


本文介紹了攝像頭及紅外成像的基本工作原理,攝像頭可以將看到的圖像真實(shí)的呈現(xiàn)出來(lái),所見(jiàn)即所得!
攝像頭如何工作?
攝像頭可以將看到的圖像真實(shí)的呈現(xiàn)出來(lái),所見(jiàn)即所得。
比如人眼看到的一座山的風(fēng)景,是這樣:

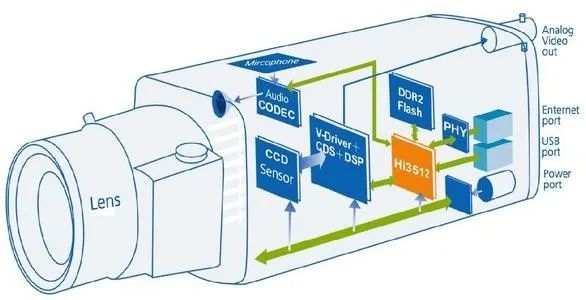
手機(jī)攝像頭設(shè)計(jì)后的外觀是這樣:

紅外攝像頭設(shè)計(jì)后的外觀是這樣:

如何將外界的圖像真實(shí)地呈現(xiàn)在芯片上?
對(duì)于芯片來(lái)說(shuō),外界圖像可以按不同區(qū)域進(jìn)行拆解,圖像按區(qū)域拆解后是這樣:
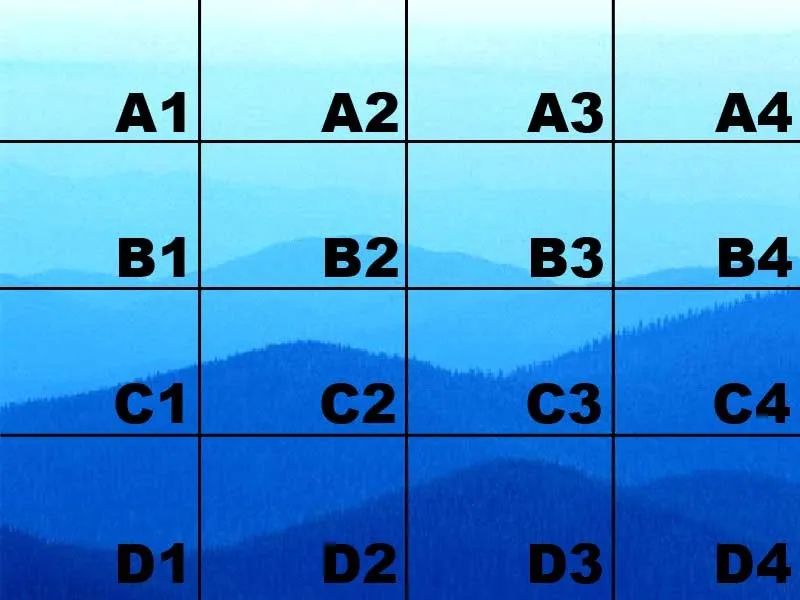
拆解后的圖片對(duì)芯片來(lái)講,是下面這樣:
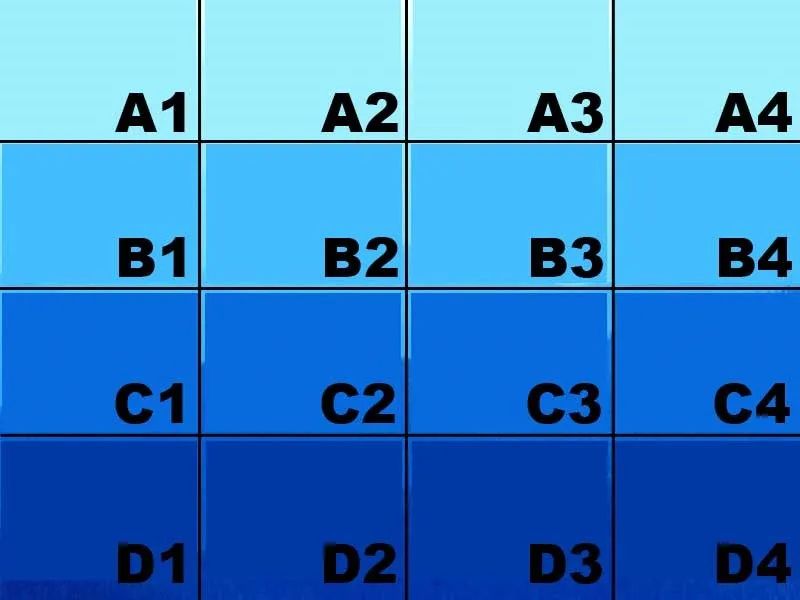
感光芯片的設(shè)計(jì)思想就是分割被描述的區(qū)域,用相應(yīng)的灰度來(lái)填充。
如果將圖像拆解的方格(像元)足夠小,就足夠顯示每一個(gè)圖片的細(xì)節(jié)。這就是為什么手機(jī)像素要向2000W,3000W甚至更高像素發(fā)展的原因。
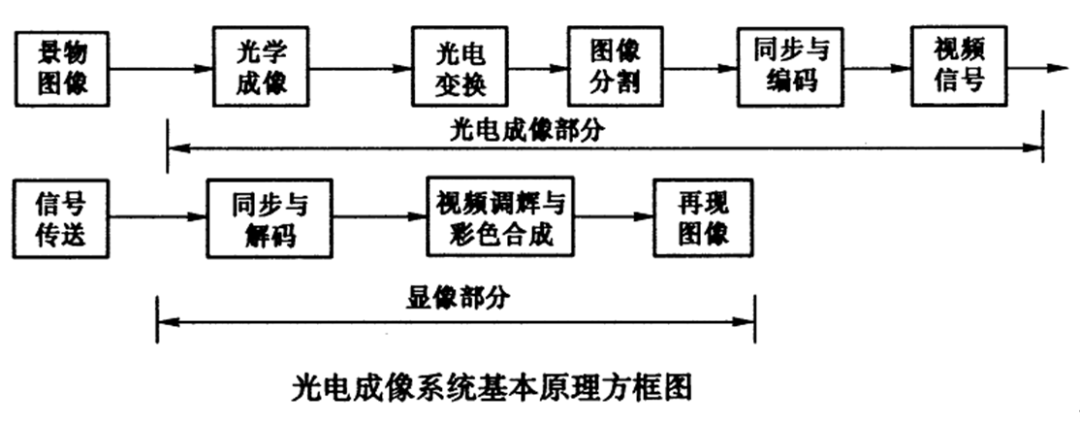
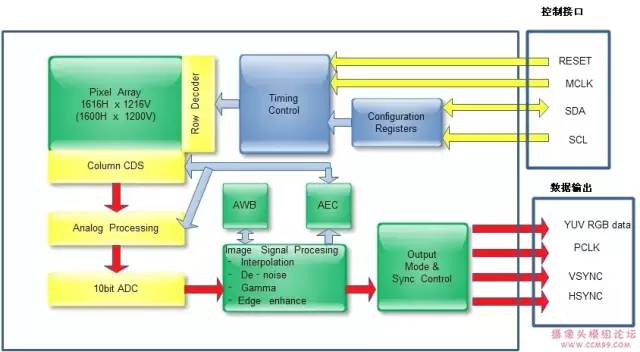
芯片雖然接收到了光信號(hào),要將接收到的光信號(hào)轉(zhuǎn)變成屏幕上的圖像,背后有一些運(yùn)算邏輯,大致過(guò)程是這樣:
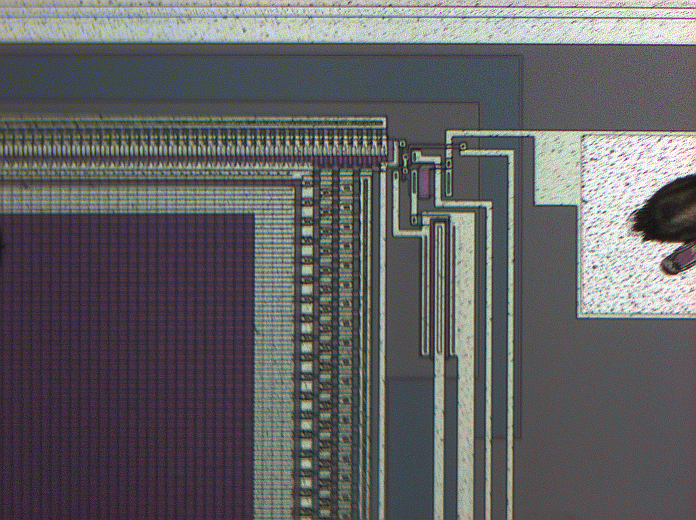
