 深入解析自動駕駛系統中的DCU、MCU、MPU、SoC及整車電子架構
深入解析自動駕駛系統中的DCU、MCU、MPU、SoC及整車電子架構
摘要
本文探討了自動駕駛中的DCU、MCU和MPU在電子電氣架構中的作用,比較了分布式與集中式架構的優勢,以及ADAS系統從L0-L2+的發展歷程。著重分析了MCU和MPU的區別,以及它們在汽車智能化和網聯化趨勢下的關鍵角色。
自動駕駛中的DCU、MCU、MPU
1.分布式電子電氣架構
2.域集中電子電氣架構架構
2.1通用硬件定義
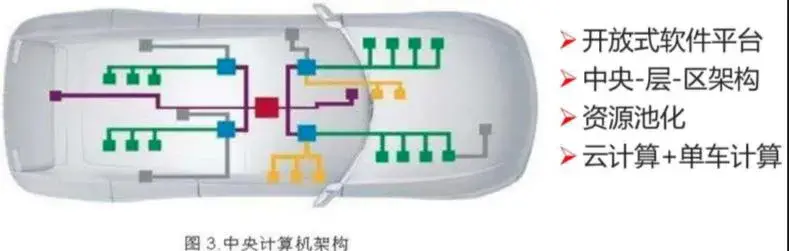
3.車輛集中電子電氣架構
4.ADAS/AD系統方案演變進程梳理
4.1L0-L2級別的ADAS方案
4.2L2+以上級別的ADAS方案
5.MCU和MPU區別
5.1MCU和MPU的區別
5.2CPU與SoC的區別
5.3舉個例子Reference:
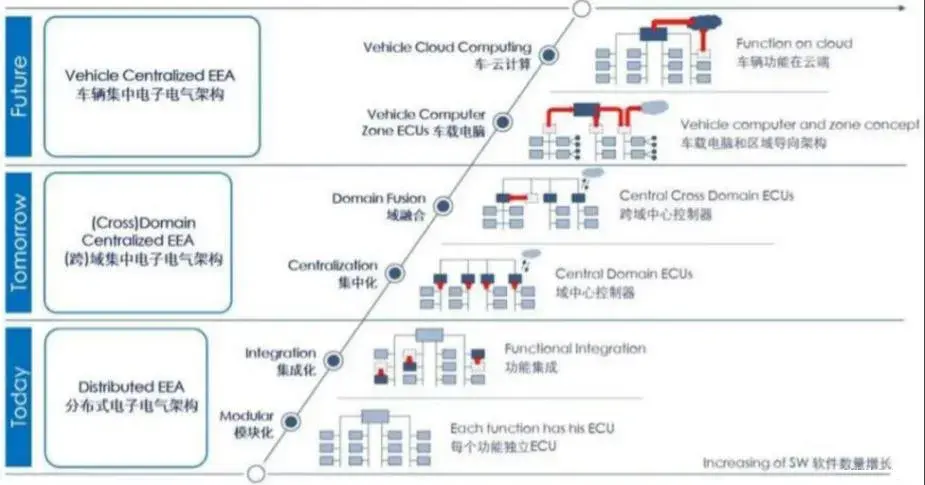
什么是域控制器(DCU),對汽車未來電子架構有什么影響?自動駕駛域控制器MPU和MCU的區別DCU:Domain Controller Unit,域控制器MCU:Micro Controller Unit,微控制單元MPU:Micro Processor Unit,微處理單元近年來,SDV(Software Define Vehicles,即軟件定義汽車)概念逐步被整車廠認知,根源在于“汽車如何體現差異化”問題的變遷,隨著電動化帶來的汽車電子構架革新,汽車硬件體系將逐漸趨于一致,如何構建通用化硬件,成為實現軟件軟件定義汽車的前提基礎。只有把硬件通用化,差異化減少,才能減少對軟件適配的成本,做到真正的軟件定義汽車。下圖為博世2017年在一汽車會議上分享的其在整車電子電氣架構方面戰略圖。整車電子電氣架構發展分為了六個階段:模塊化階段->功能集成階段->中央域控制器階段->跨域融合階段->車載中央電腦和區域控制器->車載云計算階段。
