 艙駕融合一體化測試解決方案
艙駕融合一體化測試解決方案
作者 |ktw624
小編 | 不吃豬頭肉艙駕融合通過軟硬件的深度整合,實現了架構簡化、成本優化和性能提升,是智能汽車發展的必然趨勢。然而,這種融合也帶來諸多測試挑戰:ASIL B/D不同安全等級的功能共存、跨域資源協同調度、系統復雜度顯著提升等。研發測試過程中,為保證系統的功能正確性、系統穩定性及可靠性,需要構建一套完整的測試體系。為此,北匯信息推出一套系統仿真測試設備,用于應用功能的測試驗證,結合OS評測工具,實現測試用例與場景庫的對齊,評估場景驅動下的性能覆蓋指標。

艙駕融合的發展背景
隨著汽車產業智能化轉型提速,智能駕駛和智能座艙已成為行業發展重點。智能駕駛技術(L2級輔助駕駛功能)已逐漸成為車輛標配,而更高級別的自動駕駛技術(如NOA)正在特定場景下快速滲透;智能座艙則集成了先進的人機交互技術,如AR/VR、語音識別和人工智能,提供更加個性化和智能化的駕乘體驗。
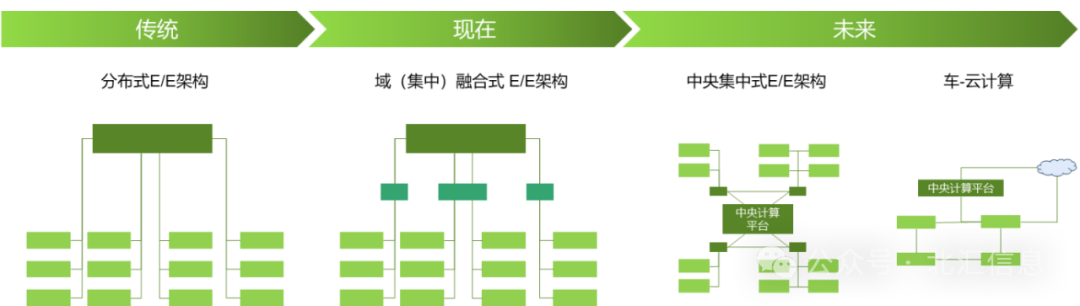
圖2 架構演進趨勢
傳統的分離式架構逐漸無法滿足日益增長的用戶需求和技術發展要求,汽車E/E架構從傳統的分布式架構正在向域融合、中央集中式加快演進,架構更加模塊模塊化、可拓展的同時,軟件和硬件不斷融合,艙駕融合應運而生。
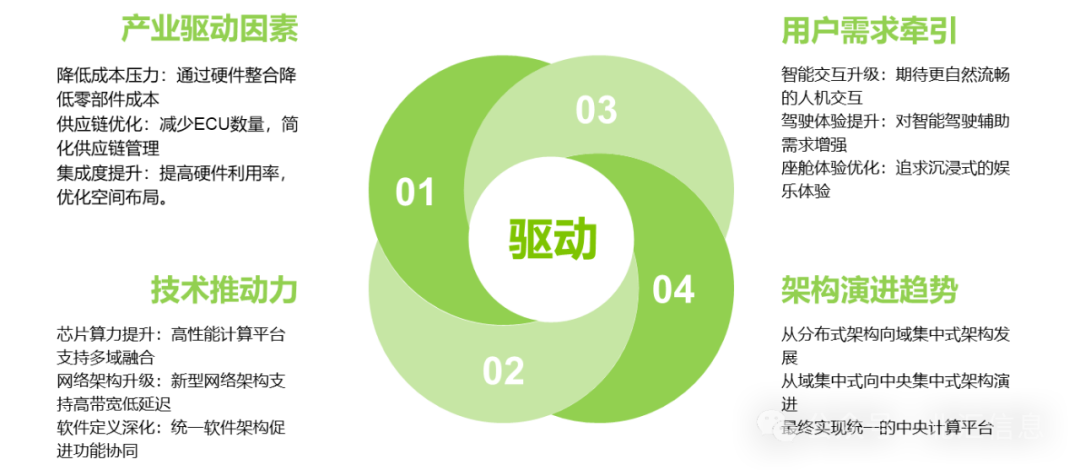
圖3 艙駕融合的驅動力

