

交通電氣化正在改變車輛的設計、測試和制造方式。控制器硬件在環(C-HIL),也被稱為信號-HIL,已成為測試電力電子控制固件的一種替代方法,它提供了易用性、通過自動化實現的廣泛測試覆蓋率,以及與包含功率流的測試方法(如功率-HIL設置)相比相對較低的成本。
隨著電動汽車的普及,固定充電器和車載充電器(OBC)在行業中受到越來越多的關注,這為未來電動出行帶來了關鍵挑戰。為了支持使用C-HIL開發和測試先進的電動汽車充電器控制,必須以高保真度實時模擬這些應用中典型的高開關頻率電源轉換器。本文概述了使這一切以準確、安全和成本效益的方式成為可能的挑戰和關鍵解決方案。

電力電子電路的實時仿真通常在基于FPGA的仿真器上執行。在設計這類基于FPGA的平臺時,需要考慮三個關鍵方面:
開關模型復雜性:半導體開關模型可以以不同的保真度進行仿真,從用于硬件設計的高詳細瞬態模型,到理想開關模型,甚至是用等效電源替代開關的平均轉換器模型。
可實現的時間步長:根據開關模型的復雜性,模擬所有感興趣動態所需的時間步長也不同。對瞬態模型中寄生效應的高度詳細仿真可能需要皮秒級的分辨率,而平均轉換器模型可以以每個開關周期一個仿真步長進行仿真。
易用性:通過手動編碼和優化所需轉換器的方程在VHDL中可以實現最大性能。但是,修改這樣的優化模型會非常耗時且具有挑戰性。相比之下,更通用的仿真方法可能缺乏實現所需短時間步長的優化。
開發有效的HIL仿真器平臺的主要挑戰在于平衡這三者的需求。Typhoon HIL平臺專門為了電力電子應用而設計,通過以下設計選擇實現:
圖形原理圖編輯器:使用圖形原理圖編輯器設計電路。不生成VHDL代碼,也不涉及綜合、比特流生成等,而是使用可配置的FPGA求解器。模型通過單擊編譯過程加載到求解器中,通常在一分鐘內完成。
理想開關模型:與高度詳細的開關模型不同,理想開關模型不需要亞納秒級的時間步長來模擬開關換相。然而,它仍然能夠以高保真度模擬電力電子轉換器以進行控制設計和測試。使用不同的狀態空間矩陣集來模擬對應于不同開關狀態組合的電路。這意味著可以通過兩個連續的時間步長和兩個不同的矩陣集來模擬一個換相事件。理想開關模型還可以通過添加正向壓降輕松增強。
GDS過采樣:HIL仿真器數字輸入的門驅動信號(GDS)以比仿真時間步長更快的速度采樣。由于控制器時鐘與模擬器未同步,門控信號的邊緣發生在仿真時間步長的持續時間內。該邊緣(換相事件)被時間戳,并將信息用于補償接下來時間步的仿真結果,從而提高換相事件檢測的分辨率。
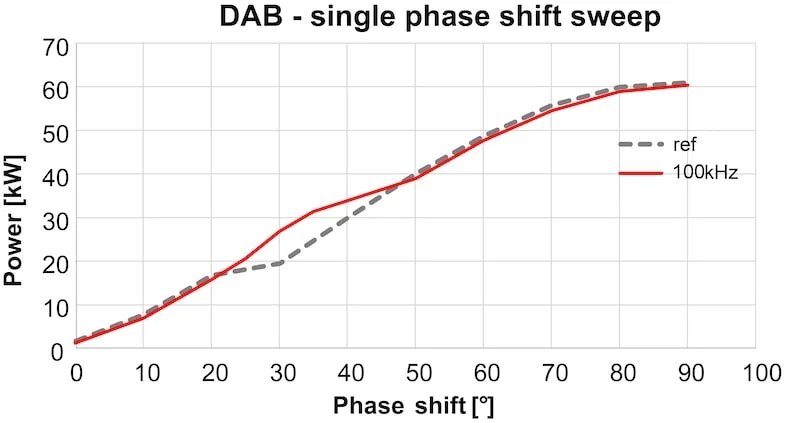 圖1
圖1Typhoon HIL仿真器在各種電力電子應用中成功應用超過十年,最新一代能夠以低至200 ns的時間步長和3.5 ns的DI采樣分辨率模擬電路。
DC-DC轉換器仿真
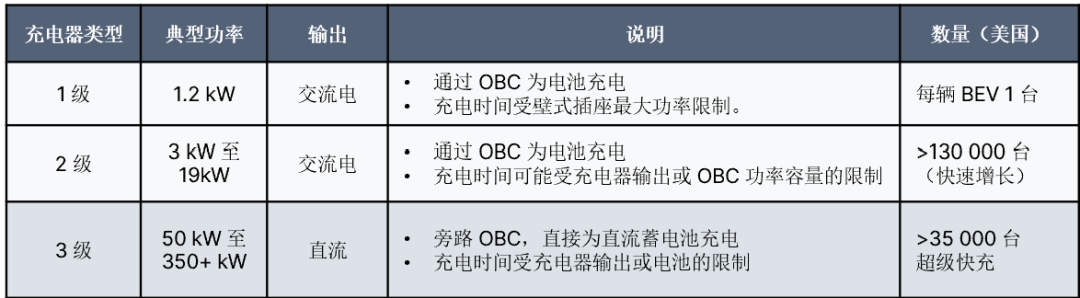
一個典型的電動汽車充電器由輸入功率因數校正(PFC)階段和隔離的DC-DC階段組成,后者通常采用雙有源橋(DAB)或諧振(LLC, CLLLC)轉換器拓撲結構。實時模擬這些DC-DC拓撲結構尤其具有挑戰性,原因包括:
高開關頻率:通常使用高開關頻率以減少高頻變壓器的體積和重量,這在車載充電器應用中尤為重要,因為存在體積和重量限制。如今,超過100 kHz的開關頻率已成為常態,通常采用寬帶隙半導體實現。
