") 端到端已來,智駕仿真測(cè)試該怎么做?
端到端已來,智駕仿真測(cè)試該怎么做?
一、前言
隨著智能駕駛技術(shù)的發(fā)展,端到端的解決方案被越來越多的開發(fā)者提及,各大汽車企業(yè)爭(zhēng)先恐后將端到端智駕方案部署到量產(chǎn)新車型上。過去,智能駕駛方案一直是按照感知、決策、規(guī)劃、控制這類規(guī)則驅(qū)動(dòng)(rule-based)的模塊化方法推進(jìn),然而規(guī)則驅(qū)動(dòng)的模塊化方案存在“規(guī)則難以窮舉、ODD邊界模糊、擴(kuò)展與維護(hù)升級(jí)困難”等局限性。因此端到端的學(xué)習(xí)驅(qū)動(dòng)(learning-based)方案應(yīng)運(yùn)而生。
端到端的方案具有很多顯而易見的優(yōu)勢(shì),首先,它具備較強(qiáng)的泛化能力,可以通過數(shù)據(jù)發(fā)現(xiàn)潛在規(guī)律,適應(yīng)多樣化和復(fù)雜場(chǎng)景;其次,端到端可實(shí)現(xiàn)全面優(yōu)化,學(xué)習(xí)驅(qū)動(dòng)直接將輸入(如傳感器數(shù)據(jù))映射到輸出(如車輛控制指令),避免了模塊化方案中的中間過程(如感知、決策和控制分離)可能導(dǎo)致的信息丟失或誤差累積;此外,端到端可持續(xù)學(xué)習(xí)和升級(jí),模型可以通過在線學(xué)習(xí)或周期性訓(xùn)練,不斷吸收新數(shù)據(jù),從而適應(yīng)動(dòng)態(tài)變化的環(huán)境需求,如更新的道路法規(guī)、復(fù)雜的新場(chǎng)景等。
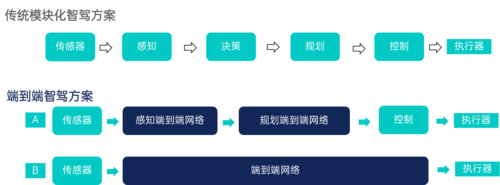 圖 1 自動(dòng)駕駛傳統(tǒng)模塊化方案與端到端方案
圖 1 自動(dòng)駕駛傳統(tǒng)模塊化方案與端到端方案可見,端到端智駕方案優(yōu)勢(shì)非常明顯,但是對(duì)于仿真測(cè)試來說卻是“災(zāi)難性的挑戰(zhàn)”。過去模塊化智駕方案中,感知與規(guī)控之間有顯性接口。無論是SIL仿真還是HIL仿真,可以輕松繞過感知模塊,直接對(duì)規(guī)控進(jìn)行仿真測(cè)試(即使輸入合成的低置信度圖像或點(diǎn)云,也不對(duì)感知進(jìn)行評(píng)測(cè))。而端到端方案的到來,不再有所謂感知與規(guī)控接口,原有SIL或HIL仿真方案需要重構(gòu)。面向端到端的智駕仿真必須從傳感器輸出數(shù)據(jù)切入,提供一種置信度高、一致性好、覆蓋率全面、故障注入便捷的全鏈路閉環(huán)仿真方案。