1.分布式電子電氣架構
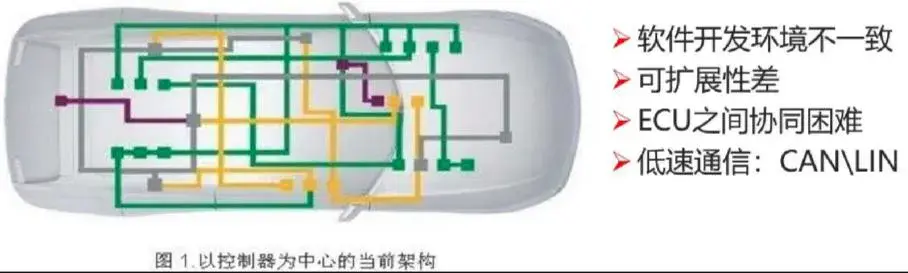
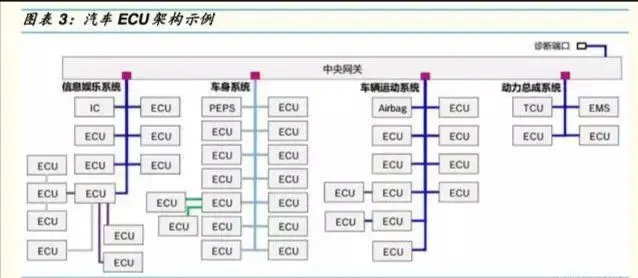
過去十多年的汽車智能化和信息化發展產生了一個顯著結果就是ECU芯片使用量越來越多。從傳統的引擎控制系統、安全氣囊、防抱死系統、電動助力轉向、車身電子穩定系統;再到智能儀表、娛樂影音系統、輔助駕駛系統;還有電動汽車上的電驅控制、電池管理系統、車載充電系統,以及蓬勃發展的車載網關、T-BOX和自動駕駛系統等等。傳統的汽車電子電氣架構都是分布式的,汽車里的各個ECU都是通過CAN和LIN總線連接在一起,現代汽車里的ECU總數已經迅速增加到了幾十個甚至上百個之多,整個系統復雜度越來越大,幾近上限。在今天軟件定義汽車和汽車智能化、網聯化的發展趨勢下,這種基于ECU的分布式EEA也日益暴露諸多問題和挑戰。
2.域集中電子電氣架構
為了解決分布式EEA的這些問題,人們開始逐漸把很多功能相似、分離的ECU功能集成整合到一個比ECU性能更強的處理器硬件平臺上,這就是汽車 域控制器。域控制器的出現是汽車EE架構從ECU分布式EE架構演進到域集中式EE架構的一個重要標志。
為了解決分布式EEA的這些問題,人們開始逐漸把很多功能相似、分離的ECU功能集成整合到一個比ECU性能更強的處理器硬件平臺上,這就是汽車 域控制器。域控制器的出現是汽車EE架構從ECU分布式EE架構演進到域集中式EE架構的一個重要標志。
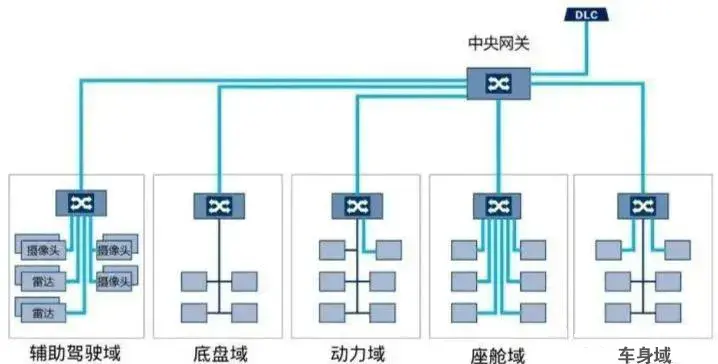
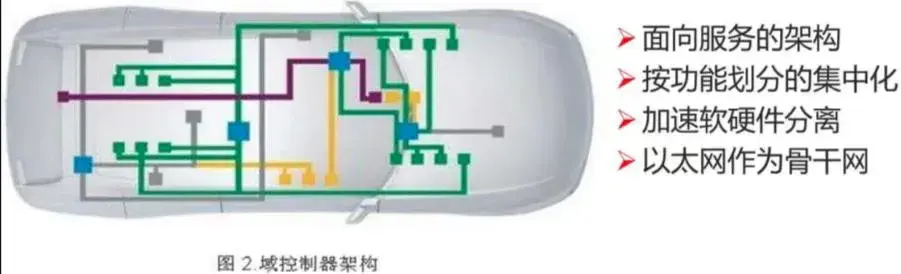
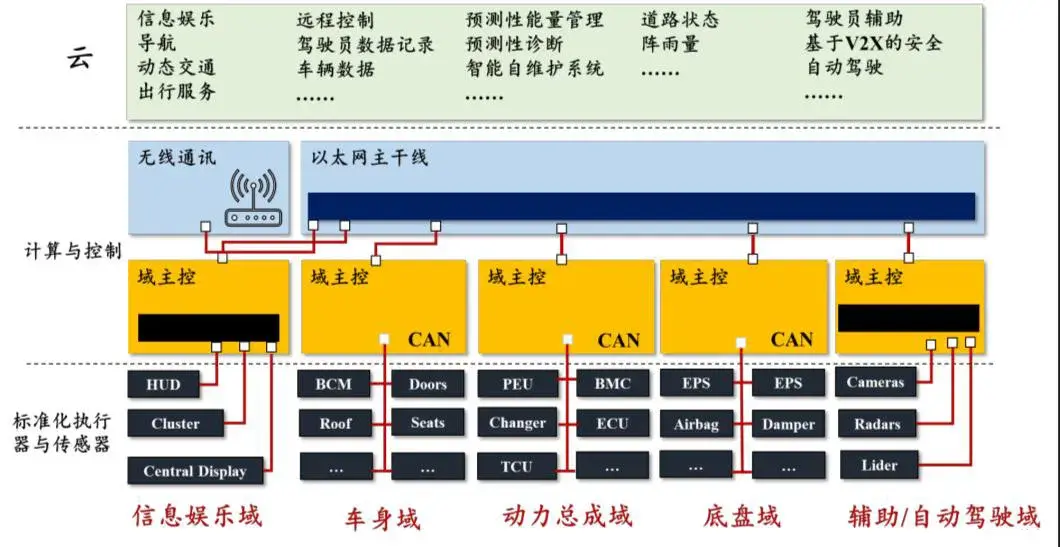