一張典型的光學(xué)芯片,在顯微鏡下觀察到的局部是下面這樣的,左下角暗紅色區(qū)域是接收光信號(hào)的成像區(qū)域,周圍黃色鍍金區(qū)域是電路連線,線路將光信號(hào)輸出到外部電路中。
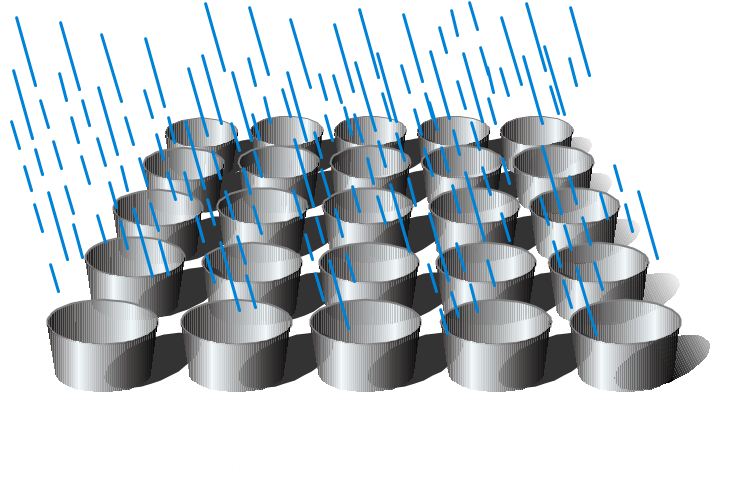
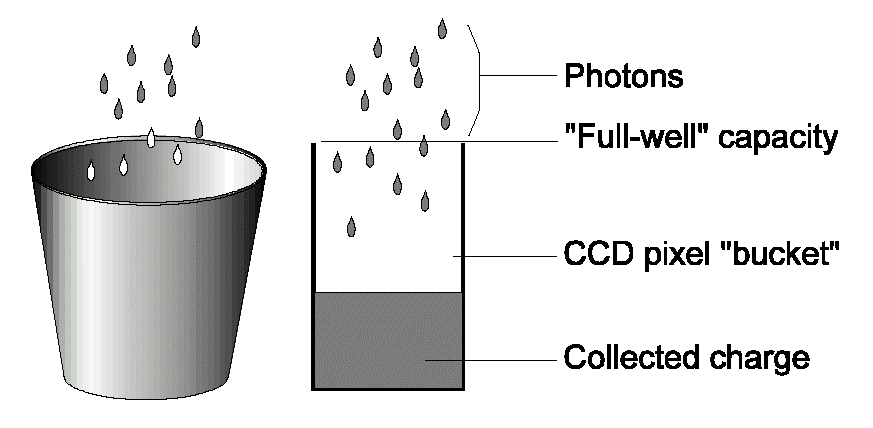
可以將芯片的成像區(qū)域比喻成一個(gè)個(gè)小桶,用來(lái)接收外部的光信號(hào)。
1.有一個(gè)光電轉(zhuǎn)換裝置把入射到每一個(gè)感光像素上的光子轉(zhuǎn)化為相應(yīng)數(shù)量的電荷。(小桶是像元,雨水是光信號(hào)。)
2.隨著芯片接收外部的光電子,這些電荷可以被儲(chǔ)存起來(lái)。
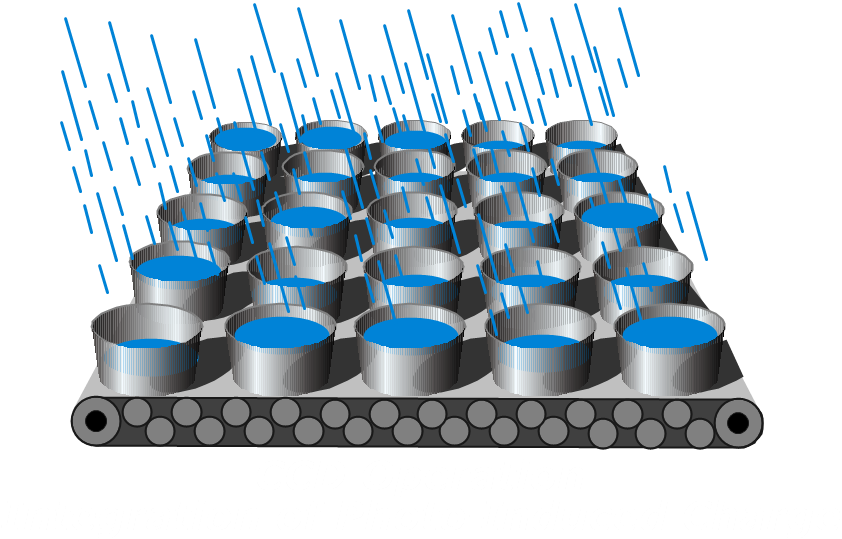
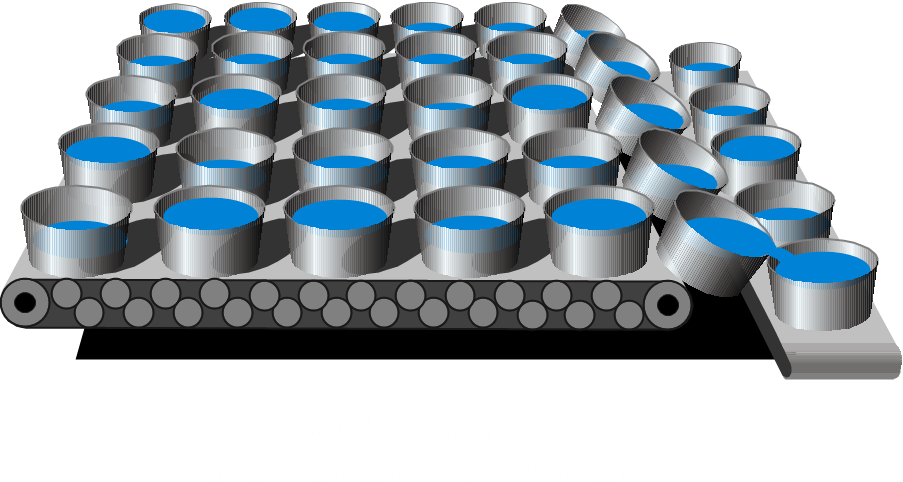
3.電荷可以被有秩序地轉(zhuǎn)移出感光區(qū)域。
光電轉(zhuǎn)化的原理
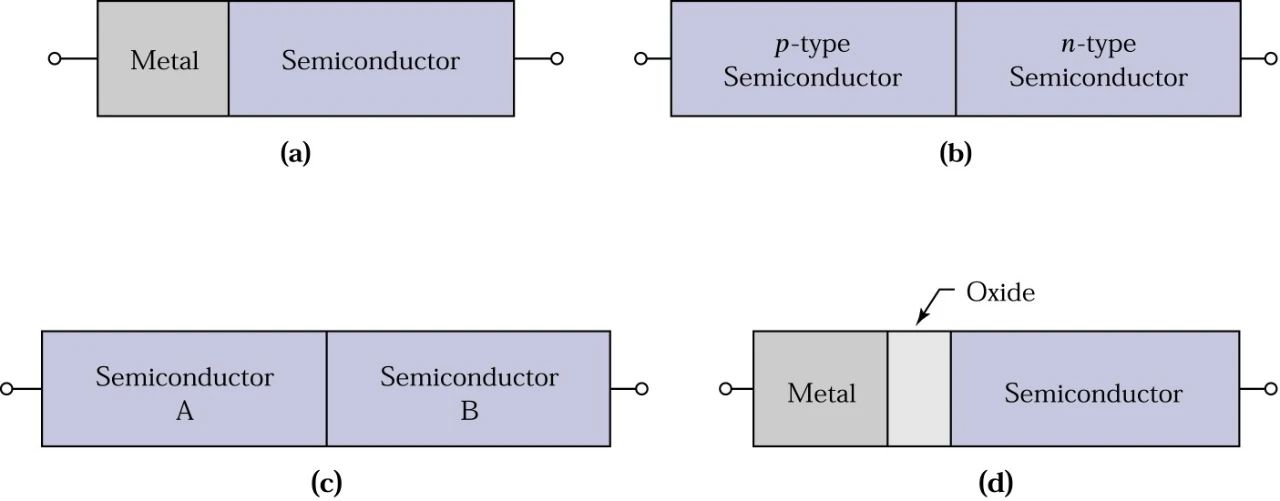
攝像頭單元部分,是一個(gè)由金屬-氧化物-半導(dǎo)體組成的電容器。
這一裝置能夠完成光電轉(zhuǎn)換。在P型單晶硅的襯底上做一層絕緣氧化膜,通過(guò)活化置換技術(shù)再在氧化膜表面做出許多排列整齊的可透光的電極,當(dāng)光線通過(guò)時(shí),氧化膜與P型單晶硅之間產(chǎn)生電荷,其電荷的數(shù)量與光照強(qiáng)度及照射時(shí)間成正比。
若在電極上施加一個(gè)適當(dāng)?shù)恼妷海瑫?huì)形成電荷耗盡區(qū),即能夠吸引電子的勢(shì)阱。