我們探索了一種有效的端到端智駕仿真解決方案,在仿真引擎和數(shù)據(jù)傳輸上進(jìn)行了大幅優(yōu)化,以應(yīng)對(duì)端到端帶來的挑戰(zhàn),整體框架如圖2所示。本方案充分利用了智能駕駛的中間件技術(shù),將仿真引擎生成的傳感器原始數(shù)據(jù)(部分為結(jié)構(gòu)化數(shù)據(jù))直接傳遞給智駕應(yīng)用層,繞過了傳感器硬件和驅(qū)動(dòng),縮短了仿真數(shù)據(jù)傳輸鏈路,規(guī)避了仿真系統(tǒng)開發(fā)過程帶來的復(fù)雜適配與調(diào)試工作。大大縮短開發(fā)周期的同時(shí),還顯著降低了整個(gè)仿真系統(tǒng)的成本。
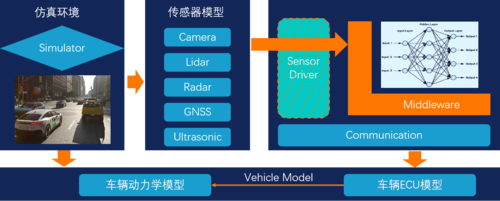 圖 2 基于軟件定義接口和中間件的閉環(huán)測(cè)試
圖 2 基于軟件定義接口和中間件的閉環(huán)測(cè)試二、XIL架構(gòu)仿真
方案核心架構(gòu)基于aiSim仿真器,采用XIL架構(gòu),并提供開放靈活的API接口,滿足不同仿真測(cè)試需求。無論是傳感器模型、車輛動(dòng)力學(xué),還是場(chǎng)景構(gòu)建,都有對(duì)應(yīng)的功能模組來實(shí)現(xiàn)。
 圖 3 aiSim XIL架構(gòu)示意圖
圖 3 aiSim XIL架構(gòu)示意圖aiSim Air引擎支持如Raster、Raytrace等多種渲染方案,并兼容3DGS/NeRF等技術(shù),能夠在平衡渲染效率和置信度的同時(shí),優(yōu)化資源占用和數(shù)據(jù)傳輸效率。此外作為通過ISO 26262 ASIL D認(rèn)證的仿真工具,aiSim能夠在不同傳感器和天氣條件下提供完全的確定性和一致性。
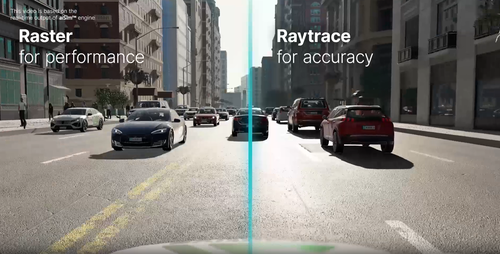 圖 4 Raster和Raytrace渲染支持
圖 4 Raster和Raytrace渲染支持 圖 5 兼容三維重建場(chǎng)景
圖 5 兼容三維重建場(chǎng)景三、靈活先進(jìn)的場(chǎng)景構(gòu)建方案
此外,我們采用了多種先進(jìn)的場(chǎng)景構(gòu)建方案,極大地增強(qiáng)了測(cè)試的靈活性和廣度。交互式圖形化場(chǎng)景編輯工具支持OpenScenario和aiSim自定義的AimScenario兩種場(chǎng)景格式,能夠逐幀回放編輯過程。
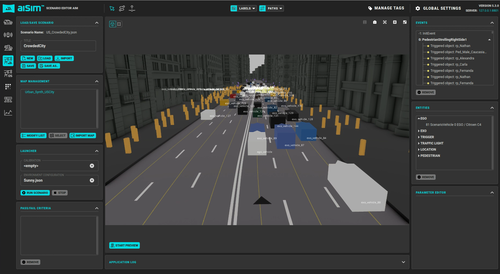 圖 6 圖形化場(chǎng)景編輯工具
