


永磁同步電機因其高效能、高功率密度和良好的控制特性,在現(xiàn)代工業(yè)和消費(如新能源電動汽車)中被廣泛使用。在永磁同步電機中,位置傳感器可以實時提供轉(zhuǎn)子位置反饋,使得電機控制可以更加精確和高效,然而位置傳感器的使用也同時增加了系統(tǒng)的成本和復(fù)雜度。設(shè)計與開發(fā)無位置傳感器的電機機控制方法(無感控制)已經(jīng)成為一種趨勢!在 MathWorks 贊助的今年第十九屆研究生電子設(shè)計競賽中,來自上海工程技術(shù)大學(xué)的高英杰、王育潔和吳琪歡三位同學(xué)所組成的未來使者團隊,設(shè)計與開發(fā)了一種基于混合觀測器的內(nèi)置式永磁同步電動機(IPMSM)全速域無感控制策略,解決了“零低速域平穩(wěn)啟動”及“順滑過渡到中高速域”的問題,有效地提高了IPMSM的性能和可靠性。他們使用 MATLAB 和 Simulink 構(gòu)建仿真模型、半實物仿真平臺和原理樣機,驗證了所提出的控制策略。 未來使者團隊合影 未來使者團隊同時獲得了全國技術(shù)賽三等獎和 MathWorks 企業(yè)專項獎的二等獎。他們使用MATLAB和Simulink提高了設(shè)計與開發(fā)效率,節(jié)約了時間和成本。以下是未來使者的分享:
概述
綠色低碳發(fā)展已經(jīng)成為全球發(fā)展潮流,對作為新能源汽車動力系統(tǒng)核心部件主驅(qū)電機的關(guān)鍵性能參數(shù)與經(jīng)濟參數(shù)提出了更高要求。國內(nèi)外對于永磁同步電機的無位置傳感器算法已有較多深入研究,根據(jù)速域可將研究成果分為兩類——零低速域與中高速域。