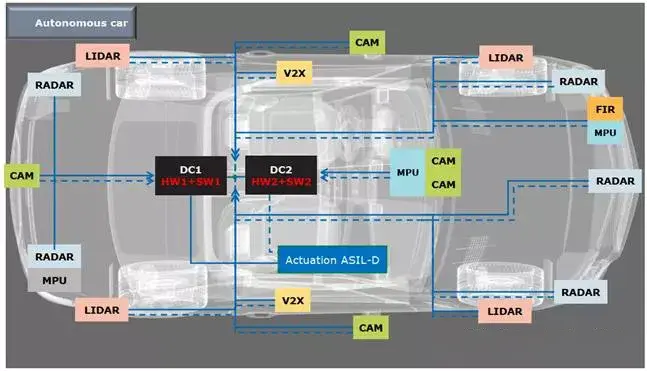
域控制器是汽車每一個功能域的核心,它主要由域主控處理器、操作系統和應用軟件及算法三部分組成。平臺化、高集成度、高性能和良好的兼容性是域控制器的主要核心設計思想。依托高性能的域主控處理器、豐富的硬件接口資源以及強大的軟件功能特性,域控制器能將原本需要很多顆ECU實現的核心功能集成到一起來,極大提高系統功能集成度,再加上數據交互的標準化接口,因此能極大降低這部分的開發和制造成本。對于功能域的具體劃分,各汽車主機廠家會根據自身的設計理念差異而劃分成幾個不同的域。比如博世劃分為5個域:動力域(Power Train,安全)、底盤域(Chassis,車輛運動)、車身域(Body,車身電子)、座艙域/智能信息域(Cockpit/Infotainment,娛樂信息)、自動駕駛域(ADAS,輔助駕駛)。
各個域內部的系統互聯使用現如今常用的CAN和 FlexRay通信總線。而不同域之間的通訊,則由更高傳輸性能的以太網作為主干網絡承擔信息交換任務。在每個功能域中,域控制器處于絕對位置,需要強大的處理功率和超高的實時性能以及大量的通信外設來支持對應域的功能實現。域控制器為構建新一代的通用、高算力、高帶寬、高安全、可重構的汽車電子電氣架構,智能電動汽車的技術和產業發展提供堅實基礎。2.1通用硬件定義域控制器的通用型要求:相關功能集中,集成MPU/MCU,滿足域內功能運算能力要求及功能安全要求;集成標準化軟件接口,如AUTOSAR;帶通訊接口,可與整車主網絡直連,同時與域內執行器或傳感器通過二級通訊總線進行交互,總線類型:車載以太網(TSN)、CAN、LIN、FlexRay…目前,主流車企、零部件企業產品均按照動力、底盤、車身、座艙、自動駕駛五大域控制器推進研發和商業化落地。
各分開域控制器介紹可見文章:什么是域控制器(DCU),對汽車未來電子架構有什么影響?
