 【CW32模塊使用】HX711稱重傳感器
【CW32模塊使用】HX711稱重傳感器
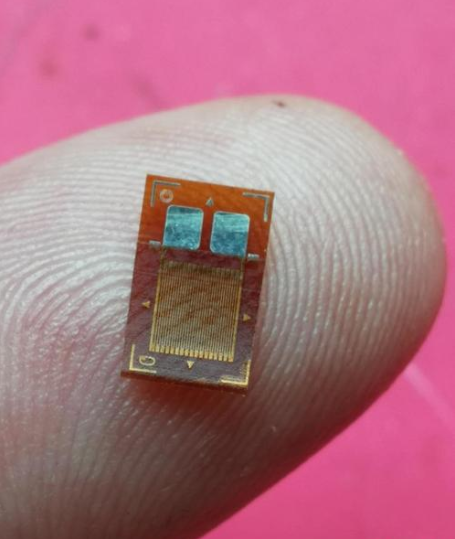
該模塊采用24位高精度的A/D轉換器芯片hx711,是一款專為高精度電子秤而設計的,具有兩路模擬通道輸入,內部集成128倍增益可編程放大器。輸入電路可配置為提供橋壓的電橋式(如壓力、稱重)傳感器模式,是一款理想的高精度、低成本采樣前端模塊。
一、模塊來源
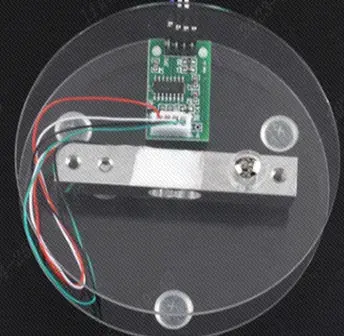
模塊實物展示:
資料下載鏈接:
https://pan.baidu.com/s/1V2NdHCmvusPDhBp00VvIvQ
密碼:j2sh
工作電壓:2.6V-5.5V
工作電流:100~1500uA
ADC精度:24位
輸出方式: 串行輸出
管腳數量:4 Pin
以上信息見廠家資料文件
三、移植過程
我們的目標是將例程移植至CW32F030C8T6開發板上【能夠判斷測量10Kg以內的稱重】。首先要獲取資料,查看數據手冊應如何實現讀取數據,再移植至我們的工程。
3.1查看資料

