
") 爆火的端到端如何加速智駕落地?
爆火的端到端如何加速智駕落地?
編者語(yǔ):「智駕最前沿」微信公眾號(hào)后臺(tái)回復(fù):C-0551,獲取本文參考報(bào)告:《智能汽車端到端技術(shù)研究報(bào)告》pdf下載方式。
“端到端”無(wú)疑是2024年自動(dòng)駕駛行業(yè)最火熱的一個(gè)詞了!(相關(guān)閱讀:實(shí)現(xiàn)自動(dòng)駕駛,唯有端到端?)端到端技術(shù)通過(guò)消除模塊間數(shù)據(jù)傳遞中的信息損耗和延遲,以神經(jīng)網(wǎng)絡(luò)驅(qū)動(dòng)感知到控制輸出的直接轉(zhuǎn)換,有效提升系統(tǒng)的決策效率與整體性能。端到端技術(shù)的應(yīng)用在智能駕駛領(lǐng)域日益受到重視。傳統(tǒng)的自動(dòng)駕駛技術(shù)基于模塊化架構(gòu),將感知、決策、規(guī)劃和控制等功能模塊分別處理,以實(shí)現(xiàn)最終的車輛控制。盡管模塊化設(shè)計(jì)在早期階段為自動(dòng)駕駛的發(fā)展奠定了堅(jiān)實(shí)基礎(chǔ),但隨著行業(yè)向更高自動(dòng)化級(jí)別邁進(jìn),模塊化架構(gòu)暴露出效率低下、信息傳遞損耗等問(wèn)題。為解決這些痛點(diǎn),端到端架構(gòu)逐步進(jìn)入行業(yè)視野,并逐漸成為推動(dòng)L4及以上高級(jí)別自動(dòng)駕駛發(fā)展的關(guān)鍵路徑。端到端智能駕駛系統(tǒng)借助深度學(xué)習(xí)模型,將傳感器輸入直接映射為車輛控制指令,避免了傳統(tǒng)模塊化設(shè)計(jì)中的冗余轉(zhuǎn)換步驟,使得系統(tǒng)能夠?qū)崿F(xiàn)全局最優(yōu)和高效的計(jì)算性能。
端到端技術(shù)概述
1.1 端到端技術(shù)的定義與分類
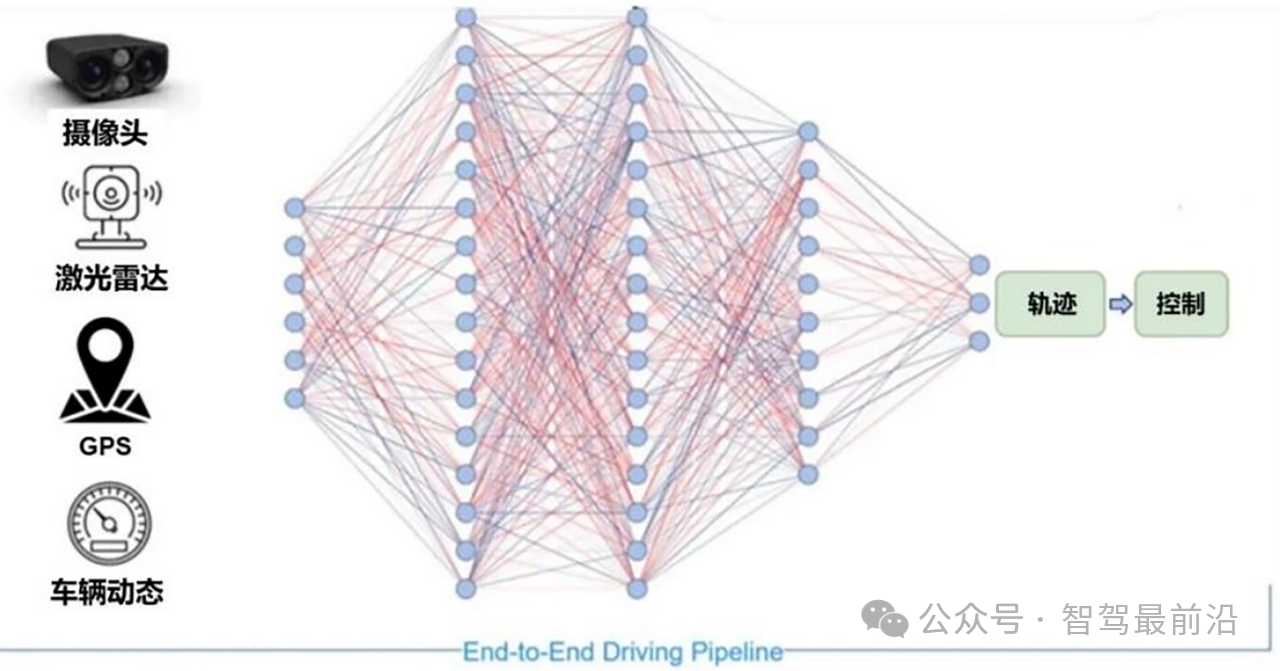
端到端技術(shù)在智能駕駛領(lǐng)域是指由傳感器獲取的數(shù)據(jù)直接通過(guò)深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)模型處理,輸出具體的車輛控制指令,實(shí)現(xiàn)從“感知”到“決策”的一體化過(guò)程,端到端智能駕駛系統(tǒng)一般可以分為狹義和廣義兩種類型:狹義端到端指的是通過(guò)單一神經(jīng)網(wǎng)絡(luò)模型將傳感器數(shù)據(jù)(如攝像頭圖像或激光雷達(dá)信息)直接轉(zhuǎn)化為車輛的控制信號(hào),包括轉(zhuǎn)向角、加速和制動(dòng)等動(dòng)作指令。該模式完全基于神經(jīng)網(wǎng)絡(luò)進(jìn)行數(shù)據(jù)處理,省去了中間的顯式數(shù)據(jù)接口和規(guī)則設(shè)定,整個(gè)過(guò)程全由神經(jīng)網(wǎng)絡(luò)驅(qū)動(dòng)。狹義端到端模式能夠顯著提高系統(tǒng)的集成度和信息處理效率,但由于其完全依賴數(shù)據(jù)驅(qū)動(dòng),模型訓(xùn)練對(duì)數(shù)據(jù)和算力的要求極高。

狹義端到端自動(dòng)駕駛架構(gòu)