圖 6 圖形化場(chǎng)景編輯工具高斯?jié)姙R渲染器(GGSR)則可以在3D重建場(chǎng)景中動(dòng)態(tài)插入物體,優(yōu)化環(huán)境條件,減少偽影,修復(fù)鏡頭下的非一致性問題。
 圖 7 非一致性修正
圖 7 非一致性修正 圖 8 三維重建場(chǎng)景天氣環(huán)境編輯
圖 8 三維重建場(chǎng)景天氣環(huán)境編輯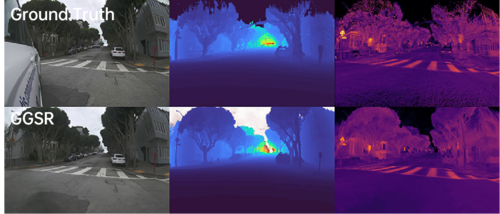 圖 9 任意視角下多模態(tài)效果圖
圖 9 任意視角下多模態(tài)效果圖LogSim2WorldSim進(jìn)一步通過云端自動(dòng)化處理和分析原始數(shù)據(jù),實(shí)現(xiàn)了基于EuroNCAP等法規(guī)場(chǎng)景的切片、預(yù)測(cè)試和回放功能。
 圖 10 LogSim2WorldSim方案轉(zhuǎn)換流程
圖 10 LogSim2WorldSim方案轉(zhuǎn)換流程在完成場(chǎng)景構(gòu)建后,通過VRU、建筑物、道路標(biāo)志和天氣等動(dòng)靜態(tài)元素,對(duì)場(chǎng)景的邊緣條件進(jìn)行探索,確保端到端測(cè)試全面覆蓋。
 圖 11 場(chǎng)景泛化方案
圖 11 場(chǎng)景泛化方案四、高保真物理傳感器模型
在傳感器仿真方面,通過物理級(jí)相機(jī)、激光雷達(dá)和毫米波雷達(dá)模型等豐富模型庫的支持,可以實(shí)現(xiàn)快速配置和參數(shù)調(diào)整。此外通過精準(zhǔn)仿真HDR、高動(dòng)態(tài)范圍、動(dòng)態(tài)模糊、曝光等不同的視覺效應(yīng),能夠確保各種駕駛環(huán)境和天氣條件下的高保真度測(cè)試。
 圖 12 相機(jī)模型鏡頭效應(yīng)
圖 12 相機(jī)模型鏡頭效應(yīng) 圖 13 鏡頭不同曝光次數(shù)下HDR圖像
圖 13 鏡頭不同曝光次數(shù)下HDR圖像 圖 14 不同天氣條件下鏡頭效果
圖 14 不同天氣條件下鏡頭效果激光雷達(dá)和毫米波雷達(dá)模型也能有效模擬不同天氣條件下的傳感器行為,為高效的多目標(biāo)檢測(cè)和車道線檢測(cè)任務(wù)提供可靠數(shù)據(jù)支持。
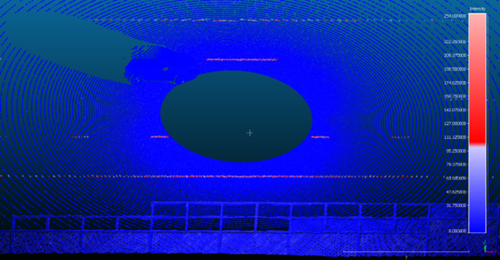 圖 15 激光雷達(dá)BRDF材質(zhì)反射
圖 15 激光雷達(dá)BRDF材質(zhì)反射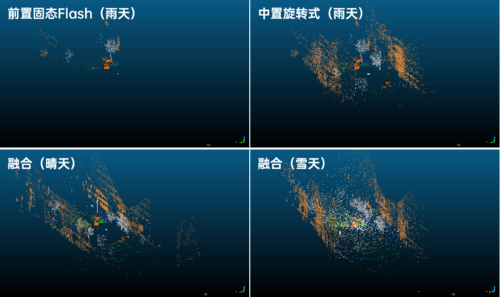 圖 16 雨雪天氣激光雷達(dá)點(diǎn)云輸出效應(yīng)