3.車輛集中電子電氣架構
4.ADAS/AD系統方案演變進程梳理
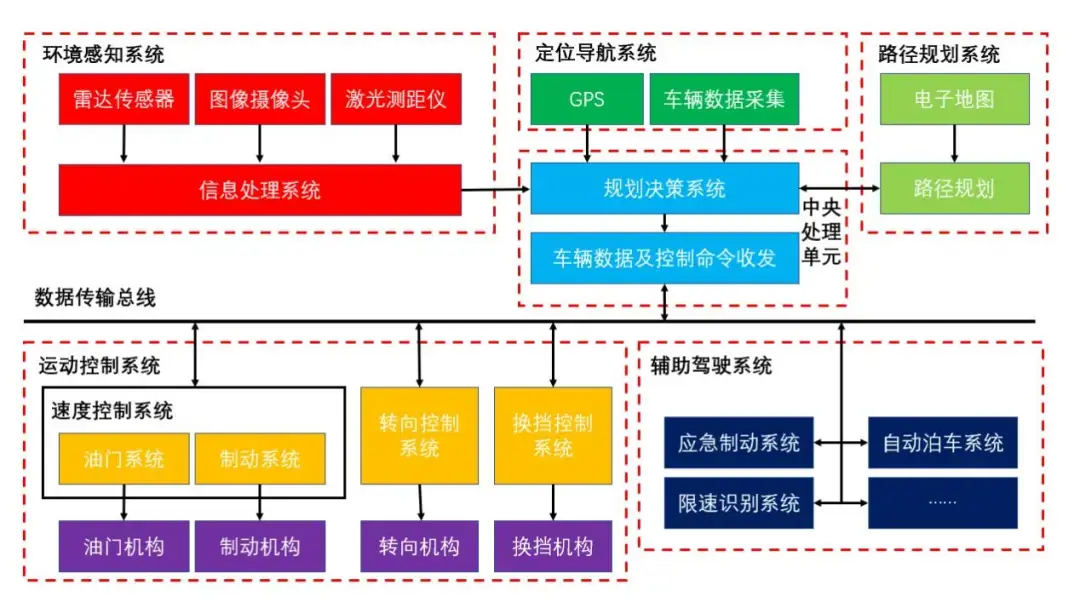
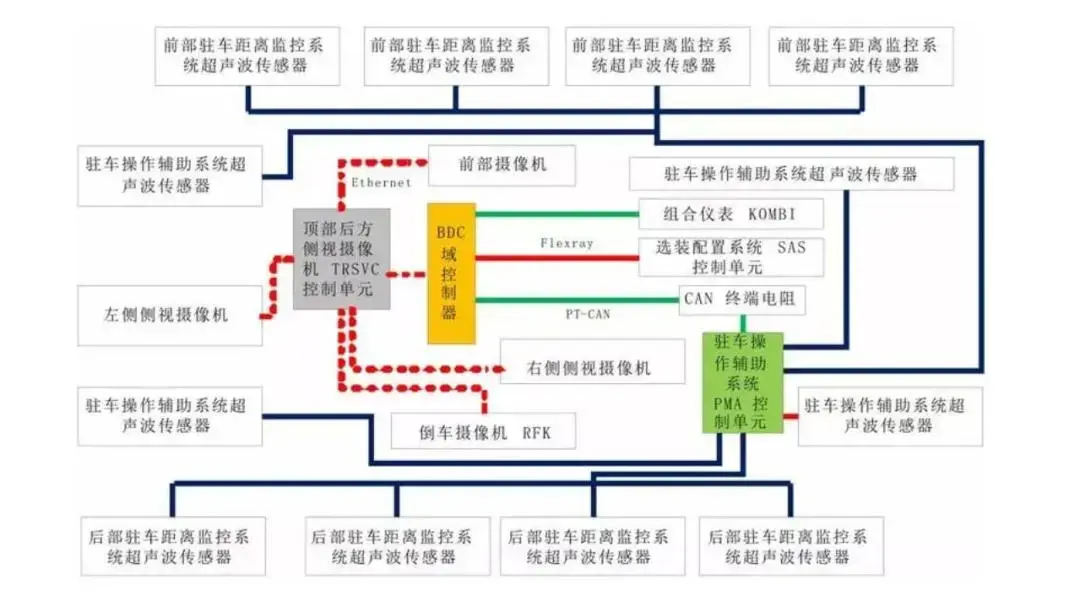
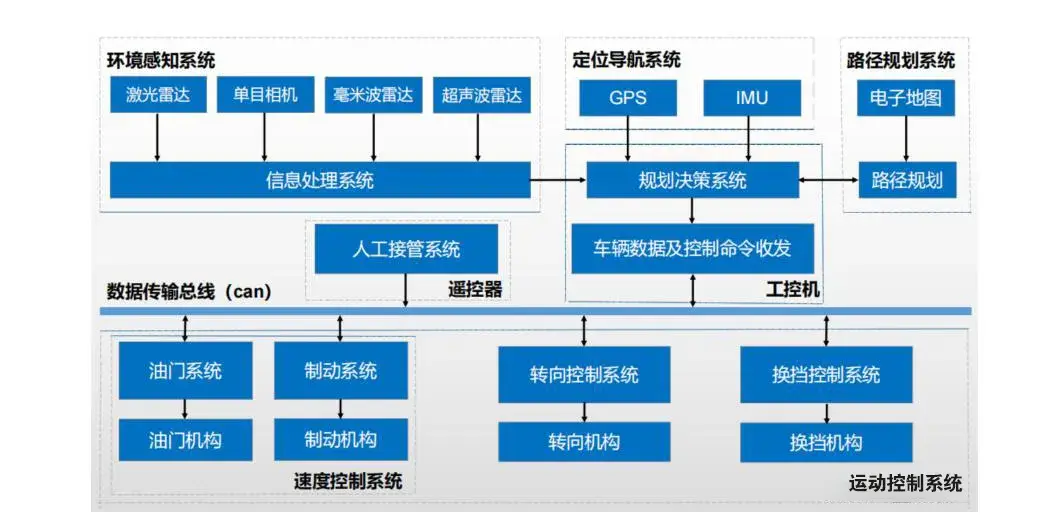
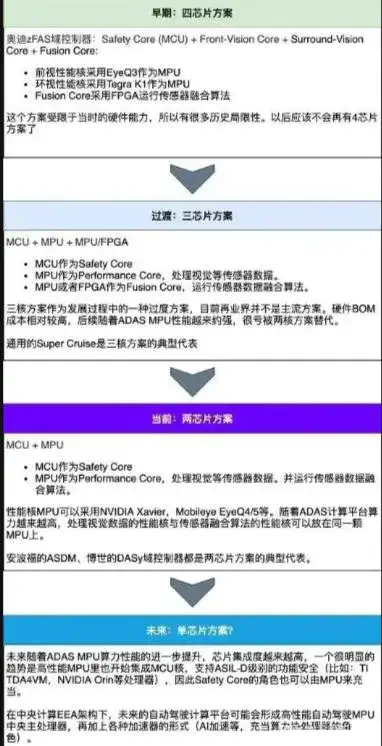
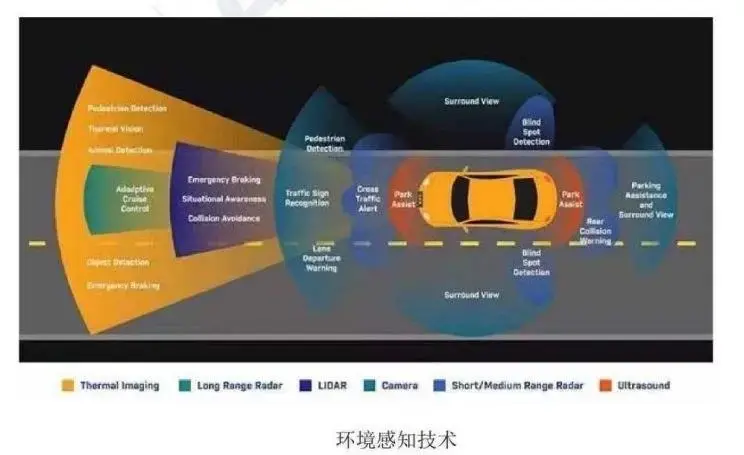
4.1L0-L2級別的ADAS方案早期大多數L0-L2級別的ADAS系統都是基于分布式控制器架構,整個ADAS系統由4-5個ADAS子系統組成,每個子系統通常是個一體機整體方案(可以被看作是一個smart sensor),子系統獨占所配置的傳感器,通常相互之間是獨立的。以智能前視攝像頭模塊(Intelligent Front Camera Module,FCM)為例,整個子系統ECU主板上包含2顆芯片:一顆是安全核(Safety Core);另一個顆是性能核(Performance Core)。安全核一般由英飛凌TC297/397之類的MCU充當,承載控制任務,因此需要較高的功能安全等級需求;性能核通常是具有更高性能算力的多核異構MPU,會承載大量的計算任務。下面是一個對L0-L2級別方案的總結:L0級別方案:實現各種ADAS報警功能,比如:FCW、LDW、BSW、LCA等。分布式架構,通常由FCM、FCR、SRRs、AVS、APA等幾大硬件模塊組成。L1級別方案:完成各種ADAS單縱向核單橫向控制功能,比如:ACC、AEB、LKA等。也是分布式架構,硬件模塊組成與L0級別方案大致相同。L2級別方案:完成ADAS縱向+橫向組合控制功能。比如:基于FCM+FCR融合系統,融合前向視覺感知和前雷達目標感知信息,實現TJA/ICA等功能;或者基于AVS+APA的融合系統,實現自動泊車功能。4.2L2+以上級別的ADAS方案分布式架構的ADAS系統存在兩個致命缺點:各個子系統互相獨立,無法做多傳感器之間的深度融合。