艙駕融合技術發展階段
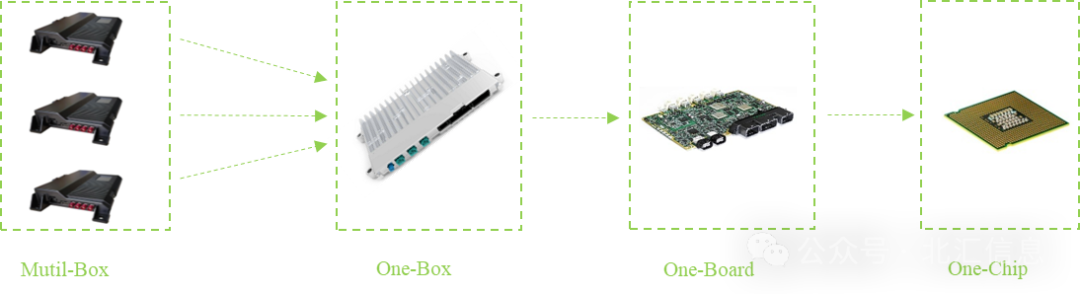
圖4 艙駕融合技術發展階段
艙駕融合的發展經歷了從表層到深層、從部分到整體的演進過程,主要分為以下三個階段:
域控硬件融合(One-Box)
座艙域和智駕域的板子獨立封裝在一個域控制器中
功能邏輯相對獨立
實現基礎的硬件整合,降低成本
PCB板級融合(One-Board)
在單一PCB板上同時集成座艙和智駕芯片
提高集成度,優化空間利用
資源共享程度提升
進一步降低系統復雜度
芯片級融合(One-Chip)
使用單一SoC實現所有功能
統一軟件架構設計
深度資源共享與調度
實現真正的艙駕一體化

艙駕融合面臨的挑戰
艙駕融合在推進過程中面臨著多維度的技術挑戰。從硬件層面來看,隨著集成度的提升,系統的功耗和散熱要求顯著提高,同時片內通信從有線到無線的演進也帶來了新的技術門檻。在軟件層面,挑戰更為復雜:功能安全要求的差異性、平臺兼容性問題、系統實時性要求、信息安全的挑戰。
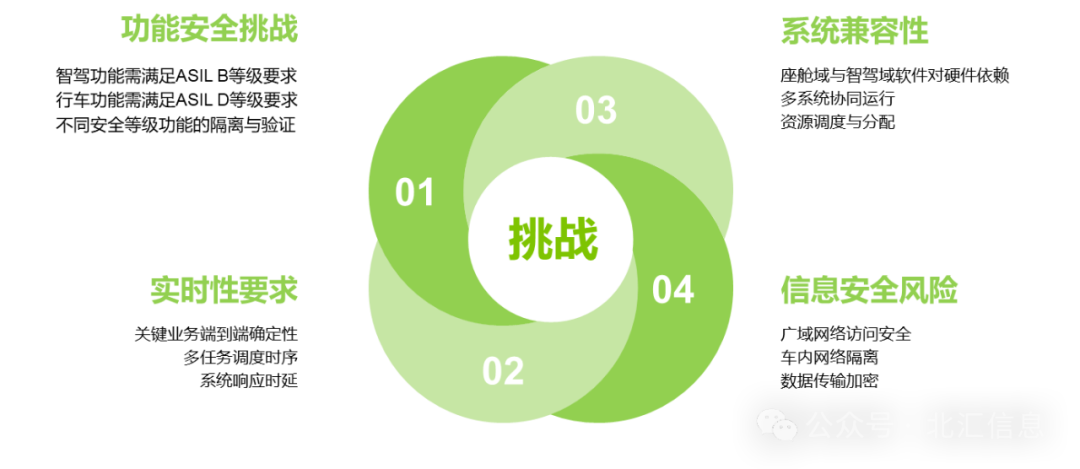
圖5 艙駕融合的挑戰
這些技術挑戰的解決,需要從架構設計、開發工具、測試驗證等多個維度同步推進,建立完整的技術解決方案,才能確保艙駕融合系統的可靠性和安全性。

