 MEMS加速度計的工作原理是什么
MEMS加速度計的工作原理是什么
MEMS加速度計的工作原理主要基于牛頓第二定律,即力等于質量乘以加速度。以下是對其工作原理的介紹:
一、核心部件與結構
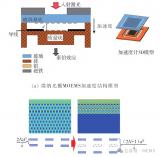
MEMS加速度計的核心部件包括一個微小的質量塊、彈性元件(如彈簧梁)以及檢測器(如電容或應變片)。這些部件通常被集成在一塊微小的硅片上,形成一個緊湊且高效的加速度傳感器。
二、工作原理
- 質量塊與彈性元件 :
- 質量塊通常是一個小型的重物,如金屬球或陶瓷片,它被安裝在彈性元件(如彈簧梁)的一端。當加速度作用于質量塊時,彈性元件會發生彎曲或形變。
- 位移與電容變化 :
- 這種彎曲或形變會導致質量塊的位置發生變化,從而改變其與檢測器之間的相對位置。如果檢測器是一個電容,那么質量塊的位移會導致電容的極板間距或極板面積發生變化,進而引起電容值的變化。
- 電信號轉換 :
- 通過測量電容值的變化,可以將其轉換為電信號。這個電信號與加速度的大小和方向成正比,因此可以用來表示加速度的值。
- 信號處理 :
三、工作原理的總結
綜上所述,MEMS加速度計的工作原理可以概括為:利用微小的質量塊在加速度作用下的位移,通過彈性元件的形變和檢測器的電容變化,將加速度轉換為電信號進行測量。這種轉換過程具有高精度、高響應速度以及低功耗等優點,使得MEMS加速度計在智能手機、汽車電子系統、航空航天等領域得到了廣泛的應用。
此外,還有一些特殊的MEMS加速度計,如壓阻式加速度傳感器,它們的工作原理略有不同。壓阻式加速度傳感器利用半導體材料在受到外力作用時產生的微小應變來改變其電阻值,從而實現對加速度的測量。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電容
+關注
關注
100文章
6036瀏覽量
150263 -
檢測器
+關注
關注
1文章
863瀏覽量
47676 -
mems
+關注
關注
129文章
3924瀏覽量
190581 -
加速度計
+關注
關注
6文章
700瀏覽量
45891
發布評論請先 登錄
相關推薦
PCB Piezotronics推出357A67型三軸電荷輸出加速度計
據麥姆斯咨詢報道,近期,PCB Piezotronics推出了357A67型三軸電荷輸出加速度計,以滿足高溫應用需求。這款新型號是PCB Piezotronics目前最小的三軸電荷輸出加速度計,可

EPSON工業級加速度計選型
愛普生加速度計(Accelerometers)是一種工業級三軸輸出壓電式加速度傳感器,采用具有專利技術的雙音叉式石英傳感器元件和Quarts光刻技術,通過壓電效應來計算出諸如此類的內容物體運動的方向

三軸加速度計LIS2DUX12開發(2)----靜態校準
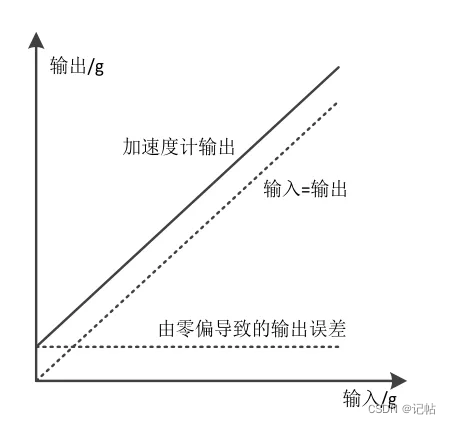
零偏是影響加速度計輸出精度的重要指標之一,零偏可分為靜態零偏和動態零偏 。靜態零偏也稱為固定零偏,通常經標定與補償減小靜態零偏。動態零偏是由于加速度計自身的缺陷或環境因素(如溫度、振動、電子干擾等
三軸加速度計LIS2DW12開發(4)----測量傾斜度
本文將介紹如何驅動和利用LIS2DW12三軸加速度計的傾斜檢測理論和傾斜角測量方法。一般來說,這里描述的程序也可以應用于三軸模擬或數字加速度計,這取決于它們各自的規格。
備受青睞的MEMS加速度計,更小尺寸、更低功耗、更智能
電子發燒友網報道(文/李寧遠)作為導航測量系列的基礎元器件之一,加速度計是測量運載體加速度的器件。它被廣泛應用于消費電子、工業自動化、汽車、航空航天等各個領域,能夠為單一設備或者整個系統收集狀態信息


一種聚合物壓電MEMS加速度計新設計方案
MEMS加速度計通過微結構內發生的電容、電阻或電荷(壓電)變化來檢測機械加速度,現已成為僅次于壓力傳感器,應用量排名第二的MEMS器件。
發表于 12-29 11:14
?496次閱讀

ADXL1001加速度計沒有輸出的原因?
RT9058轉換為5V為加速度計供電。
現有3種猜測:
1、由于我們是手工焊的ADXL1001,懷疑芯片沒有焊好
2、RT9058輸出電壓為5V~5.2V,懷疑比較接近ADXL1001的輸入電壓上限5.25V導致傳感器不工作
3、傳感器故障
現向大神請教,敬盼回
發表于 12-29 07:05
兩軸加速度計和三軸加速度計的使用區別?
有個問題請教一下:在靜態測量的情況下,兩軸的加速度計在測得X、Y軸上的加速度后,是不是就可以根據這兩個值和重力加速度g算出Z軸方向的加速度,這樣的話XYZ三個方向的角度也可以推導出來。
發表于 12-29 06:06
采集到的ADIS16477-2的imu數據,測試陀螺、加速度計的漂移非常大怎么解決?
我現在采集到的ADIS16477-2的imu數據,測試陀螺、加速度計的漂移非常大,IMU是放在臺面上鏡子不動的。
下圖第一排陀螺x、y、z的原始數據,第二排分別是5s鐘平滑后的數據。
下圖第一排
發表于 12-28 07:25





 工商網監
工商網監
評論