在零低速域,大部分利用電機內(nèi)部凸極性獲得轉(zhuǎn)子位置信息,目前常用的注入高頻信號主要包括旋轉(zhuǎn)高頻電壓信號、脈振高頻電壓信號、載波頻率成分分析法等。
在中高速域,IPMSM 可依據(jù)反電動勢方法衍生出滑膜觀測器、擴展卡爾曼濾波器法、參考自適應(yīng)法等。
盡管現(xiàn)有的混合控制算法通過融合轉(zhuǎn)子位置信息已取得了階段性成果,但仍面臨一些挑戰(zhàn)。因此,我們提出了一種基于高頻注入與高階滑膜觀測器的永磁同步電機全速域無位置傳感器控制策略。通過這一策略,解決了“零低速域平穩(wěn)啟動”及“順滑過渡到中高速域”的問題,從而有效地提高了電機控制的性能和可靠性。算法結(jié)構(gòu)設(shè)計目前已有學(xué)者提出了在電機低速運行時采用高頻脈振注入法,和中高速運行時采用高階滑膜觀測器法,并基于余弦切換的融合控制算法。但由于余弦函數(shù)的固有性質(zhì),運行中會引起輸出角度的小范圍但劇烈的抖動,這種抖動會導(dǎo)致電機在切換過程中產(chǎn)生不平滑的運行和異響。我們提出了一種新型融合策略——利用高階函數(shù)設(shè)計一種切換比例系數(shù)連續(xù)光滑的切換方法。
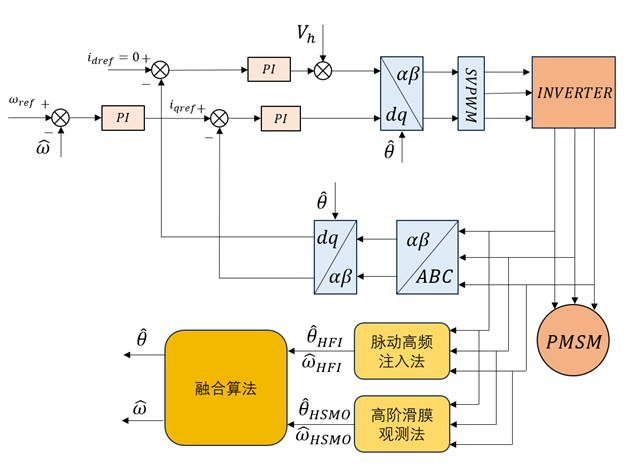
全速域混合觀測器結(jié)構(gòu)框圖 算法的亮點主要包含以下幾個方面:
由于電機在低速域運行時,使用低通濾波器求解轉(zhuǎn)子角度信息會導(dǎo)致相移,并且高頻信號的注入會使轉(zhuǎn)子電角頻率產(chǎn)生紋波。針對以上問題,我們通過改進脈振高頻方波信號的注入方法,向 q ? 軸注入高頻方波信號,從d ? 軸提取轉(zhuǎn)子位置信息與電角頻率,并將 q ? 軸電流導(dǎo)數(shù)計算改為差分信號,從而避免了低通濾波器的使用,增強系統(tǒng)帶寬,保證電機在零速工作狀態(tài)下?lián)Q向時,觀測器處于收斂狀態(tài)。