各子系統獨占所配置的傳感器,因此無法實現跨多個不同子系統傳感器的復雜功能。當整車EE架構演進到域集中式EEA之后,ADAS域控制器中配置了集成度更高、算力性能更高的計算處理器平臺,進而可以支撐更復雜的傳感器數據融合算法,以實現更高級級別的ADAS功能,比如:HWP、AVP等。
集中式ADAS域控制器方案從最早的四芯片方案,過渡到三芯片方案,再到當前業界主流的兩芯片方案,如下圖所示:
5.MCU和MPU區別
MPU的全稱叫Micro Processor Unit,MCU的全稱是 Mirco Controller Unit。首先這兩個詞都有一個Micro開頭,其實這就表明了這是計算/控制單元小型化后出現的技術。事實上,這是由于集成電路進步帶來的計算機系統集成程度提高的結果。使得原來有多片分立的元件組成的計算機系統向高度集成化發展,多個芯片/元件的功能在向一顆芯片集中。這是一個大的技術演進的背景。核心區別其實就是Control和Process。但在技術演進過程中,出現了兩種不同的需求。這兩種需求就是“以軟制硬”和“以硬助軟”兩種模式。所謂以軟制硬,就是通過運行一段軟件/程序來控制硬件,也就是所謂的程控。在這種使用模式中,計算機系統不承擔主要的工作負載,而主要是起輔助/協調/控制作用。
因此這種情況下集成的化的計算機系統就不太需要強大的計算/處理能力。所以對應的形態應該是運行頻率低、運算能力一般,但是需要集成化程度高(使用方便)、價格低廉(輔助系統不應增加太多成本)等因素。由于主要完成“控制”相關的任務,所以被稱為Controller。也就是根據外界的信號(刺激),產生一些響應,做一點簡單的人機界面。對于這種需求,通過不需要芯片主頻太高。早期8051系列主頻不過10幾MHz,還是12個周期執行一條指令。經過多年的“魔改”也最終達到了100MHz。其次就是處理能力不用太強,8位的MCU長期是微控制器的主流。后來16位的MCU逐步開始占領市場。