廣義端到端則允許在感知、決策和規(guī)劃模塊之間保留人工設(shè)定的接口,以實(shí)現(xiàn)分階段處理。廣義端到端雖然保留了部分模塊化特征,但也利用了神經(jīng)網(wǎng)絡(luò)的端到端學(xué)習(xí)能力,通過(guò)模塊間特征向量的設(shè)計(jì)降低信息損失。廣義端到端的設(shè)計(jì)既可以降低算法復(fù)雜度,又在一定程度上保證了數(shù)據(jù)傳遞的精確性和系統(tǒng)的整體性能。這種廣義架構(gòu)為端到端系統(tǒng)的過(guò)渡奠定了基礎(chǔ),為大規(guī)模應(yīng)用提供了更高的靈活性。
廣義端到端自動(dòng)駕駛架構(gòu)
1.2 端到端架構(gòu)的優(yōu)勢(shì)
端到端技術(shù)之所以在智能駕駛領(lǐng)域備受青睞,主要是由于其在信息傳遞效率、系統(tǒng)計(jì)算性能和泛化能力等方面的優(yōu)勢(shì)。傳統(tǒng)模塊化方案中,由于數(shù)據(jù)在感知、決策、規(guī)劃和控制之間頻繁傳遞,系統(tǒng)的反應(yīng)速度和實(shí)時(shí)性受到影響,且多次轉(zhuǎn)換過(guò)程會(huì)導(dǎo)致誤差累計(jì)和信息丟失。端到端架構(gòu)可以顯著減少信息傳遞的損耗。通過(guò)使用單一的神經(jīng)網(wǎng)絡(luò)模型,傳感器數(shù)據(jù)可以在不經(jīng)多次轉(zhuǎn)換的情況下直接用于控制決策,從而有效降低信息在模塊間傳遞的丟失和延遲。此外,端到端系統(tǒng)通過(guò)壓縮模塊化設(shè)計(jì)中的子模塊數(shù)量,實(shí)現(xiàn)了系統(tǒng)架構(gòu)的簡(jiǎn)化,有助于降低車輛計(jì)算系統(tǒng)的功耗和體積,從而更適合大規(guī)模商業(yè)化量產(chǎn)。端到端架構(gòu)在系統(tǒng)計(jì)算效率方面也具有顯著優(yōu)勢(shì)。由于系統(tǒng)不再需要多個(gè)模塊的分層處理,而是采用深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)一次性進(jìn)行感知、決策、規(guī)劃和控制的全局優(yōu)化,端到端架構(gòu)在信息處理速度上較傳統(tǒng)系統(tǒng)有明顯提升。此外,端到端系統(tǒng)能夠高效學(xué)習(xí)和適應(yīng)新場(chǎng)景的能力,其泛化能力得到顯著提升。基于神經(jīng)網(wǎng)絡(luò)的深度學(xué)習(xí)模型在海量數(shù)據(jù)中自適應(yīng)學(xué)習(xí),在面對(duì)陌生或極端環(huán)境時(shí),端到端模型比傳統(tǒng)規(guī)則驅(qū)動(dòng)的模塊化方案具有更強(qiáng)的應(yīng)對(duì)能力。
技術(shù)架構(gòu)及實(shí)現(xiàn)方法
2.1 端到端的三階段架構(gòu)
端到端系統(tǒng)在實(shí)現(xiàn)過(guò)程中通常分為三個(gè)階段,分別是感知“端到端”、模塊化“端到端”和OneModel(單一模型)端到端,這三個(gè)階段是端到端技術(shù)逐步成熟并向單一模型收斂的路徑。
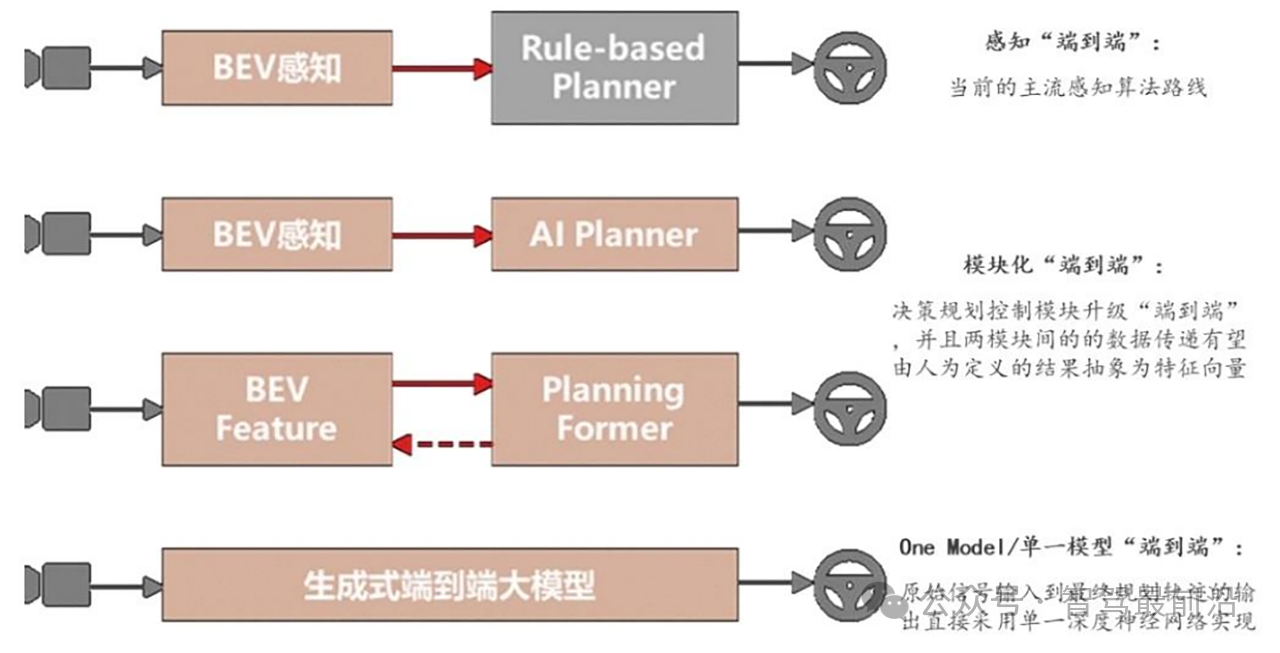
端到端自動(dòng)駕駛架構(gòu)演進(jìn)示意圖