圖 16 雨雪天氣激光雷達(dá)點(diǎn)云輸出效應(yīng)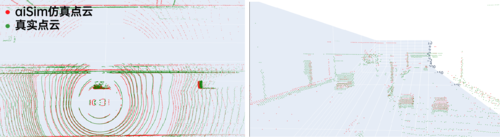 圖 17 激光雷達(dá)點(diǎn)云置信度驗(yàn)證
圖 17 激光雷達(dá)點(diǎn)云置信度驗(yàn)證 圖 18 毫米波雷達(dá)點(diǎn)云
圖 18 毫米波雷達(dá)點(diǎn)云五、置信度與仿真結(jié)果分析
我們還對(duì)采用此方案的仿真結(jié)果進(jìn)行了詳細(xì)的驗(yàn)證。例如,在車道線檢測(cè)任務(wù)中,aiSim仿真與真實(shí)世界數(shù)據(jù)之間的召回率一致,達(dá)到了98.45%的高準(zhǔn)確率。多個(gè)目標(biāo)檢測(cè)任務(wù)的測(cè)試結(jié)果也表明,仿真與實(shí)際表現(xiàn)高度契合,尤其在近距離目標(biāo)的檢測(cè)中,召回率表現(xiàn)優(yōu)異。
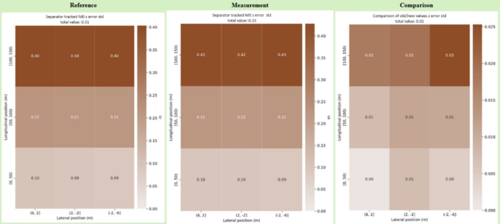 圖 19 置信度測(cè)試1:車道線檢測(cè)算法
圖 19 置信度測(cè)試1:車道線檢測(cè)算法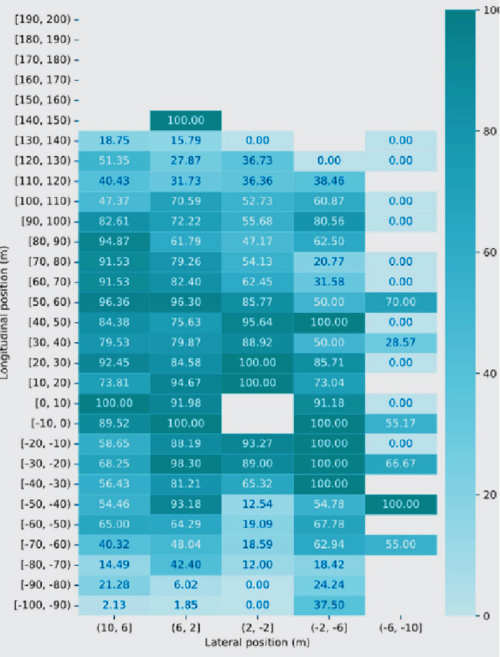 圖 20 置信度測(cè)試2:多目標(biāo)檢測(cè)
圖 20 置信度測(cè)試2:多目標(biāo)檢測(cè)端到端智駕仿真方案還在多個(gè)測(cè)試環(huán)境中展現(xiàn)了出色的表現(xiàn),包括實(shí)車靜態(tài)和動(dòng)態(tài)測(cè)試、車輛模型與動(dòng)力學(xué)模型的集成,支持FMU接口快速接入第三方動(dòng)力學(xué)模型。
 圖 21 動(dòng)力學(xué)測(cè)量和建模
圖 21 動(dòng)力學(xué)測(cè)量和建模每次仿真結(jié)束后,系統(tǒng)會(huì)自動(dòng)生成SQLite數(shù)據(jù)庫文件,方便進(jìn)行深入的分析和數(shù)據(jù)挖掘,確保測(cè)試結(jié)果的全面性和準(zhǔn)確性。
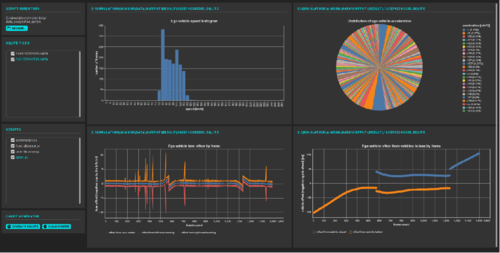 圖 22 測(cè)試結(jié)果可視化分析
圖 22 測(cè)試結(jié)果可視化分析六、應(yīng)用案例分享
隨著自動(dòng)駕駛測(cè)試需求的日益復(fù)雜,基于aiSim為核心的端到端仿真方案憑借其易于擴(kuò)展的特性,可以支持SiL/HiL等多種應(yīng)用場(chǎng)景,并提供了與ROS2、Simulink、Matlab等系統(tǒng)的無縫集成。