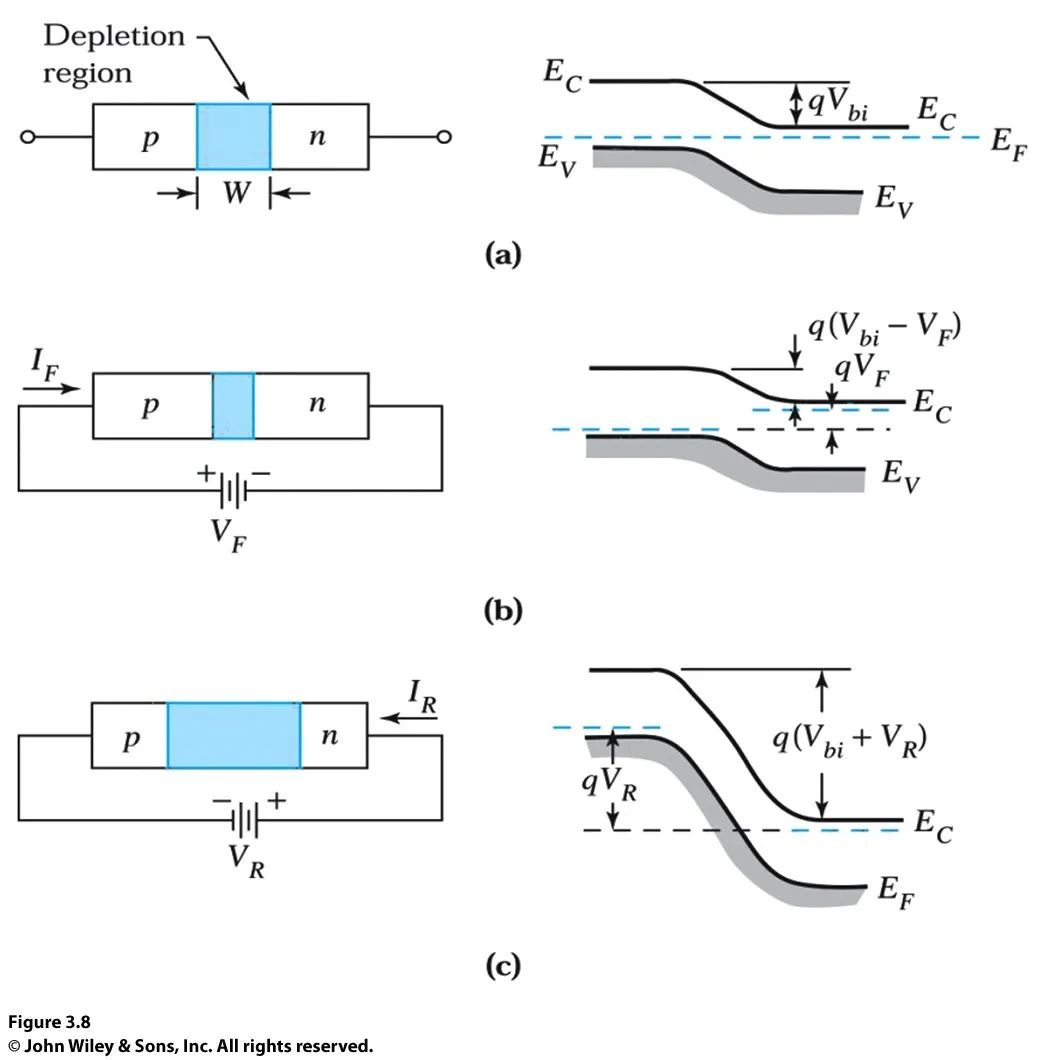
電極上所加的電壓越高,勢(shì)阱越深,電荷留在阱內(nèi)量越多。只要電壓存在,電子就能儲(chǔ)存在勢(shì)阱里。
當(dāng)景物的光照射到攝像頭時(shí),具有光敏特性的P型硅在光量子的激發(fā)下產(chǎn)生電子-空穴對(duì),空穴移向襯底而消失,電子進(jìn)入勢(shì)阱并存儲(chǔ)在那里。
由于絕緣氧化物層使得電子不能穿過(guò)而到達(dá)電極,因此存貯在勢(shì)阱里的電子形成了電荷包,其電荷量的多少與光照強(qiáng)度成正比,于是所有電極下的電荷包就組成了與景物相對(duì)應(yīng)的電荷像。
這一過(guò)程存在著以下問(wèn)題:
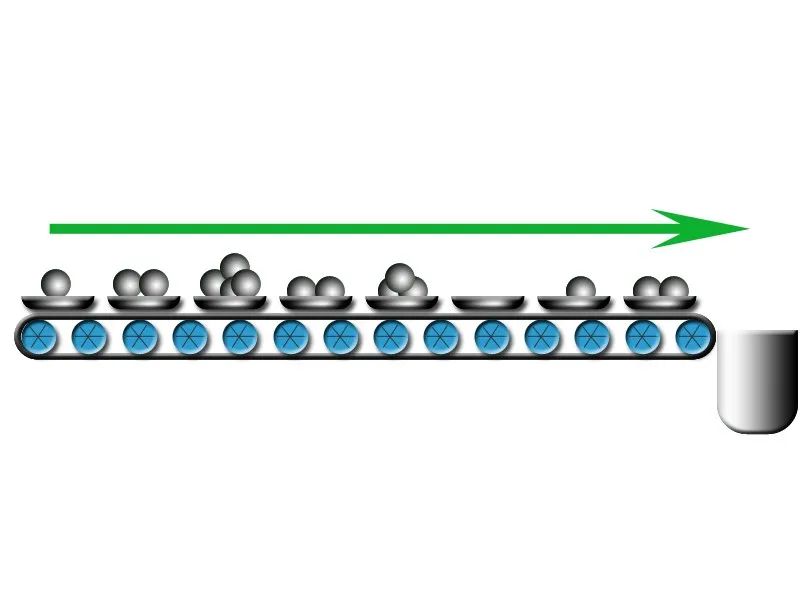
當(dāng)一個(gè)像素聚集過(guò)多的電荷后,就會(huì)出現(xiàn)電荷溢出,溢出的電荷會(huì)跑到相鄰的像素勢(shì)阱里去。這樣電荷的電量就不能如實(shí)反映原物。
要避免這種情況發(fā)生的方法:
(1)把桶做大些;
(2)減少測(cè)量時(shí)間;
(3)把裝滿水的桶倒出一些;
(4)做個(gè)導(dǎo)流管,讓溢出的水流到地上去,不要流到其它桶里。
對(duì)應(yīng)的方法:
(1)增大單位像素尺寸;
(2)縮短曝光時(shí)間;(缺點(diǎn):對(duì)于暗的部分曝光不足。)
(3)間歇開(kāi)關(guān)時(shí)鐘電壓;缺點(diǎn):會(huì)降低速度
(4)溢出溝道和溢出門;(缺點(diǎn):制作復(fù)雜,且還有缺陷)
所以,增大像素尺寸是最完善的做法。
電荷轉(zhuǎn)移
當(dāng)一個(gè)攝像頭芯片感光完畢后。每個(gè)像素所轉(zhuǎn)換的電荷包,就按照一行的方向轉(zhuǎn)移出攝像頭感光區(qū)域。為下一次感光釋放空間。