感知“端到端”:在端到端技術(shù)的初步實(shí)現(xiàn)中,感知模塊是端到端神經(jīng)網(wǎng)絡(luò)的主要應(yīng)用場(chǎng)景。該階段利用基于多傳感器融合的神經(jīng)網(wǎng)絡(luò)模型處理感知任務(wù),以實(shí)現(xiàn)多維度數(shù)據(jù)融合和深度特征提取。常見的方案是采用鳥瞰視角(BEV)結(jié)合Transformer結(jié)構(gòu),通過(guò)對(duì)場(chǎng)景的整體特征建模,實(shí)現(xiàn)精確的目標(biāo)檢測(cè)和障礙物識(shí)別。目前,感知“端到端”是行業(yè)中應(yīng)用最廣泛的端到端方案,在自動(dòng)駕駛感知領(lǐng)域有較大的技術(shù)成熟度。模塊化“端到端”:在感知端到端的基礎(chǔ)上,逐步將決策和規(guī)劃模塊引入神經(jīng)網(wǎng)絡(luò)模型中,形成模塊化端到端體系。在該階段,控制模塊不再依賴于傳統(tǒng)的規(guī)則設(shè)計(jì),而是通過(guò)深度學(xué)習(xí)模型生成控制決策。為避免感知到控制之間的數(shù)據(jù)傳遞損耗,模塊間采用特征向量形式進(jìn)行數(shù)據(jù)交換。模塊化端到端實(shí)現(xiàn)了感知、決策和規(guī)劃之間的協(xié)調(diào)與數(shù)據(jù)無(wú)損傳遞,是端到端技術(shù)逐步向一體化系統(tǒng)過(guò)渡的階段。OneModel端到端:最終形態(tài)的端到端系統(tǒng)以單一神經(jīng)網(wǎng)絡(luò)模型實(shí)現(xiàn)從傳感器數(shù)據(jù)輸入到車輛運(yùn)動(dòng)軌跡的輸出。OneModel在架構(gòu)上實(shí)現(xiàn)了模塊融合,打破了感知、決策和規(guī)劃之間的界限,直接輸出路徑規(guī)劃結(jié)果。該模型主要基于強(qiáng)化學(xué)習(xí)和模仿學(xué)習(xí)技術(shù)訓(xùn)練,通過(guò)自動(dòng)化的數(shù)據(jù)特征學(xué)習(xí)避免了人為規(guī)則的干預(yù)。OneModel端到端是端到端技術(shù)的理想狀態(tài),具備更高的系統(tǒng)集成度和全局最優(yōu)能力。
2.2 模仿學(xué)習(xí)與強(qiáng)化學(xué)習(xí)
在端到端系統(tǒng)的訓(xùn)練過(guò)程中,模仿學(xué)習(xí)(Imitation Learning)和強(qiáng)化學(xué)習(xí)(Reinforcement Learning)是主流的神經(jīng)網(wǎng)絡(luò)訓(xùn)練方法。模仿學(xué)習(xí)通過(guò)模仿專家駕駛行為,讓神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)駕駛的最佳策略。模仿學(xué)習(xí)采用行為克隆(Behavior Cloning)和逆最優(yōu)控制(Inverse Optimal Control)等算法,主要目標(biāo)是將人類專家駕駛數(shù)據(jù)作為輸入,讓模型在不同駕駛環(huán)境中學(xué)習(xí)最佳響應(yīng)策略。模仿學(xué)習(xí)的優(yōu)點(diǎn)在于學(xué)習(xí)過(guò)程較為直接,但對(duì)數(shù)據(jù)依賴度高,且在復(fù)雜場(chǎng)景中容易出現(xiàn)泛化問(wèn)題。強(qiáng)化學(xué)習(xí)則是通過(guò)構(gòu)建獎(jiǎng)勵(lì)函數(shù)和環(huán)境模型,使得智能體通過(guò)不斷試錯(cuò)優(yōu)化駕駛策略。