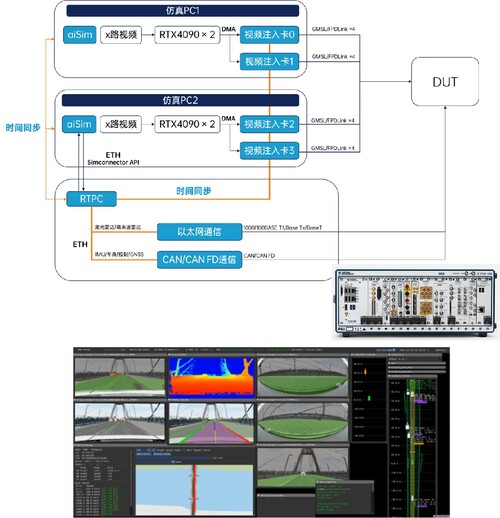 圖 23 基于DMA視頻注入閉環(huán)測(cè)試方案及監(jiān)測(cè)窗口
圖 23 基于DMA視頻注入閉環(huán)測(cè)試方案及監(jiān)測(cè)窗口我們還嘗試探索了專為GNSS集成域控制器、決策功能快速測(cè)試等場(chǎng)景的測(cè)試方案,進(jìn)一步提高了測(cè)試效率,降低了硬件成本。
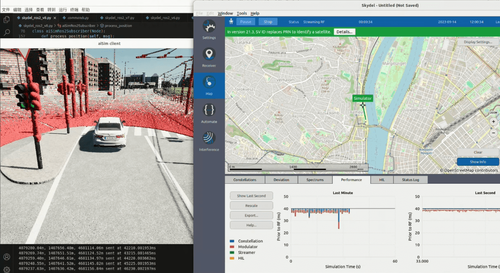 圖 24 GNSS聯(lián)合仿真方案
圖 24 GNSS聯(lián)合仿真方案七、結(jié)語
本次介紹的端到端智駕仿真測(cè)試方案,以aiSim引擎和XIL架構(gòu)為核心支撐,憑借其開放的接口設(shè)計(jì)、靈活的場(chǎng)景構(gòu)建與測(cè)試功能,為自動(dòng)駕駛技術(shù)的驗(yàn)證與優(yōu)化提供了強(qiáng)有力的支持。無論客戶面臨的是提升測(cè)試效率的迫切需求,還是降低成本的現(xiàn)實(shí)壓力,端到端智駕仿真測(cè)試方案都能幫助客戶輕松應(yīng)對(duì)自動(dòng)駕駛測(cè)試中的種種復(fù)雜挑戰(zhàn),實(shí)現(xiàn)技術(shù)難題的快速解決。
-
汽車電子
+關(guān)注
關(guān)注
3026文章
7941瀏覽量
166900 -
仿真
+關(guān)注
關(guān)注
50文章
4070瀏覽量
133552 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2505瀏覽量
48736 -
自動(dòng)駕駛技術(shù)
+關(guān)注
關(guān)注
4文章
96瀏覽量
14997
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
是德科技發(fā)布端到端PCIe5.0/6.0測(cè)試解決方案

紫光展銳攜手產(chǎn)業(yè)合作伙伴完成RedCap端到端能力測(cè)試
小鵬汽車發(fā)布端到端大模型
端到端測(cè)試不正常如何處理
端到端測(cè)試用例怎么寫
智駕進(jìn)程發(fā)力?小鵬、蔚來端到端模型上車
端到端讓智駕強(qiáng)者愈強(qiáng)時(shí)代來臨?
智己汽車“端到端”智駕方案推出,老司機(jī)真的會(huì)被取代嗎?

爆火的端到端如何加速智駕落地?

特斯拉帶火“端到端”智駕,國內(nèi)車企加速上車

黑芝麻智能端到端算法參考模型公布






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論