艙駕融合一體化測試解決方案
智駕、座艙域底層軟件、應用層軟件的融合與解耦,對功能正確性、系統穩定性提出了更高的要求;為此,借助系統仿真測試設備,全面進行應用功能的測試驗證,再結合OS評測工具,實現測試用例與場景庫的對齊,評估場景驅動下的性能覆蓋指標。
系統仿真測試
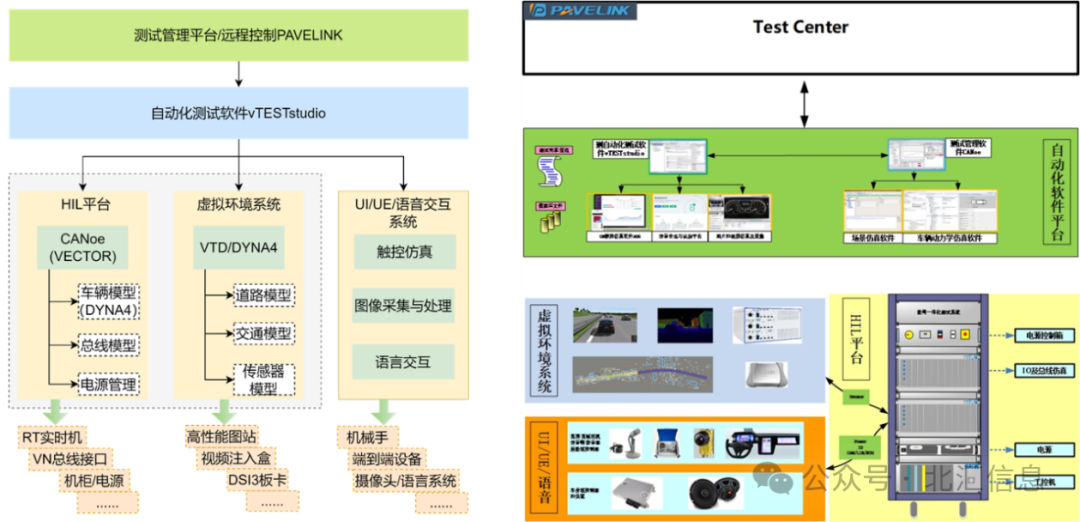
圖6 系統仿真測試
對于艙駕融合一體化控制器,使用一套HiL硬件平臺、仿真軟件測試平臺、結合傳感器仿真專用設備及UI/UE測試專用設備,實現智駕、座艙功能的自動化測試。
測試管理平臺/遠程控制PAVELINK:北匯信息自主開發的一款云控平臺,可實現自動化刷件、調用測試工程、調用測試腳本、上傳測試報告、測試用例管理、設備狀態監控等,持續集成、持續測試。(可適配用戶的云控平臺)
仿真軟件測試平臺:
自動化測試軟件vTESTstudio:提供自動化仿真搭建、腳本執行和測試管理試驗管理軟件CANoe:提供HiL測試系統的管理及運行環境,可配置IO資源及故障注入
虛擬場景仿真軟件VTD:提供道路交通模型、傳感器建模(包括毫米波雷達、攝像頭、超聲波雷達以及激光雷達等)
車輛動力學軟件DYNA4:提供車輛動力學模型
HiL硬件平臺VT HiL:包括實時處理器、總線接口卡、通用IO板卡、故障注入板卡等
傳感器仿真專用設備:視頻注入板卡、DSI3仿真板卡、回波盒等
UI/UE測試專用設備:機械臂、語音嘴、揚聲器、高清相機、ADB工具等
基于該套測試系統,可實現以下應用功能測試:
智駕功能測試:主動安全輔助功能、駕駛輔助功能(巡航、領航)、泊車輔助功能
座艙功能測試:人機交互頁面響應、語言識別準確性、手勢控制靈敏度等
跨域協同功能測試:駕駛信息同步、預警信息交互時序、環境感知識別顯示、功能模式切換響應等
系統穩定性測試
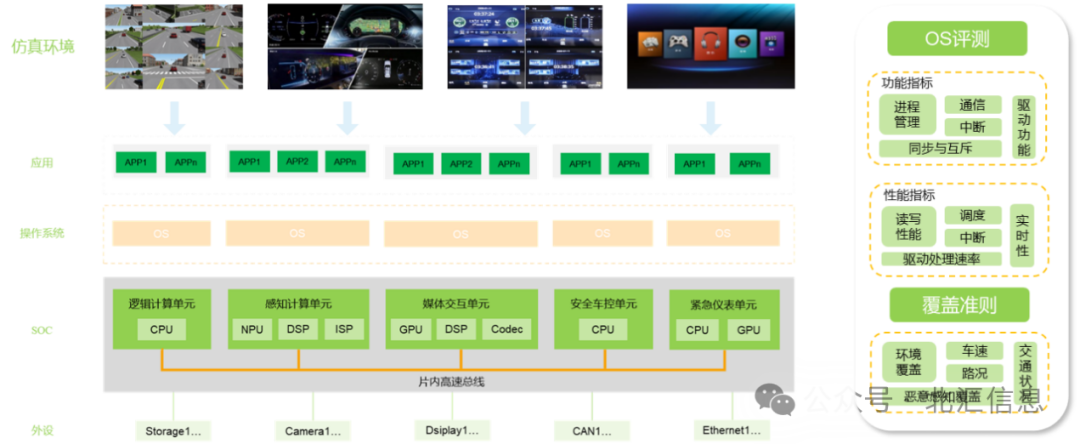
圖7 穩定性測試

結語
艙駕融合是智能汽車發展的必然趨勢,其測試驗證的重要性不言而喻。通過系統化的測試方案和專業的工具平臺,能夠有效保障艙駕融合系統的可靠性和安全性,為智能汽車產業健康發展提供有力支撐。
-
測試軟件
+關注
關注
2文章
49瀏覽量
13040 -
仿真測試
+關注
關注
0文章
81瀏覽量
11301 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166397
發布評論請先 登錄
相關推薦
超融合一體機屬于什么設備
物聯網水肥一體化系統方案
《嵌入式機電一體化系統設計與實現》讀后感
超融合一體機是服務器嗎?與服務器有什么區別
超融合一體機是什么意思?有什么好處
宏景智駕與芯擎科技攜手,實車驗證“艙泊一體”創新方案
宏景智駕聯合芯擎科技打造的“艙泊一體”方案完成實車驗證
安消一體化平臺建設方案
什么是機電一體化?它有哪些應用?
艙駕一體化對于國產算力芯片廠商的影響
什么是通感算一體化?通感算一體化的應用場景






 工商網監
工商網監
評論