相比模仿學(xué)習(xí),強(qiáng)化學(xué)習(xí)在端到端技術(shù)中表現(xiàn)出更強(qiáng)的適應(yīng)性。通過(guò)設(shè)計(jì)合理的獎(jiǎng)勵(lì)函數(shù),強(qiáng)化學(xué)習(xí)可以在不斷的訓(xùn)練過(guò)程中提升模型應(yīng)對(duì)復(fù)雜場(chǎng)景的能力。然而,強(qiáng)化學(xué)習(xí)的設(shè)計(jì)難點(diǎn)在于如何準(zhǔn)確地定義獎(jiǎng)勵(lì)函數(shù),以適應(yīng)道路、天氣、車輛動(dòng)態(tài)等多種環(huán)境的變化。
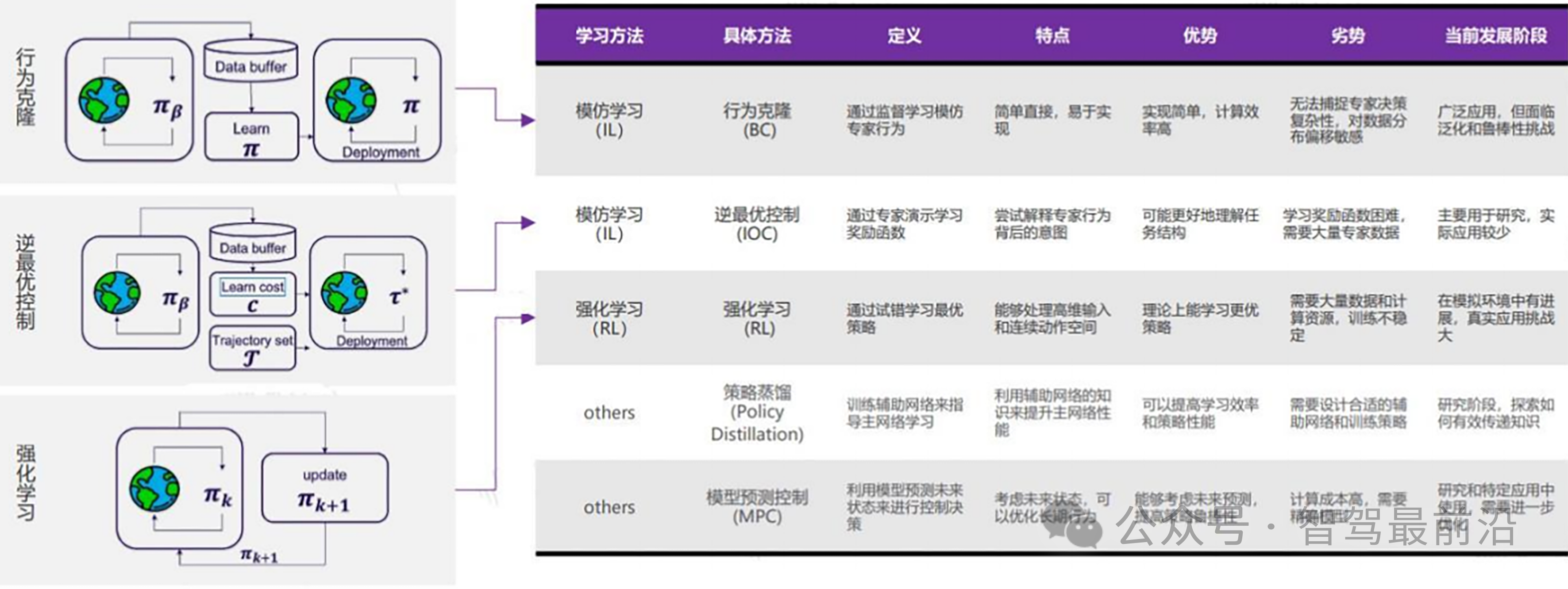
端到端自動(dòng)駕駛背后的基本訓(xùn)練方法
端到端技術(shù)的價(jià)值與優(yōu)勢(shì)分析
3.1 全局優(yōu)化與系統(tǒng)效率
端到端系統(tǒng)實(shí)現(xiàn)了從感知到?jīng)Q策的全局優(yōu)化,在系統(tǒng)整體性能和計(jì)算效率方面相較傳統(tǒng)方案具備顯著優(yōu)勢(shì)。在傳統(tǒng)模塊化設(shè)計(jì)中,系統(tǒng)需要通過(guò)不同模塊之間的多次信息傳遞完成復(fù)雜的智能駕駛?cè)蝿?wù),每個(gè)模塊之間的連接不僅需要大量的接口設(shè)計(jì),還導(dǎo)致了信息傳遞的損耗。端到端架構(gòu)則通過(guò)深度神經(jīng)網(wǎng)絡(luò)模型,實(shí)現(xiàn)了數(shù)據(jù)從輸入到輸出的一次性處理,使得整個(gè)過(guò)程能夠圍繞最終的控制目標(biāo)進(jìn)行最優(yōu)計(jì)算。在系統(tǒng)計(jì)算效率方面,端到端架構(gòu)通過(guò)壓縮多重任務(wù)的分布式計(jì)算,將不同模塊整合為單一神經(jīng)網(wǎng)絡(luò)模型,顯著減少了計(jì)算資源的消耗,使系統(tǒng)更高效。特別是在執(zhí)行控制過(guò)程中,端到端架構(gòu)能夠迅速對(duì)外界環(huán)境的變化做出反應(yīng),并生成實(shí)時(shí)的駕駛指令,以達(dá)到較高的響應(yīng)速度。此外,由于端到端系統(tǒng)以神經(jīng)網(wǎng)絡(luò)模型為核心,系統(tǒng)的整體計(jì)算架構(gòu)可以更緊湊,為車輛上路提供了更輕量化和低功耗的方案,有助于降低車輛的硬件成本。
3.2 信息無(wú)損傳遞與泛化能力
傳統(tǒng)模塊化架構(gòu)雖然穩(wěn)定且具有良好的可解釋性,但由于多模塊分割,導(dǎo)致信息傳遞過(guò)程中產(chǎn)生丟失和延遲,且模塊之間的誤差逐層累積,影響了系統(tǒng)的整體性能。端到端架構(gòu)通過(guò)避免中間數(shù)據(jù)轉(zhuǎn)換,實(shí)現(xiàn)了信息的無(wú)損傳遞,有效提高了系統(tǒng)的精確度和可靠性。
3.3 系統(tǒng)簡(jiǎn)化與可靠性提升