在同一個(gè)像素區(qū)域,應(yīng)該有電荷儲(chǔ)存空間和用來(lái)轉(zhuǎn)移的空間。這樣才能順利完成轉(zhuǎn)移。
勢(shì)阱的深淺由電極上所加電壓的大小決定。電荷在勢(shì)阱內(nèi)可以流動(dòng),它總是從相鄰淺阱里流進(jìn)深阱中,這種電荷流動(dòng)稱為電荷轉(zhuǎn)移。若有規(guī)律改變電極電壓,則勢(shì)阱的深度就會(huì)隨之變化,勢(shì)阱內(nèi)電荷就可以按人為確定的方向轉(zhuǎn)移,直到最終由輸出端輸出。
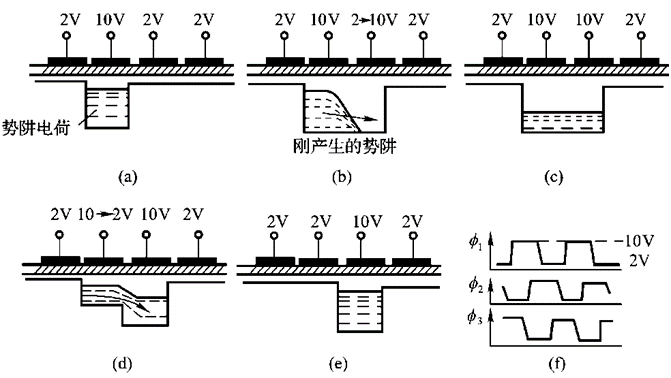
電荷轉(zhuǎn)移分單相驅(qū)動(dòng)、雙相驅(qū)動(dòng)、三相驅(qū)動(dòng)及四相驅(qū)動(dòng)等多種方式,除了電極構(gòu)造及所加電壓波形不同以外,其轉(zhuǎn)移原理是一樣的。
四相驅(qū)動(dòng)方式的驅(qū)動(dòng)電路比較復(fù)雜,但相鄰勢(shì)阱的深度差較大,電荷的存貯量也大,容易實(shí)現(xiàn)隔行掃描,在專業(yè)級(jí)攝像機(jī)中應(yīng)用較為廣泛。
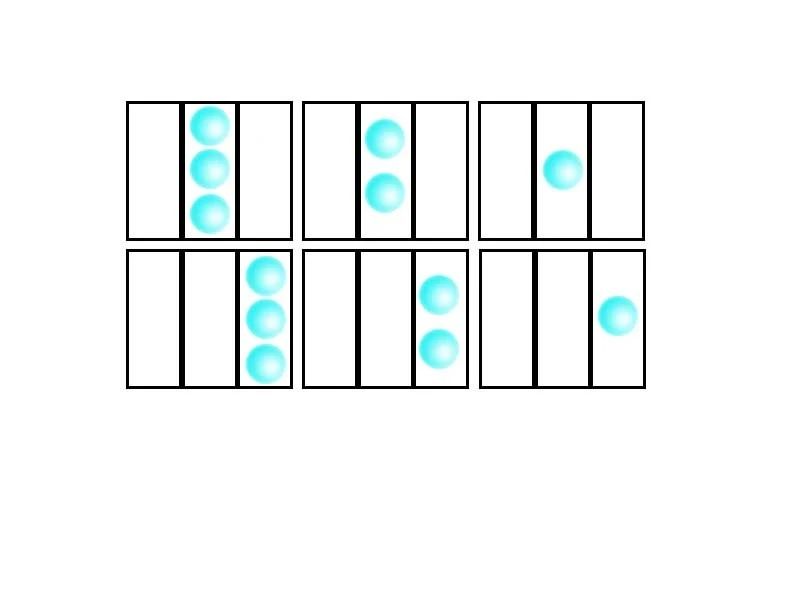
四相驅(qū)動(dòng)方式即將絕緣層上的電極按列的方式每四個(gè)分為一組,形成一個(gè)象素單元,每組電極分別加上不同的偏置電壓,則在電極下絕緣膜與P型硅之間就產(chǎn)生不同深度的勢(shì)阱,如果有規(guī)律地改變電極上的電壓值,使勢(shì)阱產(chǎn)生變化,就可以使電子定向移動(dòng),這也就是攝像頭的掃描讀出原理。