而隨著ARM的32位MCU的出現,采用ARM的M系列的MCU也開始逐步擴大市場。以ST、NXP公司的產品為主要代表。但是這些ARM系列MCU的主頻一般也是在幾十MHz到100多MHz的量級。其次由于執行的“控制相關”任務,通常不需要支持復雜的圖形界面和處理能力。在MCU上完成的任務大多數是一些簡單的刺激-響應式的任務,而且任務類型單一,任務執行過程簡單。在這種情況下一般不需要MCU去執行功能復雜、運算量大的程序,而通常不需要運行大型操作系統來支持復雜的多任務管理。這就造成了MCU一般對于存儲器的容量要求比較低。
而Processor,顧名思義是處理器。處理器就是能夠執行“處理”功能的器件。其實具備Processor這個單詞的器件不少。比如CPU就被稱為“中央處理器”,那既然有“中央”就應該有“外圍”。GPU在經典的桌面計算機中就是一個典型的“外圍”處理器,主要負責圖形圖像處理,由于圖形圖像顯示。當然,今天由于AI的崛起,GPU變身成為了人工智能的訓練神器。帶“P”的還有DSP,數字信號處理器,一種專門為了數字信號處理而生的“領域專用處理器”。所以這些帶P的處理器,都是要具備“處理”能力的。“處理”什么?自然是處理數據/信息了。也就是說處理器本身都需要較為強大的數據處理/計算能力。以GPU為例,正是由于它強大的并行浮點運算能力才能支持高速的圖像處理,使音視頻播放、多媒體技術成為可能。同樣由于這樣的處理能力使之在AI時代來臨之時發揮巨大作用。以上對于處理器說了這么多,核心意思就是一個。處理器一定要處理/運算能力強,能夠執行比較復雜的任務。而微處理器,其實就是微型化/集成化了的處理器。準確的說是微型化/集成化的中央處理器(CPU)。這就是把傳統的CPU之外集成了原屬于“芯片組”的各類接口和部分“外設”而形成的。MPU從一開始就定位了具有相當的處理和運算能力,一幫需要運行較大型的操作系統來實現復雜的任務處理。因此這就決定了MPU應該具備比較高的主頻,和較為強大的運算能力。MPU很早就演進到了32位處理器,現在更是開始大力普及64位。現在MPU領導具有絕對影響力的Arm公司一開始就定位要做32位。同時MPU也一直追求實現較高的主頻。早期經典的Arm9系列MPU頻率就在200MHz-400MHz。現在手機上使用的高端MPU更是到達了3GHz,和主流的桌面處理器是一個級別了。和通用的桌面處理器一樣,MPU現在也普遍“多核化”。