端到端架構(gòu)相較于傳統(tǒng)模塊化架構(gòu)的另一顯著優(yōu)勢(shì)是系統(tǒng)結(jié)構(gòu)的簡(jiǎn)化。傳統(tǒng)自動(dòng)駕駛系統(tǒng)包括感知、決策、規(guī)劃和控制等多個(gè)模塊,每個(gè)模塊需單獨(dú)處理一部分信息,并依賴上一個(gè)模塊的輸出。然而,這種層層傳遞的模式在實(shí)際應(yīng)用中易導(dǎo)致信息滯后、誤差疊加等問(wèn)題,最終影響系統(tǒng)的實(shí)時(shí)性和安全性。端到端系統(tǒng)通過(guò)統(tǒng)一的神經(jīng)網(wǎng)絡(luò)架構(gòu),直接將輸入數(shù)據(jù)轉(zhuǎn)化為控制信號(hào),無(wú)需依賴中間模塊,這不僅減少了復(fù)雜的接口設(shè)計(jì),也使得系統(tǒng)更易于維護(hù)和更新。此外,端到端系統(tǒng)的可靠性也得到了顯著提升。由于端到端架構(gòu)通過(guò)深度學(xué)習(xí)算法直接在大規(guī)模數(shù)據(jù)集上進(jìn)行訓(xùn)練,它能夠適應(yīng)多種場(chǎng)景和環(huán)境變化,不再局限于預(yù)定義的規(guī)則,具有極強(qiáng)的環(huán)境自適應(yīng)性。特別是在極端天氣條件、復(fù)雜道路狀況和突發(fā)交通事件中,端到端系統(tǒng)可以通過(guò)已學(xué)習(xí)到的綜合特征進(jìn)行快速?zèng)Q策,提高車輛在非結(jié)構(gòu)化道路中的行駛安全性。這種靈活性和魯棒性使得端到端技術(shù)在未來(lái)自動(dòng)駕駛的普及過(guò)程中具有重要價(jià)值。
市場(chǎng)進(jìn)展與產(chǎn)業(yè)化應(yīng)用
4.1 學(xué)術(shù)研究進(jìn)展
近年來(lái),端到端技術(shù)在智能駕駛領(lǐng)域的應(yīng)用逐步加深,許多學(xué)術(shù)研究和技術(shù)論文對(duì)端到端系統(tǒng)的架構(gòu)、算法優(yōu)化和訓(xùn)練方法進(jìn)行了探討。例如,2023年CVPR大會(huì)上由上海人工智能實(shí)驗(yàn)室提出的UniAD模型獲得了最佳論文獎(jiǎng)。UniAD模型采用了一種基于多任務(wù)學(xué)習(xí)的聯(lián)合優(yōu)化框架,通過(guò)整合感知、預(yù)測(cè)、規(guī)劃等多個(gè)任務(wù),提升了系統(tǒng)在端到端路徑規(guī)劃方面的效率和安全性。UniAD模型的核心架構(gòu)基于Transformer,能夠?qū)崿F(xiàn)對(duì)多種輸入數(shù)據(jù)的有效處理。其特征提取過(guò)程中,分別設(shè)計(jì)了TrackFormer、MapFormer、MotionFormer等模塊,以實(shí)現(xiàn)對(duì)動(dòng)態(tài)交通元素、道路信息和車輛交互的全方位理解。特別是該模型將傳統(tǒng)模塊化的規(guī)劃算法整合入統(tǒng)一的端到端網(wǎng)絡(luò)框架,最終生成車輛的行車軌跡和規(guī)劃路徑,并通過(guò)碰撞檢驗(yàn)確保行駛安全。UniAD的創(chuàng)新之處在于它將多任務(wù)學(xué)習(xí)和端到端優(yōu)化相結(jié)合,為端到端智能駕駛的實(shí)現(xiàn)提供了有力支持,并為未來(lái)的實(shí)際應(yīng)用打下了理論基礎(chǔ) 。
4.2 產(chǎn)業(yè)應(yīng)用案例
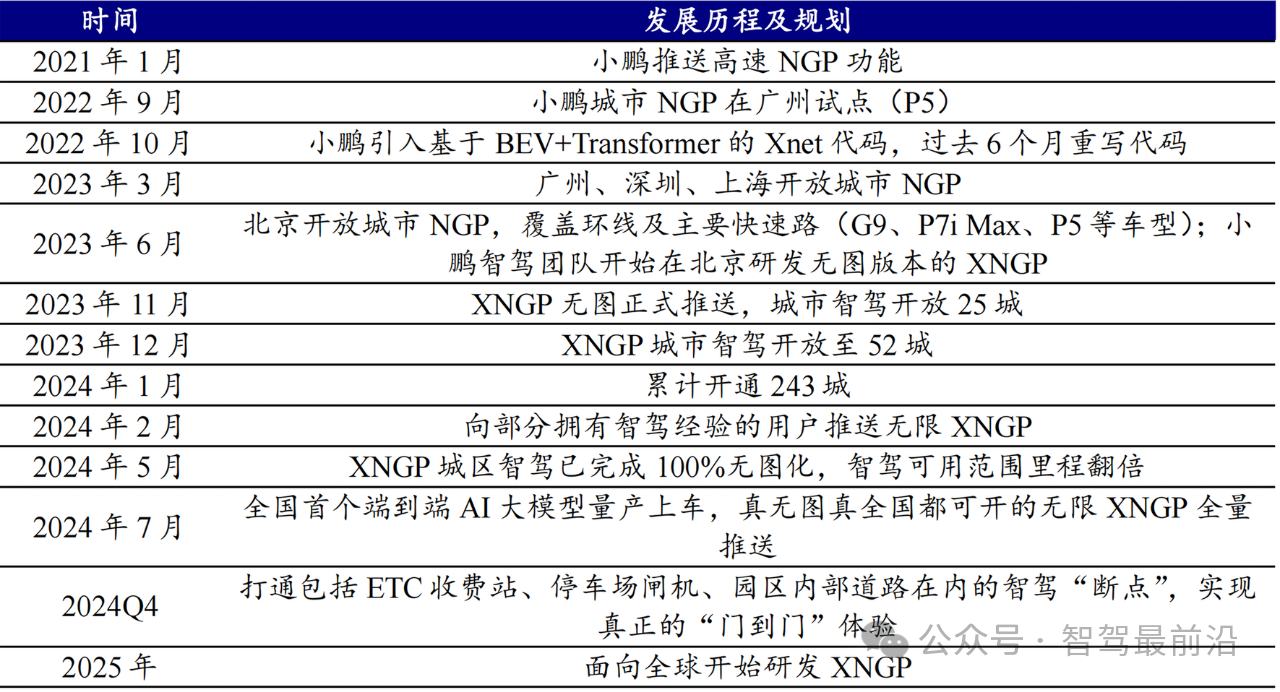