攝像頭光電信號(hào)轉(zhuǎn)移方式
攝像頭根據(jù)轉(zhuǎn)移電極結(jié)構(gòu)及轉(zhuǎn)移方式的不同又可以分成:
(1)InterlineTransfer(行間轉(zhuǎn)移)
(2)FullFrame(全幀)
(3)FrameTransfer(幀傳遞)
(4)Line (線陣)
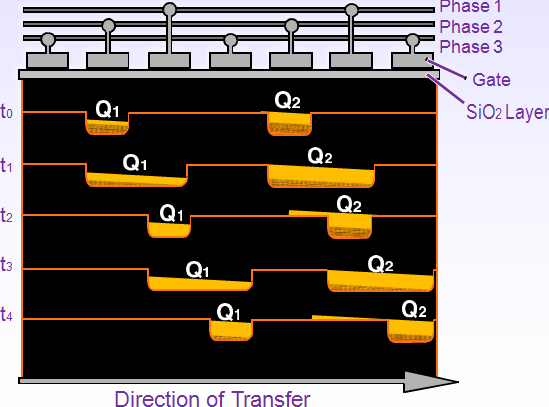
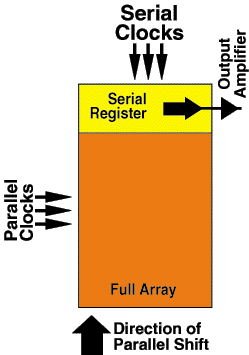
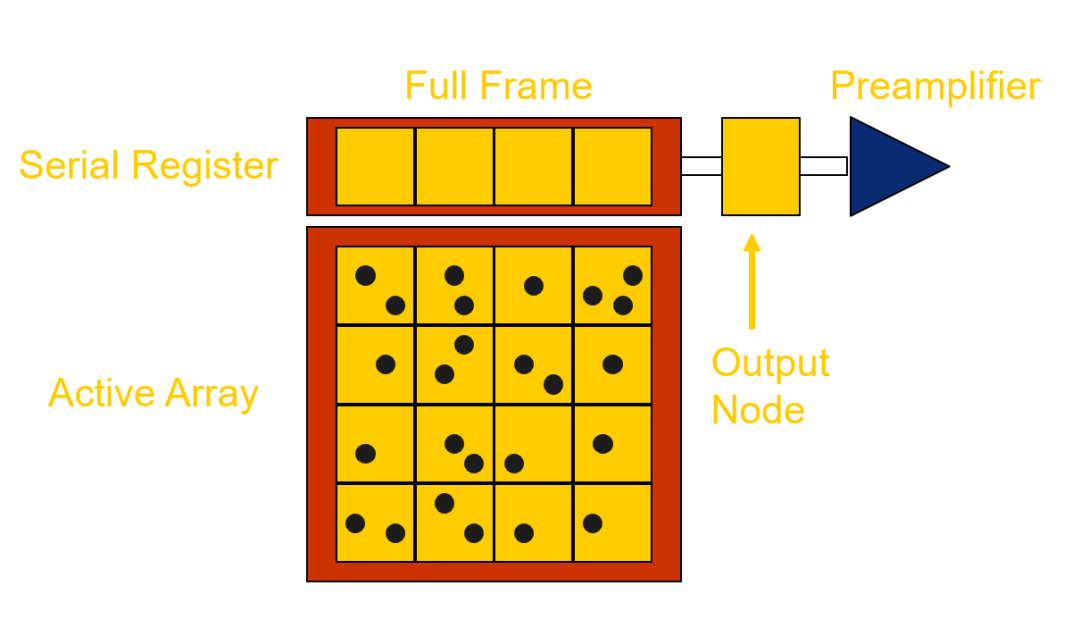
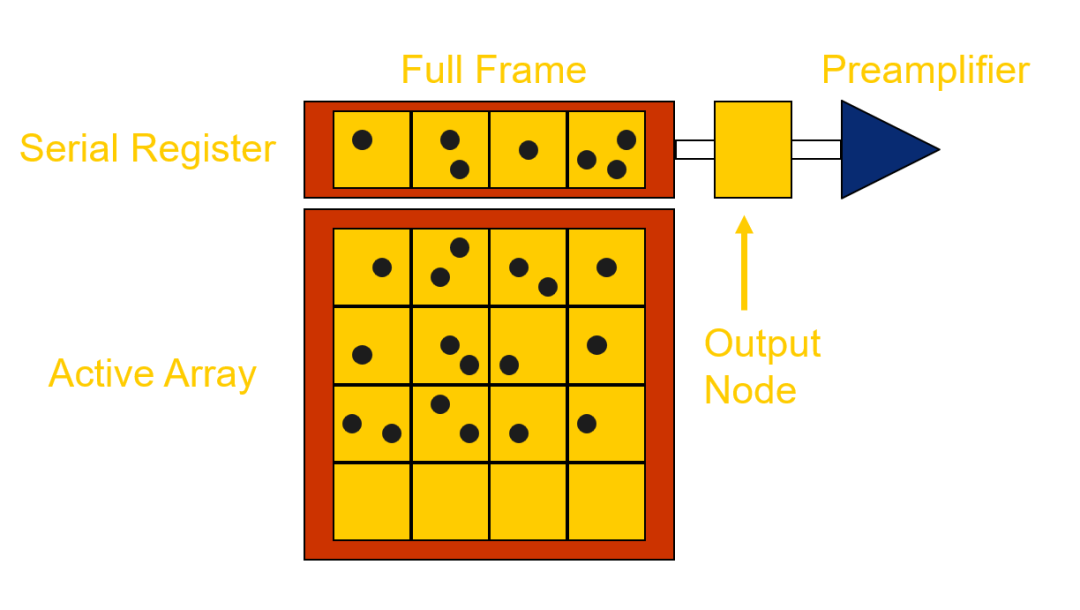
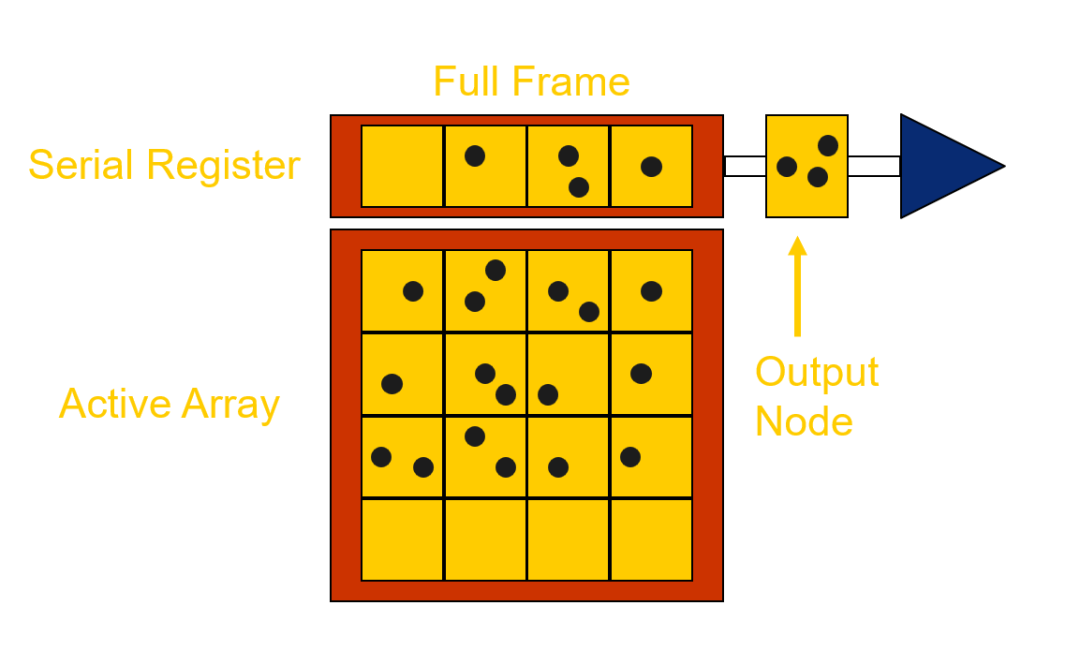
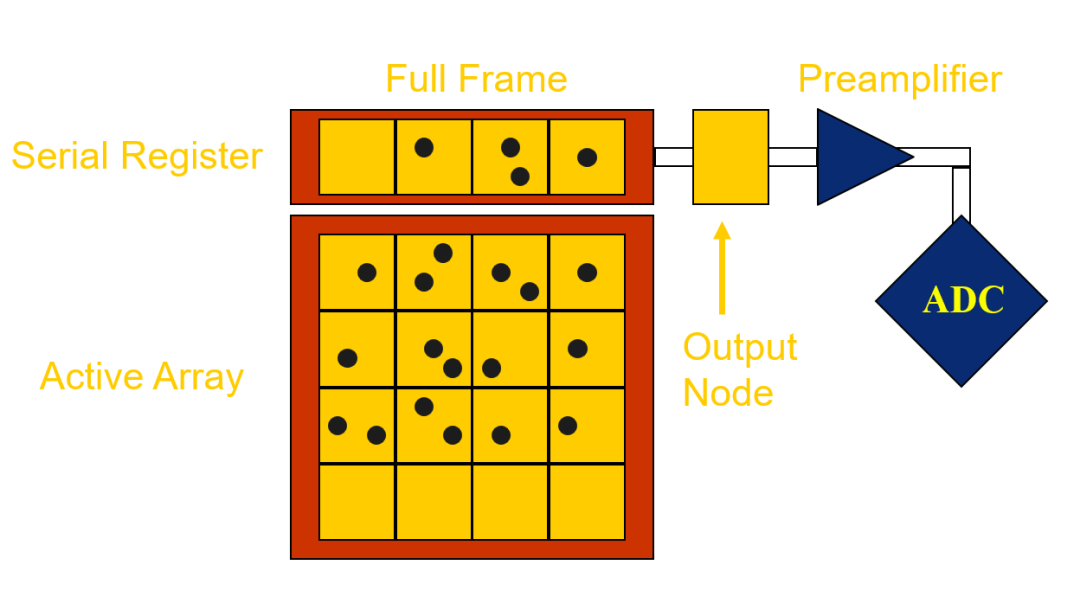
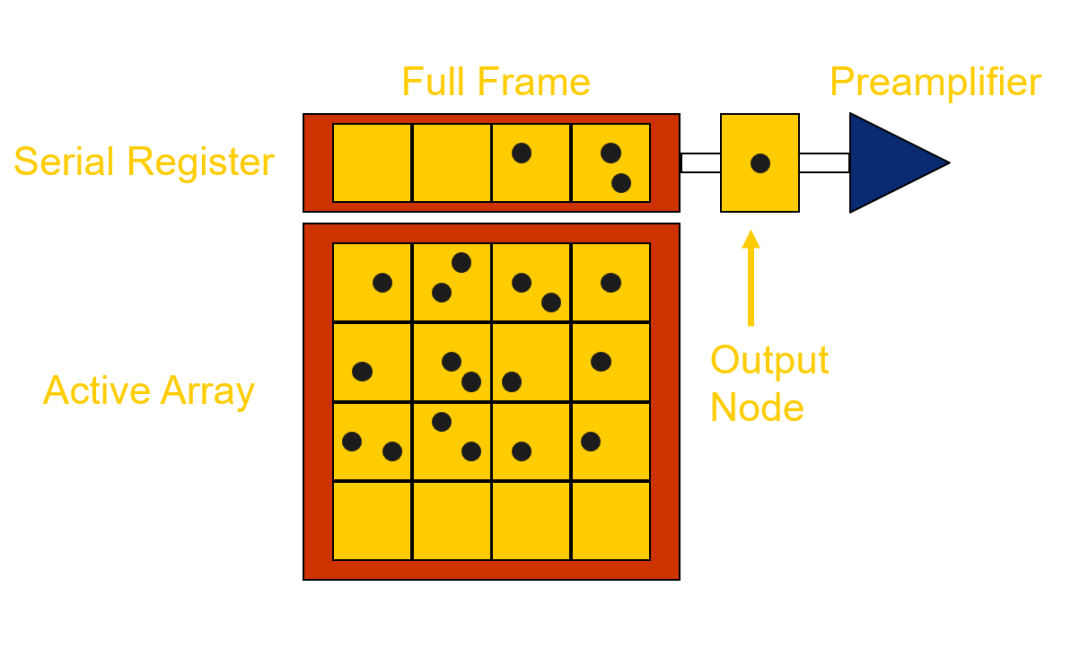
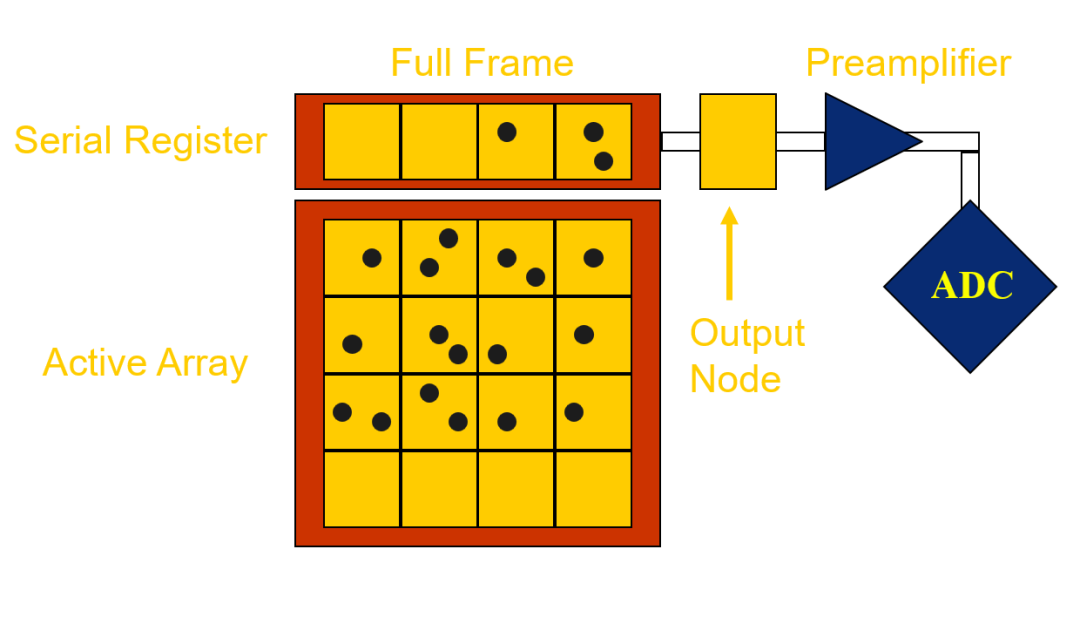
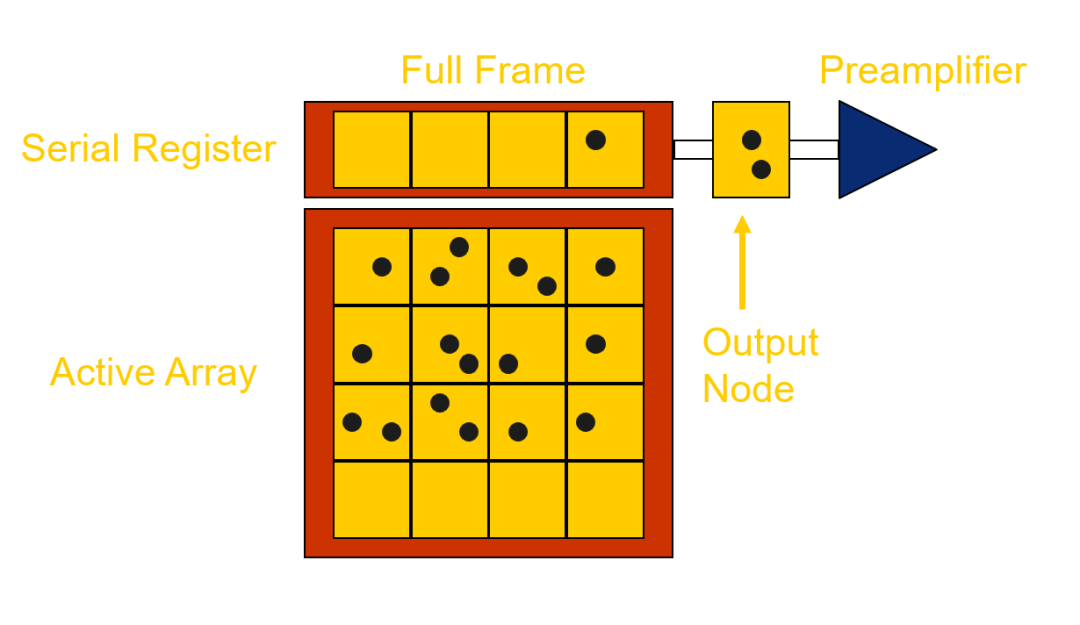
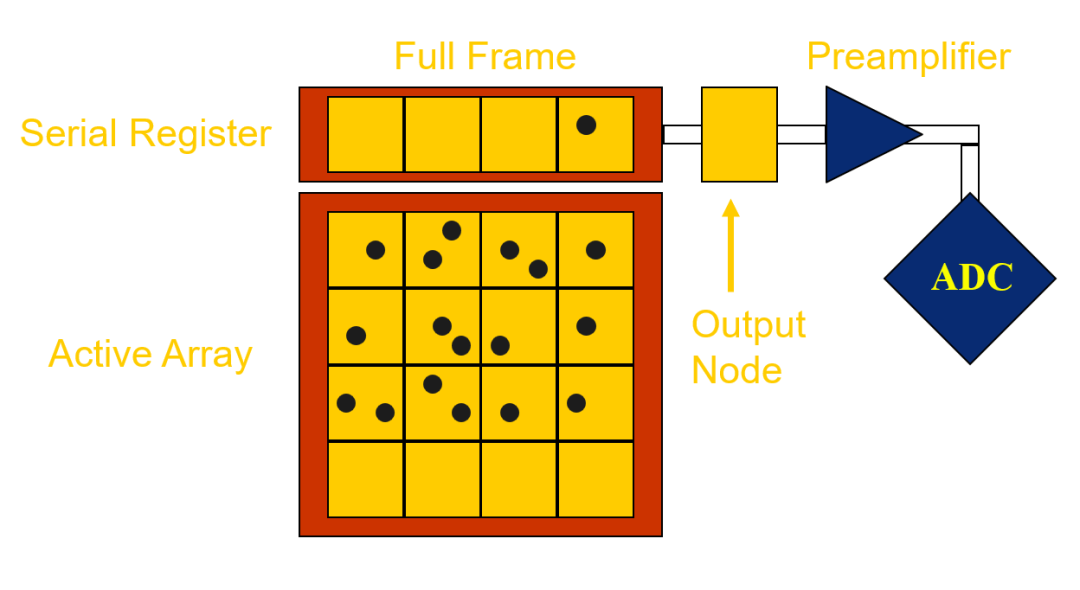
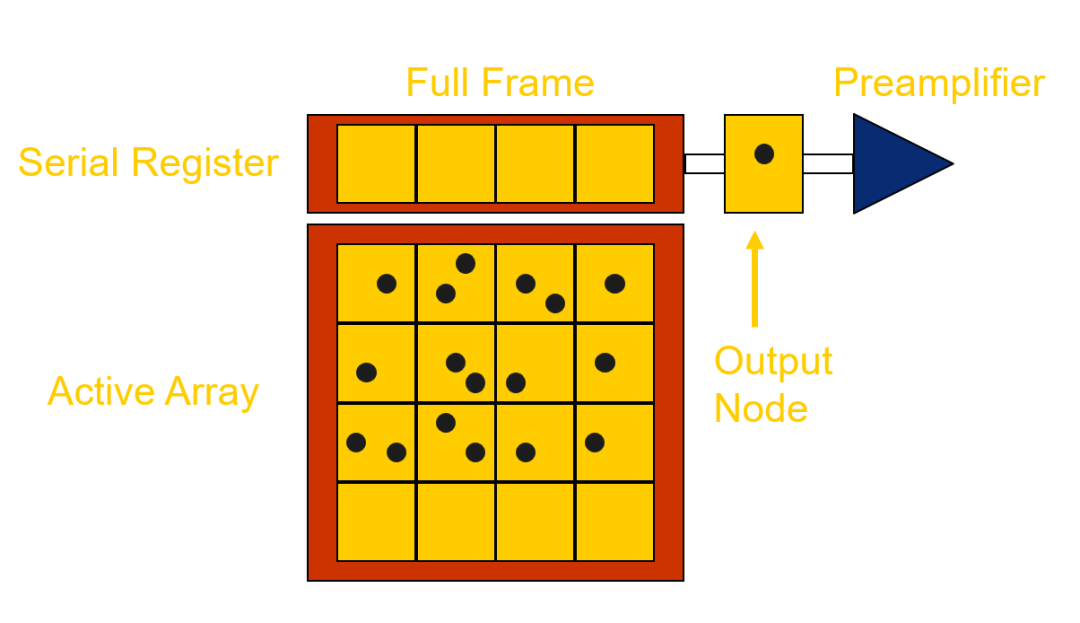
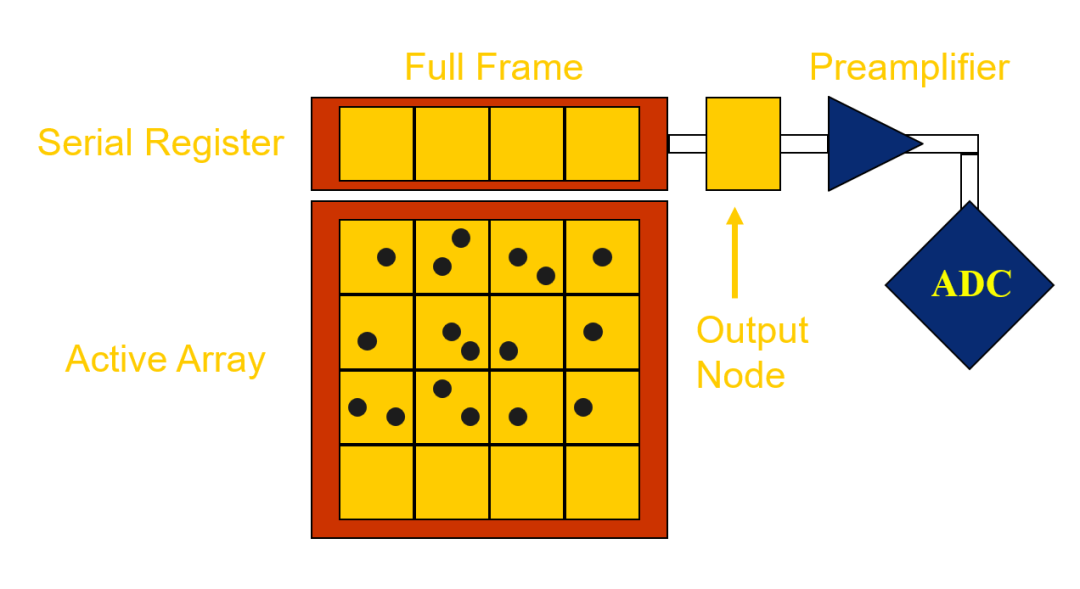
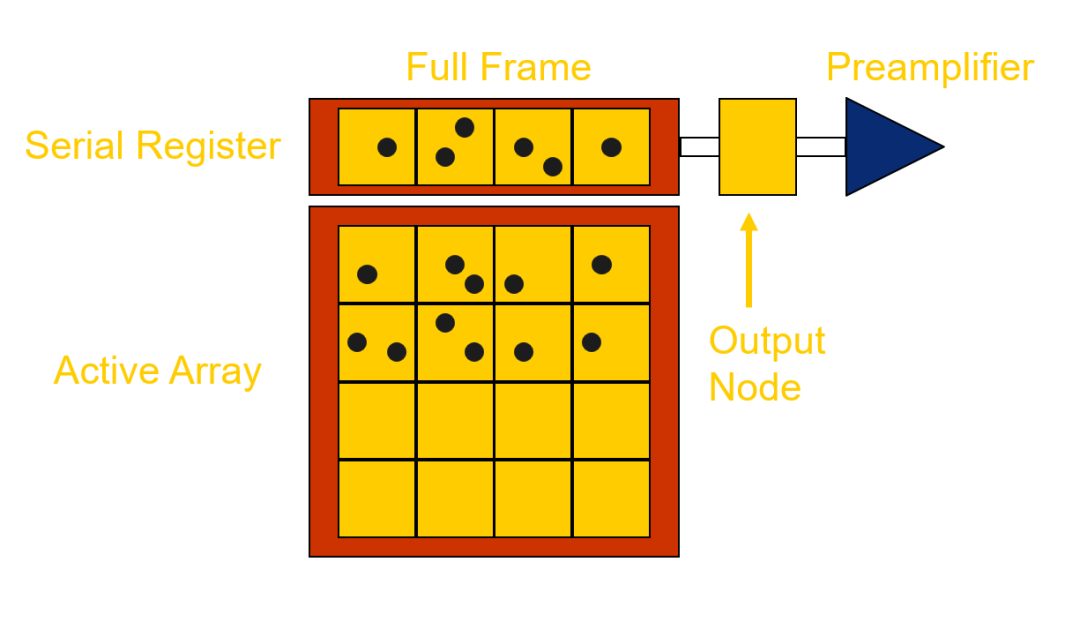
以最典型的FullFrame傳輸為例,陣列的每一個(gè)像素都感光。
傳輸時(shí),每一列向單行串行寄存器上相對(duì)應(yīng)的位置轉(zhuǎn)移。同時(shí),串行寄存器向陣列的出口轉(zhuǎn)移。
