 弱磁控制在電機高速運轉中有什么作用
弱磁控制在電機高速運轉中有什么作用
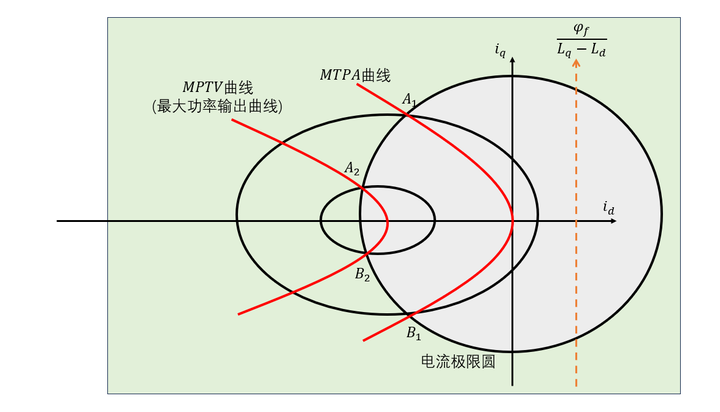
01MTPA和MTPV
永磁同步電機是我國新能源汽車動力裝置的核心驅動裝置,大家都知道在低速時永磁同步電機采用最大扭矩電流比控制,也就是給定一個扭矩,利用最小的合成電流來實現它,從而可以使得銅損最小。
那么在高速的時候,我們無法使用MTPA曲線進行控制,要使用MTPV也就是最大扭矩電壓比來進行控制。也就是說在一定轉速下,使得電機輸出最大轉矩。按照實際控制的思想,就是給定一個扭矩,通過調節iq和id實現最大轉速,那么電壓體現在哪里呢?因為這時候是最大轉速,電壓極限圓是一定的,只有在這個極限圓上找到最大功率點,才能找到最大扭矩點,思路和MTPA不一樣。

02驅動工況

一般是到了轉折速度(也稱為是基速)開始弱磁,也就是下圖的A1點。因此到這個點反向電動勢會比較大,這時候如果不弱磁的話,假設強制推車拉高轉速,這樣就會迫使iq為負向,無法輸出正向扭矩,被迫進入發電工況,當然在這個圖上是無法找到這個點的,因此橢圓在縮小了,無法停留在A1點,只能順著橢圓減小iq,增大id,這樣越來越靠近A2點。
03發電工況
為什么發電也要弱磁呢?高速下發電時不應該利用強磁產生比較大的iq嗎?這是不行的,因為高速下如果不弱磁,反向電動勢+變壓器電動勢+阻抗電動勢可能會非常大,遠遠超過電源電壓,產生可怕的后果,這種情況是SPO不可控整流發電!因此在高速發電下也必須進行弱磁,這樣產生的逆變電壓是可控的。
我們可以來分析一下,假設在高速工況點B2開始制動也就是回饋制動,轉速越來越低,那么越來越不需要弱磁,最終到達B1點,這時候iq和id就可以一直恒定,但是隨著轉速的降低,反向電動勢產生的負iq會越來越不足,這時候就需要電源補償,進入能耗制動。
04總結
剛開始學習電機時,容易被驅動和發電兩種情況繞暈,其實我們應當先把MTPA和MTPV兩個圓先刻繪到大腦中,并且要認識到這時候的iq和id是絕對的,是通過考慮到反向電動勢得到的iq和id。
那么至于iq和id更多的是電源來產生,還是反向電動勢來產生,這就是要靠逆變器來實現調節,而iq和id也是有限制的,調節也不能超出兩個圓,超出電流極限圓,IGBT就會損壞;超出電壓極限圓,電源就要被損壞。
在調節的過程中,目標的iq和id 、 實際的iq和id是關鍵所在,因此工程上都采用標定的方法,在不同的轉速和目標扭矩下標定合適的iq的id的分配比例,從而實現最佳的效率。可見繞了一圈下來,最終還是要看工程標定。
-
永磁同步電機
+關注
關注
28文章
873瀏覽量
49529 -
驅動
+關注
關注
12文章
1838瀏覽量
85262 -
電機
+關注
關注
142文章
9000瀏覽量
145337 -
弱磁控制
+關注
關注
2文章
18瀏覽量
10454
原文標題:電機高速運轉為何要弱磁控制?
文章出處:【微信號:wwygzxcpj,微信公眾號:電機技術及應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
資料分享:《新能源汽車新型電機的設計及弱磁控制》
計算法的弱磁

電動汽車如何使用永磁同步電機弱磁控制的詳細資料免費下載


其利天下技術·無刷電機弱磁控制是什么?有什么好處·BLDC驅動方案






 工商網監
工商網監
評論