利用雙二階廣義積分器(DSOGI)系統(tǒng)替代帶通濾波器提取高頻電壓信號,鎖定并輸出高頻階段電機角頻率,提高系統(tǒng)動態(tài)性能,防止電機啟動時發(fā)生抖動。與傳統(tǒng)方法相比,系統(tǒng)在調(diào)節(jié)參數(shù)時更加簡便。
將脈振高頻方波注入法與反電動勢模型法相結(jié)合,采用以高階函數(shù)為背景的全速域融合策略。在切換觀測器時,本算法將轉(zhuǎn)子位置信息與角頻率信號使用系數(shù)方法進行融合,保證電機在切換階段順利過渡,從而實現(xiàn)全速域無位置傳感器控制。
仿真模型與結(jié)果我們使用 MATLAB/Simulink 搭建三相電機仿真模型,對系統(tǒng)工作原理和控制策略進行了仿真驗證。
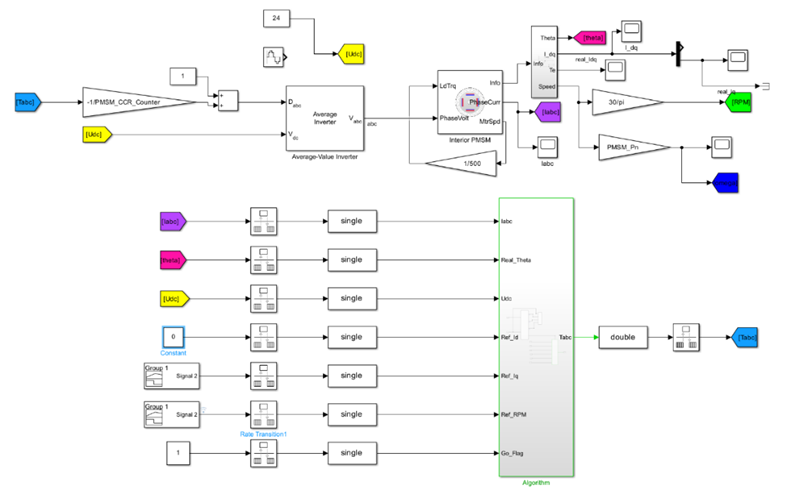
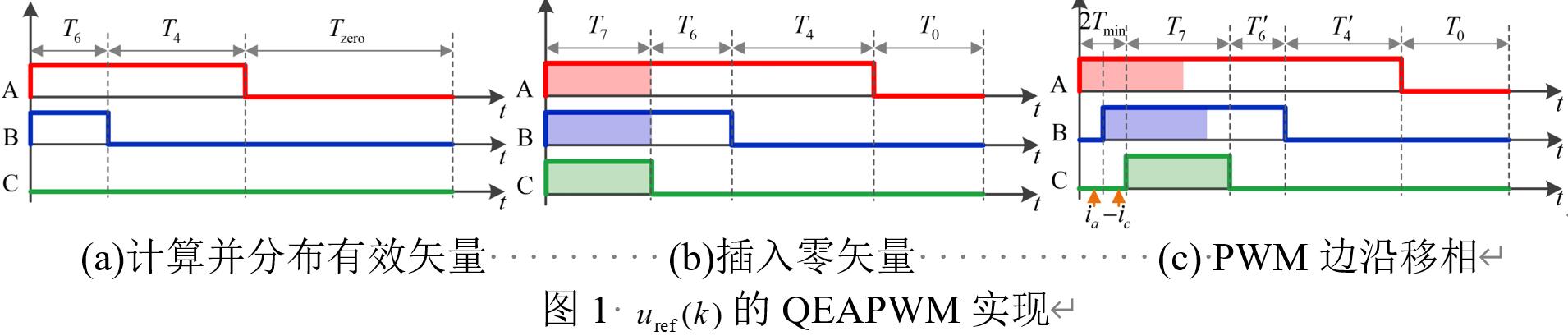
三相電機離散仿真模型 其中綠色邊框的算法模塊主要包含以下四個部分: 高頻注入模塊在電機啟動至低速時啟用,算法使用高頻注入觀測器產(chǎn)生的角頻率作為輸入角度,并且角頻率經(jīng)過 DSOGI 模塊,能夠達到去除大部分紋波的作用。 當(dāng)達到切換閾值后,算法采用高階函數(shù)進行平滑切換,Park 變換所采取的角度也切換成高階滑膜算法。 速度環(huán)采用 LADRC 控制器,通過使用高頻注入方法,觀測器很快能夠輸出觀測的轉(zhuǎn)子位置,同時通過PLL鎖相環(huán)能夠輸出觀測速度。