這是一種架構(gòu)更簡(jiǎn)單的感光設(shè)計(jì),F(xiàn)ull Frame可以利用整個(gè)感光區(qū)域(沒(méi)有寄存區(qū)的設(shè)計(jì)),有效的增大感光面積,同時(shí)也適應(yīng)長(zhǎng)時(shí)間曝光。
感光和電荷輸出過(guò)程是分開(kāi)的。
下面是相機(jī)在拍照過(guò)程中光電子傳輸形式,其中下面大的黃框代表芯片敏感元區(qū)域,也就是芯片成像區(qū)域,上面黃色條紋代表接收光電子的電路部分,芯片在接收光電子后,按行輸出光電子信號(hào),黑色點(diǎn)代表光電子數(shù)量和傳輸方向。
攝像頭的數(shù)據(jù)輸出形式
上面所述都是按照單行單列的模式進(jìn)行電荷傳輸?shù)摹T趯?shí)際應(yīng)用中如果單行的像素太多,會(huì)影響傳輸速度。這時(shí)可以使用多通道傳輸。
1. 單輸出(Single Tap) 通常是在低分辨率或低速的Line-scan Camera上的設(shè)計(jì),它的特性是感光后將光轉(zhuǎn)成電荷信號(hào)通過(guò)單一輸出將數(shù)據(jù)傳遞出去。
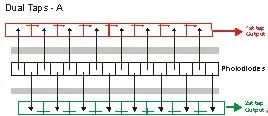
2. 奇偶雙輸出 (Dual Taps) 通常是在高分辨率或?yàn)榱颂岣邆鬏斔俣鹊脑O(shè)計(jì),它的特性是感光后分成奇數(shù)及偶數(shù)將光轉(zhuǎn)成電荷信號(hào)分成兩組將數(shù)據(jù)傳遞出去。要是不小心設(shè)定成單輸出,影像就會(huì)如同上圖所示,影像會(huì)有垂直的空隙,影像在放大時(shí)便會(huì)發(fā)現(xiàn)pixel 跟 pixel 中間的黑色影像,其實(shí)數(shù)據(jù)都是空的。