為了支撐MPU強大的算力,使得“物盡其用”。必然要求在MPU上運行比較復雜的、運算量大的程序和任務,通常需要有大容量的存儲器來配合支撐。而大容量的存儲器難以被集成到以邏輯功能為主的MPU內部,因此MPU現在要運行起來通常需要“外掛”大容量的存儲器。主要是大容量的DDR存儲器和FLASH。在手機領域前者被稱為“運存”而后者被稱為“內存”。為了支撐運行復雜操作系統和大型程序,往往還需要MPU中集成高性能的存儲控制器、存儲管理單元(MMU))等一整套復雜的存儲機制和硬件。
所以從形態上看,MPU由于需要運行對處理能力要求復雜大程序,一般都需要外掛存儲器才能運行起來。而MCU往往只是執行刺激-響應式的過程控制和輔助,功能比較單一,僅僅需要使用片上集成的小存儲器即可。這是區別MPU和MCU的重要表象,但不是核心原因。總結一下,MPU和MCU的區別本質上是因為應用定位不同,為了滿足不同的應用場景而按不同方式優化出來的兩類器件。MPU注重通過較為強大的運算/處理能力,執行復雜多樣的大型程序,通常需要外掛大容量的存儲器。而MCU通常運行較為單一的任務,執行對于硬件設備的管理/控制功能。通常不需要很強的運算/處理能力,因此也不需要有大容量的存儲器來支撐運行大程序。通常以單片集成的方式在單個芯片內部集成小容量的存儲器實現系統的“單片化”。但需要指出的是,隨著技術的不斷演進。以上的產品形態也會發生一系列的變化和衍生。現在NXP已經開始推出主頻在1GHz,帶強大運算能力的MCU。而隨著3D封裝、Chiplet技術的進步,把大容量存儲器以先進封裝的方式實現“單片集成”也正在實現。所以這種技術名詞最終還是應該從他們出現的原因去理解,而不應該簡單的從一些形態、架構去解釋。更不應該機械的搞一些沒有什么意義的“定義”,還讓學生在考試的時候去回答。