將參考速度與觀測速度送入 LADRC 速度控制器,輸出參考電流指令。 反 Park 變換和 SVPWM 生成模塊:電流環(huán)輸出的指令送入反 Park 變換模塊,計算后的 uα,uβ 傳入 SVPWM 生成模塊,生成三相驅(qū)動信號。在實際代碼中將其寫入 TIMER0 的 CCR 寄存器。
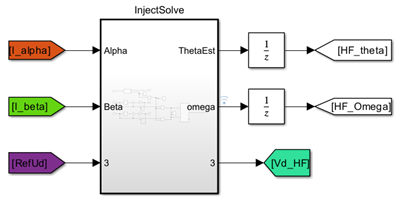
觀測器模型(a)高頻方波注入模塊
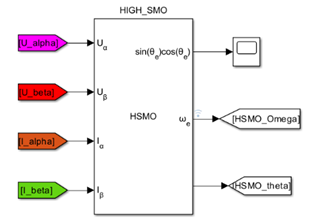
觀測器模型(b)高階滑膜注入模塊
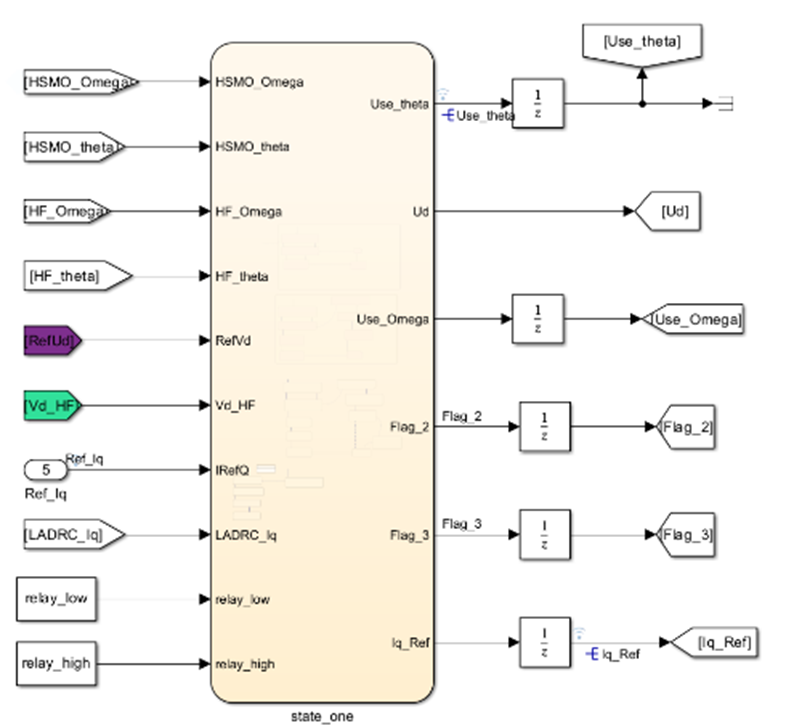
狀態(tài)機控制模型 在 Simulink 模型中,我們利用 Stateflow 建立了升速與降速的狀態(tài)機控制模塊。每個狀態(tài)機中包含 4 個狀態(tài);箭頭表示狀態(tài)之間的轉(zhuǎn)移;箭頭上可以設(shè)置一些邏輯判斷,用于表示狀態(tài)之間轉(zhuǎn)移的條件。當(dāng)轉(zhuǎn)移條件滿足時,狀態(tài)會發(fā)生轉(zhuǎn)移,從而使仿真正常運轉(zhuǎn),從而輸出所需的電流、電壓、速度與角度等。 要注意的是:無論是輸入變量、中間變量還是是輸出變量,數(shù)據(jù)類型和取值范圍需要嚴(yán)格把控,以防止出現(xiàn)變量類型不兼容或者變量值溢出等錯誤。Stateflow 建模使得我們可以清晰地在畫布中看到當(dāng)下算法執(zhí)行到哪一個狀態(tài),這為我們調(diào)試程序提供方便。另外,Stateflow 使我們可以保留某個變量在仿真內(nèi)的最后狀態(tài),方便之后的調(diào)用。