端到端技術(shù)的產(chǎn)業(yè)化應(yīng)用主要集中在領(lǐng)先的智能汽車制造商和技術(shù)公司。近年來(lái),特斯拉、小鵬、理想等企業(yè)紛紛投入到端到端技術(shù)的開發(fā)與應(yīng)用上,并已在量產(chǎn)車型中初步實(shí)現(xiàn)了端到端架構(gòu)的一部分功能。特斯拉:特斯拉在其最新的FSD(Full Self Driving)V12版本中引入了端到端架構(gòu),以簡(jiǎn)化自動(dòng)駕駛系統(tǒng)的控制路徑。FSD V12版本采用了完全端到端的神經(jīng)網(wǎng)絡(luò)模型,直接從攝像頭圖像輸入生成控制信號(hào)。這一模型的引入,使得車輛的決策速度和響應(yīng)能力大幅提升,且避免了傳統(tǒng)模塊化方案中因冗余轉(zhuǎn)換導(dǎo)致的系統(tǒng)延遲。特斯拉通過(guò)內(nèi)部測(cè)試表明,F(xiàn)SD V12具備更高的路徑規(guī)劃精確度,并已實(shí)現(xiàn)穩(wěn)定的城市道路駕駛 。小鵬汽車:小鵬的XNet系統(tǒng)基于BEV(鳥瞰圖)感知模型,結(jié)合端到端架構(gòu)設(shè)計(jì),將攝像頭輸入數(shù)據(jù)直接轉(zhuǎn)化為三維空間中的檢測(cè)結(jié)果。與傳統(tǒng)方案不同,XNet系統(tǒng)在設(shè)計(jì)時(shí)減少了大量人工規(guī)則,直接通過(guò)端到端模型完成感知和規(guī)劃任務(wù)。小鵬的端到端架構(gòu)已在多個(gè)城市的道路測(cè)試中取得了較好的表現(xiàn),且在系統(tǒng)穩(wěn)定性和復(fù)雜路況處理能力上具有顯著優(yōu)勢(shì)。
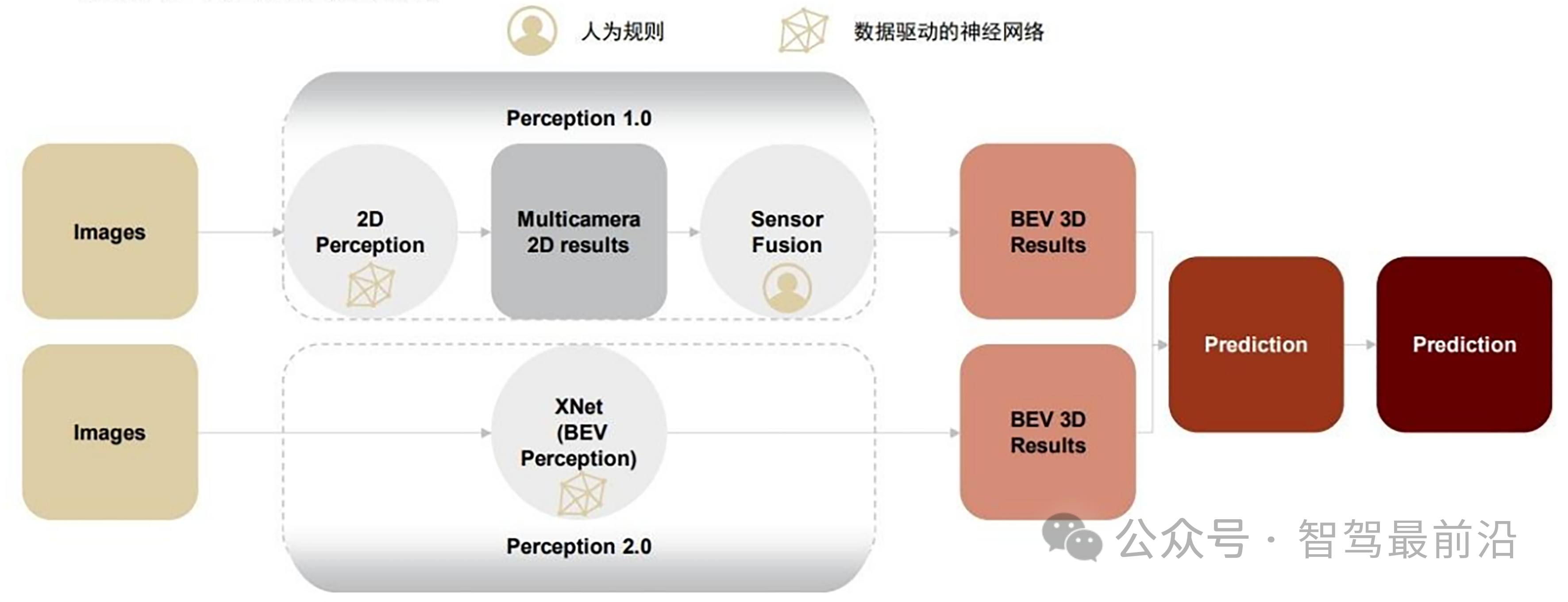
小鵬汽車端到端架構(gòu)
理想汽車:理想汽車采用了端到端架構(gòu)的增強(qiáng)版本,結(jié)合了BEV和視覺模型,實(shí)現(xiàn)了從感知到規(guī)劃的全方位控制。理想的系統(tǒng)具有“無(wú)圖駕駛”功能,能夠在沒有高精地圖的情況下通過(guò)實(shí)時(shí)攝像頭輸入生成道路規(guī)劃,適應(yīng)性較強(qiáng),能夠應(yīng)對(duì)多變的道路環(huán)境。該系統(tǒng)已在多個(gè)城市進(jìn)行了實(shí)際路測(cè),具備較高的安全性和穩(wěn)定性,展示了端到端技術(shù)在復(fù)雜環(huán)境中的可靠性 。
關(guān)鍵驅(qū)動(dòng)因素與挑戰(zhàn)
5.1 數(shù)據(jù)和算力的要求
端到端技術(shù)對(duì)數(shù)據(jù)和算力的要求非常高。端到端模型的核心是深度神經(jīng)網(wǎng)絡(luò),需要通過(guò)大量的訓(xùn)練數(shù)據(jù)來(lái)實(shí)現(xiàn)模型的泛化和精確性。對(duì)于高級(jí)自動(dòng)駕駛來(lái)說(shuō),車輛在實(shí)際路況中收集的數(shù)據(jù)必須足夠豐富,涵蓋不同的場(chǎng)景、天氣、光照等條件,以確保模型能夠在各種環(huán)境下穩(wěn)定運(yùn)行。然而,數(shù)據(jù)采集和標(biāo)注成本高昂,且數(shù)據(jù)隱私和安全問(wèn)題也需要考慮。在算力方面,端到端模型通常涉及大量的參數(shù)和多層神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),特別是當(dāng)端到端模型整合了感知、規(guī)劃和控制模塊時(shí),所需算力成倍增加。