3.2引腳選擇
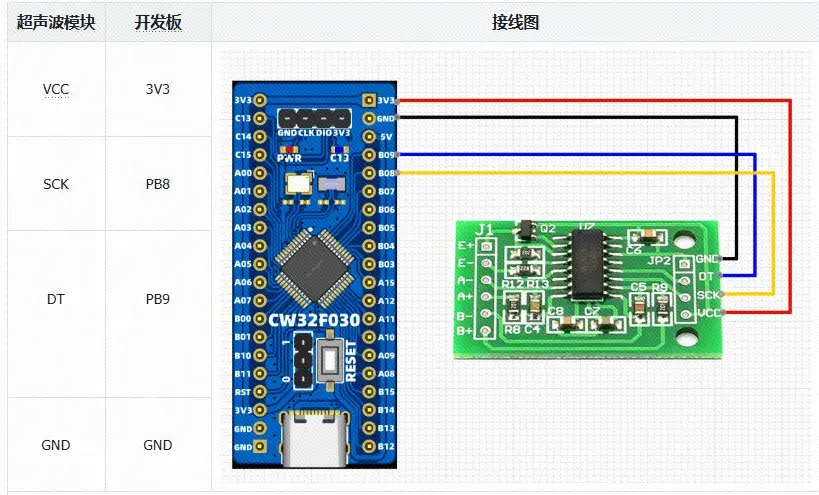
接線表
3.3移植至工程
移植步驟中的導入.c和.h文件與【CW32模塊使用】DHT11溫濕度傳感器相同,只是將.c和.h文件更改為bsp_hx711.c與bsp_hx711.h。這里不再過多講述,移植完成后面修改相關代碼。bsp_hx711
在文件bsp_hx711.c中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "bsp_hx711.h" #include "stdio.h" unsigned int HX711_Buffer; unsigned int Weight_Maopi; int Weight_Shiwu; unsigned char Flag_Error = 0; //校準參數 //因為不同的傳感器特性曲線不是很一致,因此,每一個傳感器需要矯正這里這個參數才能使測量值很準確。 //當發現測試出來的重量偏大時,增加該數值。 //如果測試出來的重量偏小時,減小改數值。 //該值可以為小數 #define GapValue 207.00 /****************************************************************** * 函 數 名 稱:HX711_GPIO_Init * 函 數 說 明:HX711的引腳初始化 * 函 數 形 參:無 * 函 數 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void HX711_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結構體 RCC_HX711_ENABLE(); // 使能GPIO時鐘 GPIO_InitStruct.Pins = GPIO_SCK|GPIO_DT; // GPIO引腳 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽輸出 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高 GPIO_Init(PORT_HX711, &GPIO_InitStruct); // 初始化 } /****************************************************************** * 函 數 名 稱:HX711_Read * 函 數 說 明:讀取HX711 * 函 數 形 參:無 * 函 數 返 回:讀取到的值 * 作 者:LC * 備 注:無 ******************************************************************/ unsigned int HX711_Read(void) //增益128 { unsigned long count; unsigned char i; DT_OUT(); delay_us(5); DT(1); delay_us(4); SCK(0); count=0; DT_IN(); delay_us(5); while(DT_GET()); for(i=0;i Weight_Maopi) { Weight_Shiwu = HX711_Buffer - Weight_Maopi; //獲取實物的AD采樣數值。 Weight = (float)Weight_Shiwu / (float)GapValue;//計算實物的實際重量 //因為不同的傳感器特性曲線不一樣,因此,每一個傳感器需要矯正這里的GapValue這個除數。 //當發現測試出來的重量偏大時,增加該數值。 //如果測試出來的重量偏小時,減小改數值。 } return Weight; }
在文件bsp_hx711.h中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #ifndef _BSP_HX711_H_ #define _BSP_HX711_H_ #include "board.h" //端口移植 #define RCC_HX711_ENABLE() __RCC_GPIOB_CLK_ENABLE() #define PORT_HX711 CW_GPIOB #define GPIO_SCK GPIO_PIN_8 #define GPIO_DT GPIO_PIN_9 //設置DT輸出模式 #define DT_OUT() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_DT; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_HX711, &GPIO_InitStruct); } //設置DT輸入模式 #define DT_IN() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_DT; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_HX711, &GPIO_InitStruct); } //獲取DT引腳的電平變化 #define DT_GET() GPIO_ReadPin(PORT_HX711, GPIO_DT) //DT與SCK輸出 #define DT(x) GPIO_WritePin(PORT_HX711,GPIO_DT, (x?GPIO_Pin_SET:GPIO_Pin_RESET)) #define SCK(x) GPIO_WritePin(PORT_HX711,GPIO_SCK,(x?GPIO_Pin_SET:GPIO_Pin_RESET)) void HX711_GPIO_Init(void); float Get_Weight(void); void Get_Maopi(void); #endif
四、移植驗證
在自己工程中的main主函數中,編寫如下。
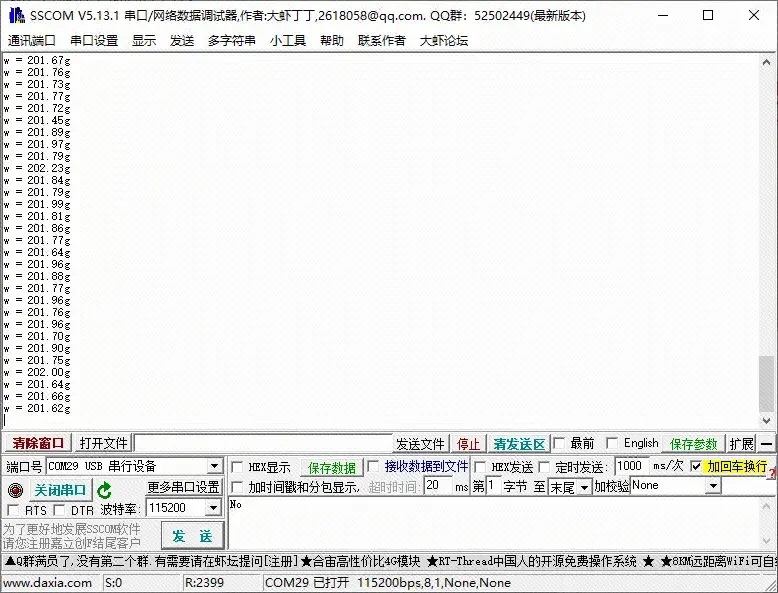
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_hx711.h" int32_t main(void) { board_init(); // 開發板初始化 uart1_init(115200); // 串口1波特率115200 HX711_GPIO_Init(); Get_Maopi(); //稱毛皮重量 delay_ms(500); Get_Maopi(); //重新獲取毛皮重量 printf("startrn"); while(1) { printf("w = %.2fgrn",Get_Weight()); delay_ms(500); } }
移植現象:往秤上放一個200g的砝碼,輸出稱重后的結果。
模塊移植成功案例代碼:
鏈接:https://pan.baidu.com/s/1Wq242kTzWVpcDTBsCRDyYg?pwd=LCKF
提取碼:LCKF
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753063 -
稱重傳感器
+關注
關注
5文章
227瀏覽量
20233 -
HX711
+關注
關注
7文章
66瀏覽量
44881 -
CW32
+關注
關注
1文章
203瀏覽量
626
發布評論請先 登錄
相關推薦
大研智造激光錫球焊錫機:微型稱重傳感器/應變片引線焊接的得力助手
稱重傳感器工作原理與應用
為什么hx711模塊在stm32F103C8T6能讀取拉力傳感器數據,在stm32F407IGHX使用時數據紊亂?
物聯網行業中的智能稱重方案介紹_稱重傳感器分析

CW32模塊使用 紅外循跡傳感器
稱重傳感器的選型及注意事項
stm8s207調試hx711稱重裝置,輸出結果一直為0的原因?


【開源獲獎案例】多功能稱重器

51單片機HX711的電子秤畢業設計(程序+仿真+原理圖+論文)
I2C接口稱重采集單元






 工商網監
工商網監
評論