若運行仿真后,轉(zhuǎn)子角度觀測準(zhǔn)確,電機運行穩(wěn)定則驗證算法收斂,我們可以進行對模型自動生成代碼的操作。具體是在算法模塊下點擊右鍵,選中“C/C++ 代碼->編譯此子系統(tǒng)”,等待Simulink 自動生成算法 C 代碼。將所生成的 .c 與 .h 文件移植進搭建好的底層代碼中進行編譯:
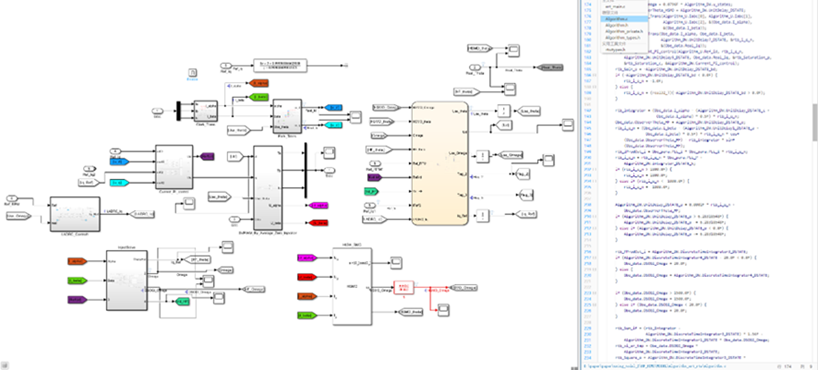
代碼生成布局 我們還使用 Simulink 搭建上位機環(huán)境。Simulink 的上位機不僅具有簡單、高效、波形觀察清晰等特點,還使得我們可以將輸出數(shù)據(jù)直接保存為 .mat 格式,方便后續(xù)利用 MATLAB 代碼進行分析。
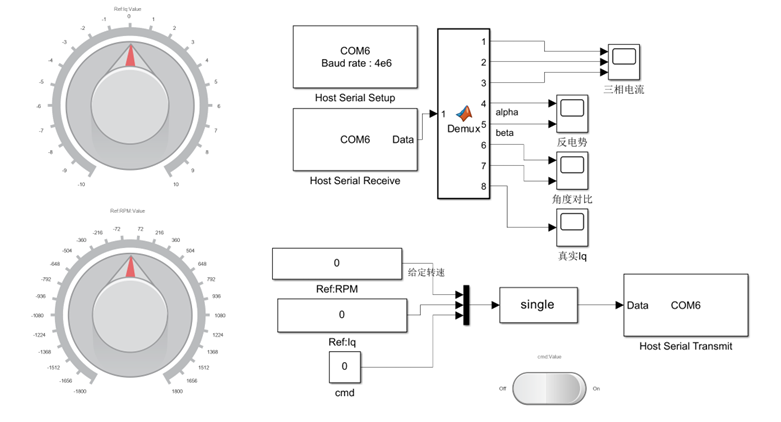
上位機模型 仿真實驗的部分結(jié)果如下所示。
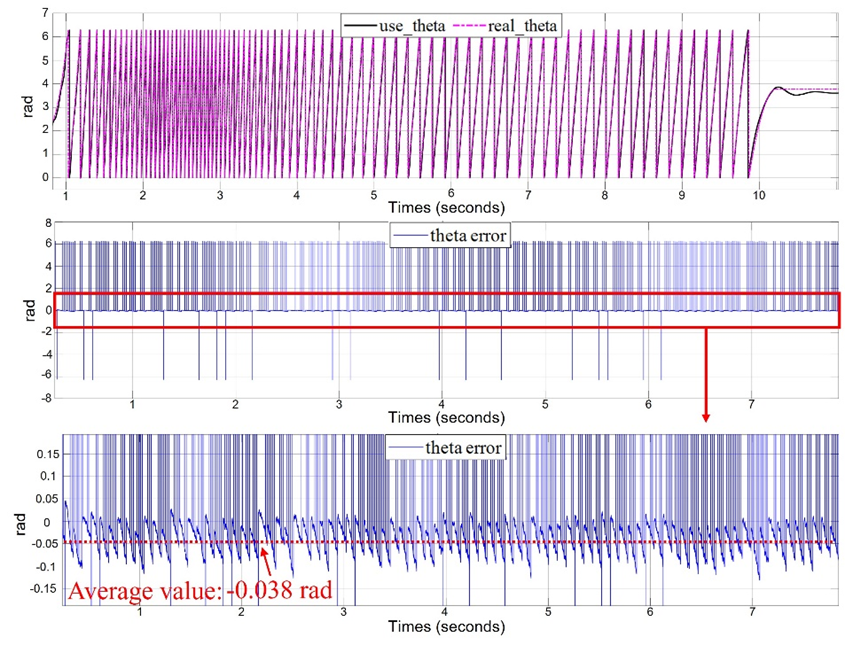
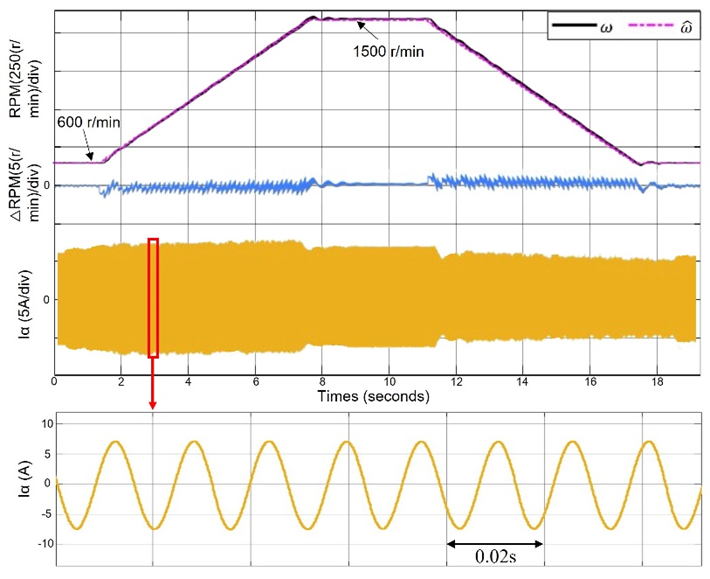
斜坡轉(zhuǎn)速追蹤實驗(600-1500-600r/min)實驗平臺與結(jié)果完成仿真實驗和代碼生成之后,我們將代碼部署到0.2kW IPMSM矢量控制系統(tǒng)中,對無位置傳感器混合算法進行驗證,并使用電機對拖的方式進行負載測試。
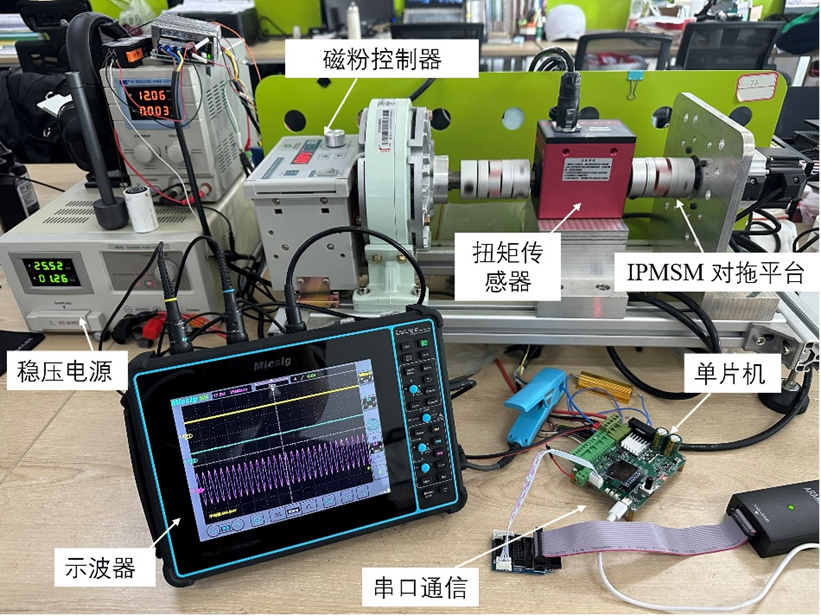
測試臺架
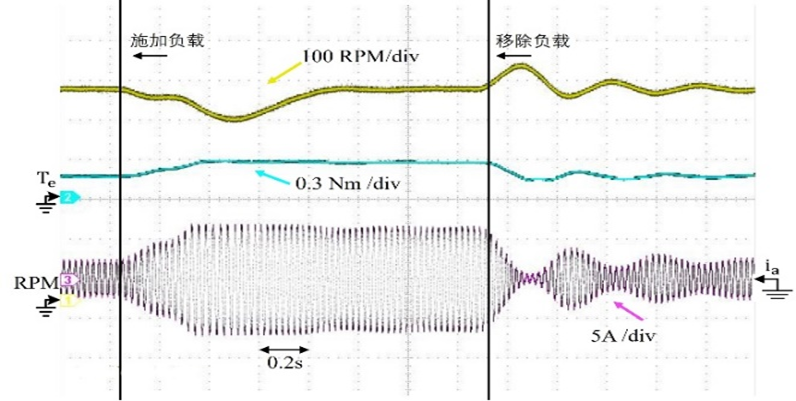
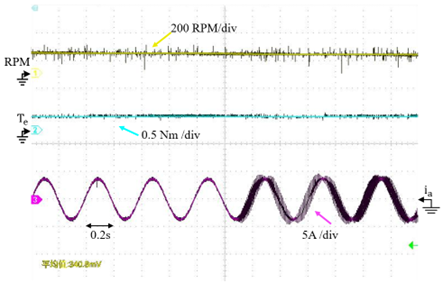
負載擾動實驗結(jié)果