在開關頻率下的功率傳輸:在并網轉換器和電動驅動應用中,主要功率傳輸發生在低于開關頻率一個數量級的頻率下。對于具有高頻變壓器的轉換器(如DAB和LLC轉換器),功率傳輸發生在開關頻率下。這意味著即使是小的時間分辨率損失也會直接影響功率傳輸,從而影響模型的保真度,進而影響控制器的操作。
有趣的是,DAB和LLC拓撲的時間分辨率損失的主要來源既不是仿真時間步長,也不是數字輸入采樣分辨率。而是來自于檢測二極管電流零交叉,因為這種類型的換相事件通常在實時應用中的時間步長分辨率下進行檢測。通過以100 kHz開關的DAB轉換器運行,并故意將仿真時間步長設置為相對較長的500 ns,可以說明這一點。如圖1所示,仿真結果在大多數工作點上與參考功率傳輸曲線很好地對齊。然而,在某些點上,存在顯著偏離參考的情況。這些是繞組電流在死區時間內交叉零的工作點。
通過與工業合作伙伴的協作研究,Typhoon HIL總結道,DAB和LLC模型在200 ns及更低的時間步長下仍然不能提供足夠的保真度進行HIL測試。為了改善這些模型中二極管電流零交叉的檢測,開發了一種專門的求解器。
DC-DC轉換器求解器
DC-DC轉換器求解器是一個優化的FPGA模塊,能夠以25 ns的時間步長模擬DAB和LLC系列轉換器。這使得多速率仿真成為可能,擁有兩個仿真速率:
· 由可配置FPGA求解器使用的仿真時間步長,時間步長可降至200 ns。
· 由專門的DC-DC轉換器求解器使用的求解步長,該求解器以25 ns模擬DAB或LLC模型。
這兩個模型部分交換直流電壓和電流。從用戶的角度來看,求解器作為一個單一組件(DAB或諧振轉換器)進行部署,可以適應不同的拓撲變種,如CLLLC。這確保了易用性,同時顯著提高了仿真保真度(見圖2)。
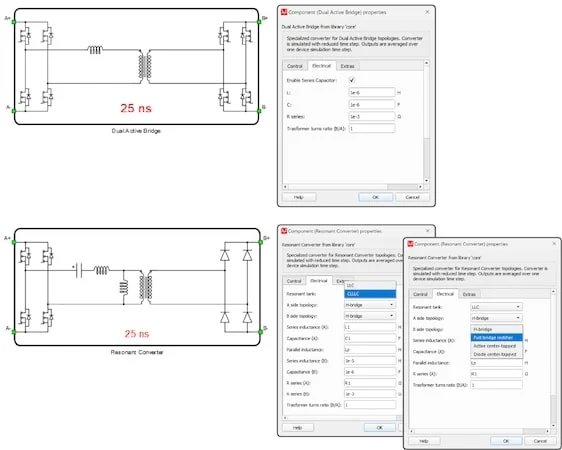 圖2
圖2為了測試該專門求解器的性能,創建了一個實驗設置,使用外部控制器再現控制器時鐘與仿真器時間基準不同步的現實場景。最初在DAB轉換器模型上進行了測試,結果如圖2所示。觀察到功率傳輸作為輸出。實施了各種調制策略,以覆蓋整個操作范圍內的各種工作點,包括具有二極管電流零交叉事件的工作點。更多詳細數據可以在Typhoon HIL發布的白皮書中找到。結果表明,仿真在高達300 kHz的開關頻率下表現良好。
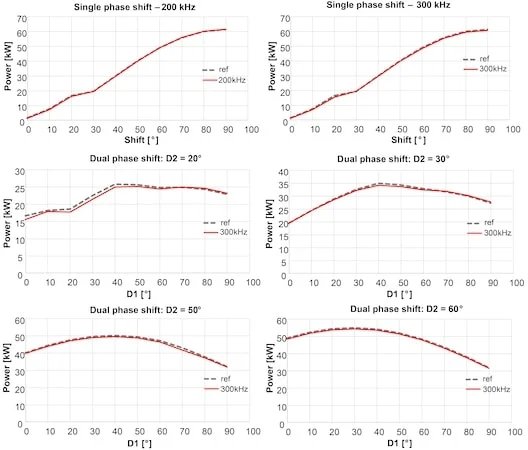 圖3
圖3隨后,測試了幾種LLC諧振轉換器設計,考慮系列諧振頻率fr = 250 kHz。將開關頻率從0.5 fr變化到2 fr,并使用輸出與輸入電壓比作為基準。保持并聯與串聯電感比恒定(k = Lp / Ls = 8)。同時,變化特征阻抗(Zc= √(Ls / C),導致不同的Q因子值和電壓特性,如圖4所示。仿真數據表明,在最高達500 kHz的開關頻率范圍內,仿真表現良好。
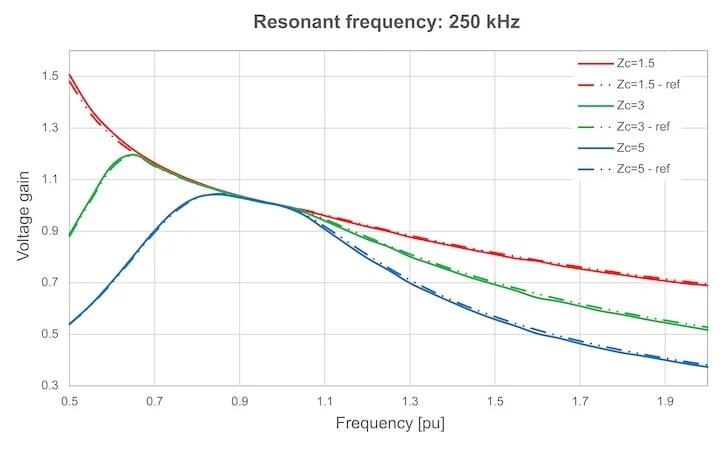 圖4
圖4除了高性能外,設計DC-DC轉換器求解器時還考慮了資源利用率。因此,最多可在單個HIL606設備上模擬8個轉換器。
結論
準確的快速切換DAB和諧振拓撲的實時仿真在實踐中被證明是一個具有挑戰性的任務。Typhoon HIL提供的優化求解器方法,通過在廣泛的典型應用中提供高仿真保真度,同時保持離線仿真平臺的易用性,解決了這些挑戰。
-
電動汽車
+關注
關注
156文章
12353瀏覽量
233972 -
充電器
+關注
關注
100文章
4241瀏覽量
117549 -
實時仿真
+關注
關注
0文章
29瀏覽量
8798
發布評論請先 登錄
雙電機電動汽車驅動防滑控制
車載充電器材料選擇比較