對(duì)于整車廠商來(lái)說(shuō),必須投入大量資源來(lái)構(gòu)建和維護(hù)高性能計(jì)算基礎(chǔ)設(shè)施。以特斯拉為例,其在自動(dòng)駕駛訓(xùn)練中采用了基于NVIDIA和自研芯片的高性能計(jì)算平臺(tái),以支持端到端模型的大規(guī)模訓(xùn)練。此外,云計(jì)算和邊緣計(jì)算的結(jié)合也被視為解決算力瓶頸的潛在方案,能夠?qū)崿F(xiàn)高效的實(shí)時(shí)數(shù)據(jù)處理和模型更新 。
5.2 可解釋性與安全性問(wèn)題
端到端模型的“黑箱”特性帶來(lái)了可解釋性問(wèn)題。由于端到端系統(tǒng)直接從輸入數(shù)據(jù)生成控制指令,其內(nèi)部決策路徑難以被解讀和驗(yàn)證,特別是在極端條件下,模型的行為有時(shí)會(huì)顯得不夠透明。為了確保端到端系統(tǒng)的安全性和可靠性,行業(yè)正在探索多種方法來(lái)提升模型的可解釋性。例如,部分研究通過(guò)在端到端系統(tǒng)中引入基于規(guī)則的輔助模塊,使得系統(tǒng)在關(guān)鍵決策點(diǎn)上增加更多可解釋信息。此外,通過(guò)數(shù)據(jù)分析和可視化手段展示模型的內(nèi)部特征,幫助開發(fā)人員更好地理解模型的工作原理 。
產(chǎn)業(yè)機(jī)遇與未來(lái)前景
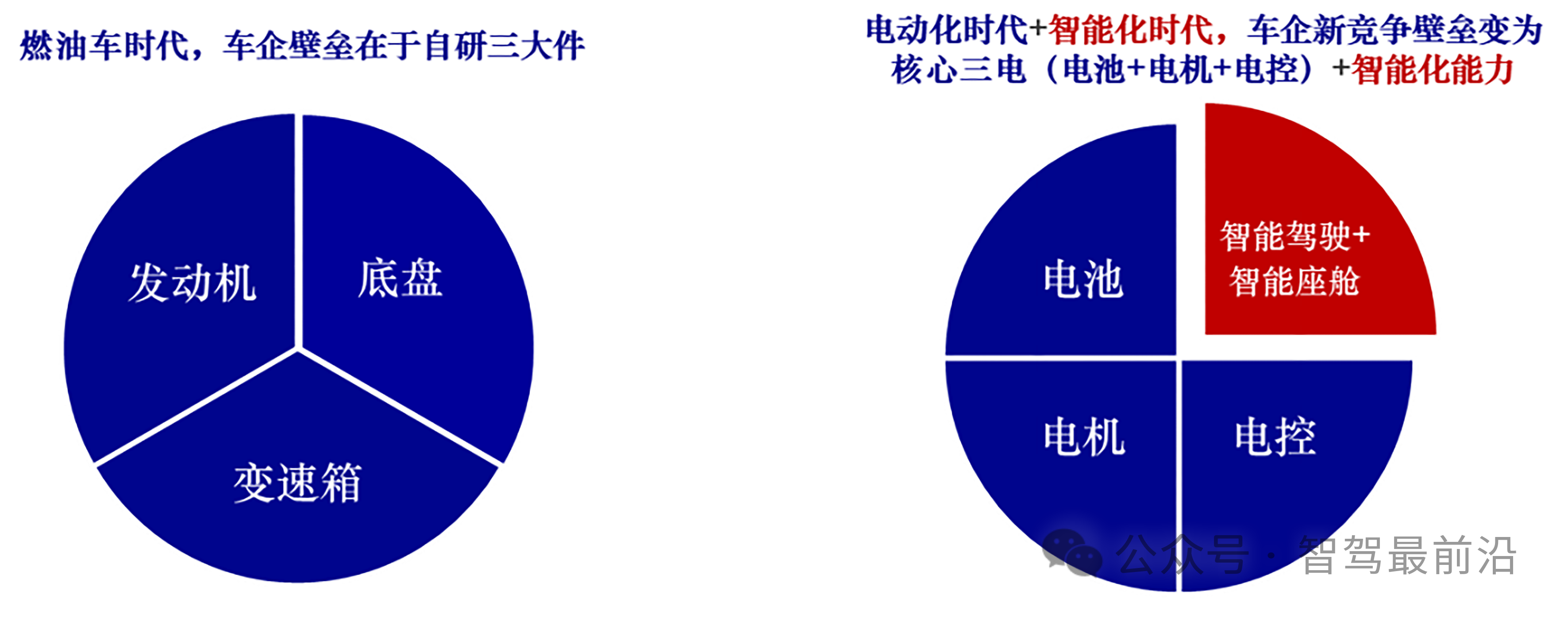
6.1 整車廠商的機(jī)遇
端到端技術(shù)為整車廠商帶來(lái)了新的機(jī)遇。隨著高級(jí)別自動(dòng)駕駛需求的提升,整車廠商不僅需要具備硬件制造能力,還需構(gòu)建自主的智能駕駛算法體系。領(lǐng)先車企如特斯拉、理想和小鵬在端到端技術(shù)的研發(fā)上投入了大量資源,并逐步構(gòu)建了各自的技術(shù)優(yōu)勢(shì)。未來(lái),端到端架構(gòu)有望成為智能汽車的主流解決方案,這不僅能夠增強(qiáng)廠商的競(jìng)爭(zhēng)力,還能夠在實(shí)際應(yīng)用中提高用戶的駕駛體驗(yàn)。例如,特斯拉通過(guò)其端到端FSD系統(tǒng)實(shí)現(xiàn)了高度自動(dòng)化的城市駕駛,極大地吸引了用戶的關(guān)注。在商業(yè)化層面,端到端技術(shù)降低了系統(tǒng)開發(fā)和維護(hù)的成本,為整車廠商實(shí)現(xiàn)智能駕駛的快速部署提供了支持。整車廠商可以通過(guò)端到端系統(tǒng)實(shí)現(xiàn)車輛的統(tǒng)一升級(jí),減少硬件變更需求,從而提高系統(tǒng)的擴(kuò)展性和靈活性。未來(lái),端到端架構(gòu)可能會(huì)成為智能汽車發(fā)展的核心技術(shù),使得整車廠商能夠在技術(shù)競(jìng)爭(zhēng)中占據(jù)主導(dǎo)地位。
6.2 零部件供應(yīng)商的角色
