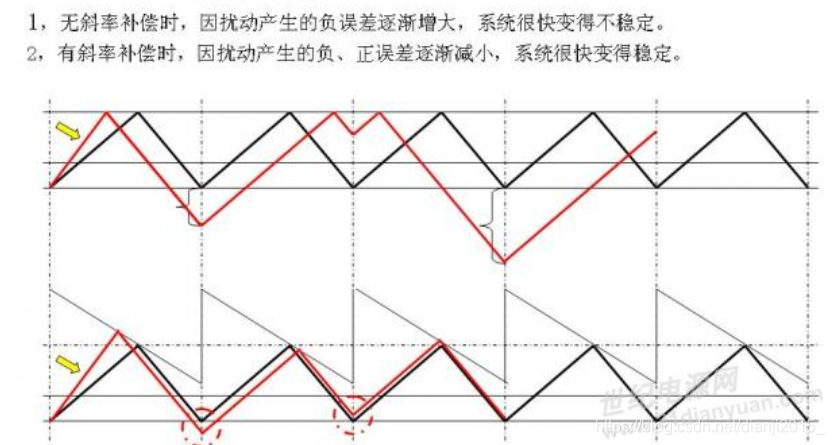
斜坡補(bǔ)償后,偏差會(huì)越來越小。
-
傳遞函數(shù)
+關(guān)注
關(guān)注
0文章
102瀏覽量
13944 -
補(bǔ)償器
+關(guān)注
關(guān)注
0文章
86瀏覽量
14110 -
環(huán)路補(bǔ)償
+關(guān)注
關(guān)注
2文章
41瀏覽量
6170
原文標(biāo)題:環(huán)路補(bǔ)償介紹
文章出處:【微信號(hào):mcu168,微信公眾號(hào):硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
開關(guān)電源環(huán)路補(bǔ)償講解之開關(guān)電源反饋環(huán)路如何調(diào)試設(shè)計(jì)分析集合分享
開關(guān)電源環(huán)路補(bǔ)償設(shè)計(jì)
LTC4020的環(huán)路補(bǔ)償如何設(shè)置?
學(xué)會(huì)理解環(huán)路以及怎么去做環(huán)路補(bǔ)償,你還差這一步!
什么是環(huán)路補(bǔ)償?環(huán)路穩(wěn)定的標(biāo)準(zhǔn)是什么?
環(huán)路計(jì)算補(bǔ)償和仿真教材

BUCK電路的環(huán)路計(jì)算補(bǔ)償仿真

DCDC環(huán)路補(bǔ)償小結(jié)

開關(guān)電源環(huán)路補(bǔ)償.





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論