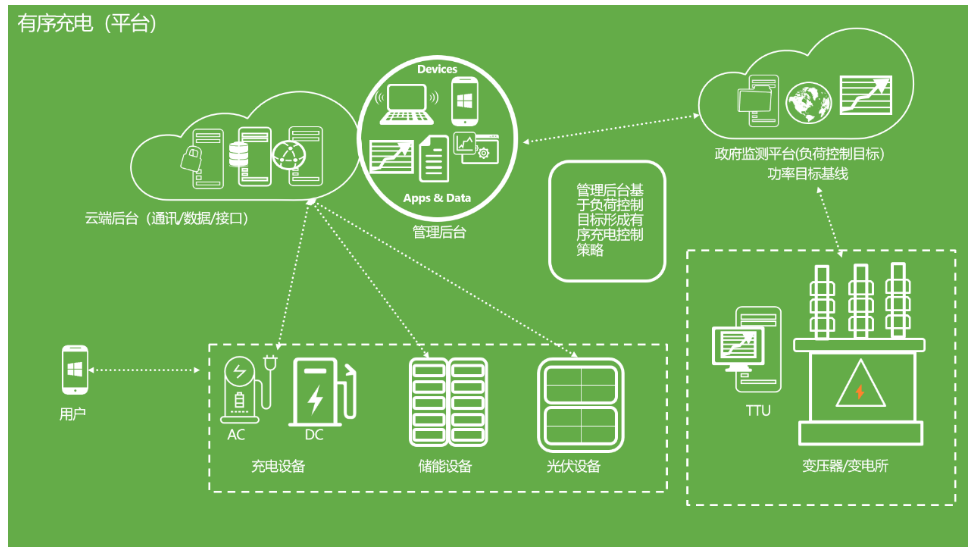
電動汽車有序充電優化策略

安森美車載充電器系統解決方案
直流快速電動汽車充電器的設計技巧與解決方案
Microchip推出三款電動汽車充電器參考設計
雙有源橋變換器簡介和仿真案例分析
電動汽車的智能充電標準與解決方案

Microchip推出全新解決方案讓電動汽車充電器設計更簡單






 工商網監
工商網監

評論