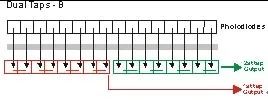
3. 前后雙輸出 (Dual Taps) 通常是在高分辨率或?yàn)榱颂岣邆鬏斔俣鹊脑O(shè)計(jì),它的特性是在感光后分成前半段及后半段將光轉(zhuǎn)成電荷信號(hào)分成兩組將數(shù)據(jù)傳遞出去。要是不小心設(shè)定成單輸出,影像就會(huì)如上圖所示,影像只有一半,另一半變成黑色影像,其實(shí)數(shù)據(jù)都是空的。

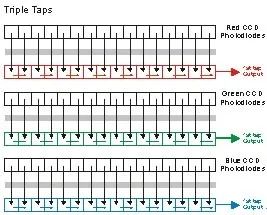
4. 三輸出 (Triple Taps)
通常是用在RGB 彩色攝像頭上,棱鏡會(huì)依據(jù)光譜的波長(zhǎng)特性(紅光波長(zhǎng)最長(zhǎng),再來(lái)是綠光,再來(lái)是藍(lán)光)分別將光線投射至紅、綠、藍(lán)三組攝像頭上,每個(gè)攝像頭分別將光轉(zhuǎn)成電荷信號(hào)輸出,雖然三組攝像頭分別有獨(dú)立的 Data Clock,但是因?yàn)楸仨氁猂, G, B 的數(shù)據(jù)組合在一起才會(huì)變成彩色影像,所以實(shí)際速度并沒(méi)有因?yàn)槊總€(gè)攝像頭有獨(dú)立的 Data Clock而加快。
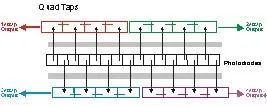
5. 四輸出 (Quad Taps)
通常是在高分辨率或?yàn)榱颂岣邆鬏斔俣鹊脑O(shè)計(jì),結(jié)合了雙輸出的奇偶輸出加上前后段輸出的特性分成四組,讓取像速度加快變成四倍。
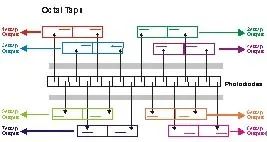