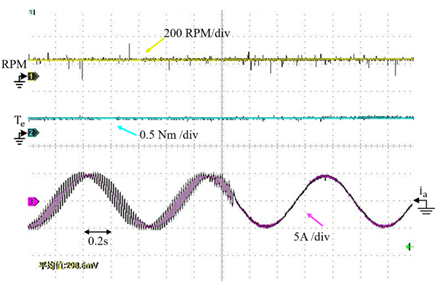
觀測器切換實驗結(jié)果(a)
觀測器切換實驗結(jié)果(b)總結(jié)我們在研電賽作品中對傳統(tǒng)混合觀測器進行改進,設(shè)計了一種新型控制策略,為全速域無傳感器電機控制提供了新思路,并通過使用 MATLAB 和 Simulink 構(gòu)建仿真模型、半實物仿真平臺和原理樣機,驗證了所提出的控制策略。使用 MATLAB 和 Simulink,我們可以在不利用硬件電路的情況下,通過仿真實驗來驗證控制策略;并基于 Simulink 的代碼生成功能自動將模型轉(zhuǎn)化成 C/C++ 代碼部署到硬件。總之,MATLAB 和 Simulink 有效地幫助我們提高了團隊的開發(fā)效率,節(jié)省了時間和成本!
-
matlab
+關(guān)注
關(guān)注
189文章
3000瀏覽量
233922 -
永磁同步電機
+關(guān)注
關(guān)注
28文章
878瀏覽量
50590 -
Simulink
+關(guān)注
關(guān)注
22文章
542瀏覽量
63962
原文標(biāo)題:強強對話 | 永磁同步電機全速域無感控制策略
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于GD32F407VET6主控芯片的永磁同步電機控制器設(shè)計
永磁同步電機全速域矢量控制的全過程介紹

工程碩士論文——基于FOC的永磁同步電機全速域無位置傳感器控制策略
永磁同步電機矢量控制策略分析
永磁同步電機無感控制
永磁同步電機全速域控制指南






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論