端到端架構(gòu)的實(shí)現(xiàn)不僅依賴整車廠商的研發(fā)投入,零部件供應(yīng)商在其中也扮演了關(guān)鍵角色。端到端技術(shù)要求E/E(電氣/電子)架構(gòu)的升級(jí),并且需要高性能計(jì)算芯片和傳感器的支持。例如,德賽西威、地平線等供應(yīng)商正在為車載計(jì)算提供更高性能的域控制器,以滿足端到端系統(tǒng)的高算力需求。同時(shí),感知層硬件供應(yīng)商如Velodyne、Luminar等也在為端到端系統(tǒng)提供先進(jìn)的傳感器解決方案。端到端系統(tǒng)對(duì)車輛的E/E架構(gòu)提出了高度一體化的要求,零部件供應(yīng)商需要提供協(xié)同度更高的硬件架構(gòu)和數(shù)據(jù)采集方案,確保系統(tǒng)在運(yùn)行過(guò)程中具備可靠的性能表現(xiàn)。隨著端到端技術(shù)在行業(yè)內(nèi)的普及,供應(yīng)鏈將面臨巨大的市場(chǎng)需求,尤其是在數(shù)據(jù)傳輸、算力芯片和傳感器等領(lǐng)域。對(duì)于供應(yīng)商而言,深度參與智能駕駛系統(tǒng)的開發(fā)能夠顯著提升其市場(chǎng)競(jìng)爭(zhēng)力,并助力端到端系統(tǒng)的全面落地 。
結(jié)論與展望
端到端技術(shù)作為自動(dòng)駕駛領(lǐng)域的重要變革,正在加速實(shí)現(xiàn)高級(jí)別自動(dòng)駕駛的愿景。相比傳統(tǒng)模塊化架構(gòu),端到端系統(tǒng)在信息傳遞效率、計(jì)算性能和系統(tǒng)簡(jiǎn)化等方面具備顯著優(yōu)勢(shì)。盡管端到端技術(shù)在數(shù)據(jù)需求、算力壓力、可解釋性和安全性等方面仍面臨挑戰(zhàn),但其全局最優(yōu)、無(wú)損傳遞的特點(diǎn)使其具備了在未來(lái)占據(jù)主導(dǎo)地位的潛力。未來(lái),隨著AI底層技術(shù)的進(jìn)一步成熟,端到端系統(tǒng)有望在智能駕駛功能的落地和普及上取得突破。整車廠商和零部件供應(yīng)商的協(xié)作將成為端到端架構(gòu)發(fā)展的重要推動(dòng)力,為智能駕駛領(lǐng)域帶來(lái)新的商業(yè)模式和市場(chǎng)機(jī)遇。同時(shí),政策法規(guī)的完善和行業(yè)標(biāo)準(zhǔn)的制定將為端到端技術(shù)的商業(yè)化保駕護(hù)航,推動(dòng)端到端系統(tǒng)的全面落地。
審核編輯 黃宇
-
AI
+關(guān)注
關(guān)注
87文章
34130瀏覽量
275229 -
端到端
+關(guān)注
關(guān)注
0文章
32瀏覽量
10678
發(fā)布評(píng)論請(qǐng)先 登錄
端到端已來(lái),智駕仿真測(cè)試該怎么做?

小米汽車端到端智駕技術(shù)介紹

從C端市場(chǎng)到B端市場(chǎng) 企業(yè)在激烈競(jìng)賽中共同推動(dòng)智能家居的加速落地

構(gòu)建端到端的流程體系
HDR Vivid端到端產(chǎn)業(yè)鏈加速構(gòu)建
實(shí)現(xiàn)自動(dòng)駕駛,唯有端到端?

端到端測(cè)試用例怎么寫
智駕進(jìn)程發(fā)力?小鵬、蔚來(lái)端到端模型上車
端到端讓智駕強(qiáng)者愈強(qiáng)時(shí)代來(lái)臨?
智己汽車“端到端”智駕方案推出,老司機(jī)真的會(huì)被取代嗎?

特斯拉帶火“端到端”智駕,國(guó)內(nèi)車企加速上車

黑芝麻智能端到端算法參考模型公布

“端到端”智駕芯片,英偉達(dá)DRIVE Thor接棒,車企自研芯片對(duì)標(biāo)行業(yè)領(lǐng)先
一文帶你厘清自動(dòng)駕駛端到端架構(gòu)差異






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論