5.1MCU和MPU的區別MCU在一塊芯片中集成了整個計算機系統,可以直接加簡單的外圍器件(電阻,電容)就可以運行代碼了。它本質上仍是一個完整的單片機,有處理器,有各種接口,所有的開發都是基于已經存在的系統架構,應用者要做的就是開發軟件程序和加外部設備。MPU如ARM的Cortex-A系列,直接放代碼是運行不了的,因為它本質上只是增強版的CPU,必須添加相應的RAM和ROM。5.2CPU與SoC的區別SoC可以認為是將MCU集成化與MPU強處理力各優點二合一,其中MCU是CPU集成了各類外設,MPU是增強版的CPU。目前芯片的發展方向是從CPU到SoC,現在已經沒有純粹的CPU了,都是SoC。
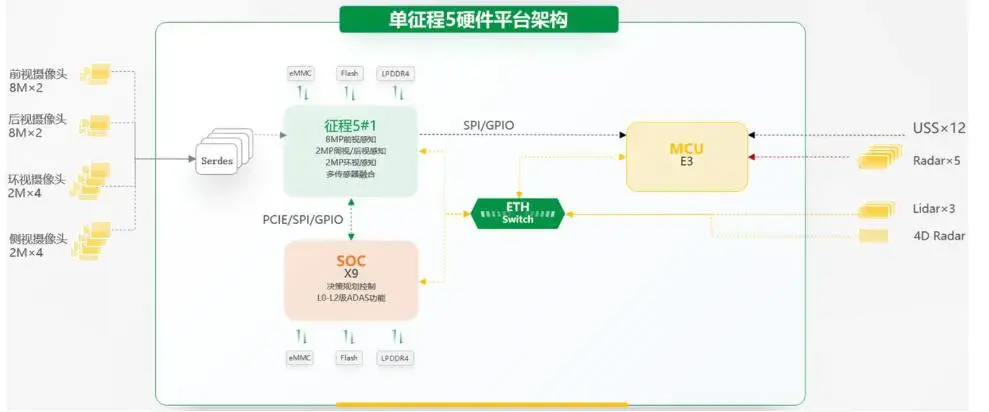
上圖基于J5的自動駕駛域控制器可見,包含一個MCU 和J5+X9倆SoC,而J5包含了八核Arm Cortex-A55MPU。
-
mcu
+關注
關注
146文章
17123瀏覽量
350982 -
soc
+關注
關注
38文章
4161瀏覽量
218162 -
MPU
+關注
關注
0文章
357瀏覽量
48775 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166383 -
DCU
+關注
關注
0文章
12瀏覽量
2678
發布評論請先 登錄
相關推薦
FPGA在自動駕駛領域有哪些應用?
FPGA在自動駕駛領域有哪些優勢?
自動駕駛真的會來嗎?
自動駕駛的到來
AI/自動駕駛領域的巔峰會議—國際AI自動駕駛高峰論壇
高級安全駕駛員輔助系統助力自動駕駛
UWB主動定位系統在自動駕駛中的應用實踐
如何讓自動駕駛更加安全?
自動駕駛汽車的處理能力怎么樣?
自動駕駛車SoC開發有什么雷區?
自動駕駛OS市場的現狀及未來 精選資料推薦
自動駕駛技術的實現
自動駕駛線控底盤VCU功能介紹
自動駕駛基礎架構






 工商網監
工商網監
評論