6. 八輸出 (Octal Taps) 目前這類設(shè)計(jì)出現(xiàn)在超高分辨率的機(jī)種上,除了分出前后段,而且各分出四組輸出,因此取像速度可以提高成八倍而不會(huì)因?yàn)榉直媛屎芨叨顾俣却蟠蠼档汀?
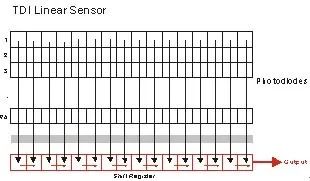
7. TDI( Timing Delay Integration ) 時(shí)間延遲積分
它的攝像頭結(jié)構(gòu)比較特殊,并非是單排感光而是96排一起感光,即同樣的一次曝光時(shí)間下它會(huì)累積96排的感光量轉(zhuǎn)換成電荷信號(hào)之后再傳輸出去,由于累積的亮度較一般的攝像頭高,故較適合應(yīng)用在光線較暗無(wú)法提供充足亮度的系統(tǒng)上。但是這種型式十分注重取像頻率及運(yùn)動(dòng)速度的一致性,要是運(yùn)動(dòng)速度不穩(wěn)定取像出來(lái)會(huì)有模糊的情形。
-
攝像頭
+關(guān)注
關(guān)注
61文章
4987瀏覽量
98589 -
紅外成像
+關(guān)注
關(guān)注
0文章
97瀏覽量
11646
原文標(biāo)題:攝像頭及成像芯片是如何工作的?
文章出處:【微信號(hào):bdtdsj,微信公眾號(hào):中科院半導(dǎo)體所】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
攝像頭的工作原理 Product information
手機(jī)camera攝像頭工作原理
USB 攝像頭
ISP和攝像頭工作原理
什么是CCD,ccd攝像頭工作原理
ccd攝像頭工作原理
攝像頭的工作原理
紅外線攝像頭報(bào)價(jià)
關(guān)于攝像頭模組工作原理分析和應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論