") 四川大學:用共軛聚合物可逆極化特性構(gòu)建仿生被動式觸覺傳感器
四川大學:用共軛聚合物可逆極化特性構(gòu)建仿生被動式觸覺傳感器
研究背景
仿生觸覺傳感器件和電子皮膚是未來智能假肢和智能機器人的必要組件。現(xiàn)有主動式觸覺傳感器件(如電阻式、電容式、晶體管式)能夠檢測靜態(tài)和動態(tài)觸覺刺激,但即使在伺服狀態(tài)下也需要源源不斷的能量消耗,導致單個傳感單元的功耗就高達微瓦甚至毫瓦級別,限制了其應用。相比之下,無源式觸覺傳感器件(如壓電式、摩擦電式、離子電式)無需外部能量供應,在受到機械刺激時可以自行產(chǎn)生信號輸出,因此功耗極低;然而,上述被動式觸覺傳感器件通常只對動態(tài)或瞬態(tài)的機械刺激產(chǎn)生響應,而無法監(jiān)測靜態(tài)和緩慢變化的機械刺激,限制了其觸覺感知功能。因此,設計和構(gòu)建既能檢測靜態(tài)刺激又能檢測動態(tài)刺激的全被動式觸覺傳感器件及電子皮膚,是仿生觸覺傳感領域需要解決的問題之一。
Bioinspired Passive Tactile Sensors Enabled by Reversible Polarization of Conjugated Polymers
Feng He, Sitong Chen, Ruili Zhou, Hanyu Diao, Yangyang Han*, and Xiaodong Wu*
Nano-Micro Letters (2025)17: 16
https://doi.org/10.1007/s40820-024-01532-z
本文亮點
1. 通過模擬天然感知細胞的響應行為提出了一種全有機無源式仿生觸覺傳感器件及電子皮膚。
2. 首次利用共軛聚合物獨特的可逆極化特性實現(xiàn)復雜觸覺信息的被動式感知。
3.利用上述觸覺傳感器,在機器學習算法輔助下實現(xiàn)了高準確度的表面紋理檢測、材料屬性識別和形狀輪廓感知。
內(nèi)容簡介
四川大學吳曉東等人通過利用共軛聚合物獨特的可逆極化特性,模擬了天然感知細胞的極化過程,提出了一種新型仿生被動式觸覺傳感器件,可用于靜態(tài)和動態(tài)刺激的無源式檢測。該觸覺傳感器件具有靈敏度高(773 mV·N?1)、功耗超低(nW)和生物友好等優(yōu)勢。基于該新型觸覺傳感器件及電子皮膚,在人工智能算法的輔助下,成功實現(xiàn)了單點觸覺感知(如表面紋理識別、材料屬性感知等)和二維觸覺感知(如物體形狀和輪廓識別),識別準確率高達97.4%。該種仿生觸覺傳感器的設計和構(gòu)建方法為機器人觸覺皮膚、人工智能假肢等領域提供了新的參考和借鑒。
圖文導讀
I仿生被動式觸覺感知的設計概念
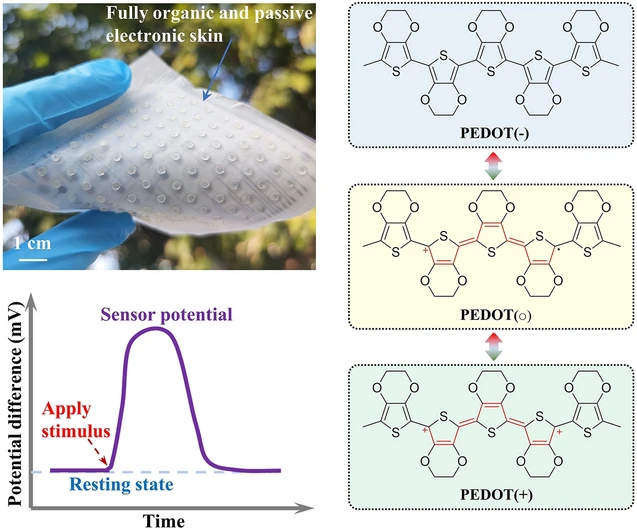
天然皮膚中存在多種感知細胞,這些感知細胞通過跨膜轉(zhuǎn)運特定離子實現(xiàn)從非極化到極化狀態(tài)的轉(zhuǎn)變,最終產(chǎn)生電位差信號。當受到外部刺激(如壓力)時,細胞膜離子通道開啟,導致離子跨膜流動,引起膜內(nèi)外電位差的顯著變化。為了模擬這種天然細胞的傳感行為,本文選擇共軛聚合物材料(如PEDOT:PSS、聚苯胺或聚吡咯),首先將其極化為兩種相反的狀態(tài)(摻雜態(tài)和去摻雜態(tài)),以產(chǎn)生電位差信號;然后使用具有表面微結(jié)構(gòu)的固態(tài)離子電解質(zhì)來模擬離子通道,成功將外部壓力刺激編碼成電位差變化。
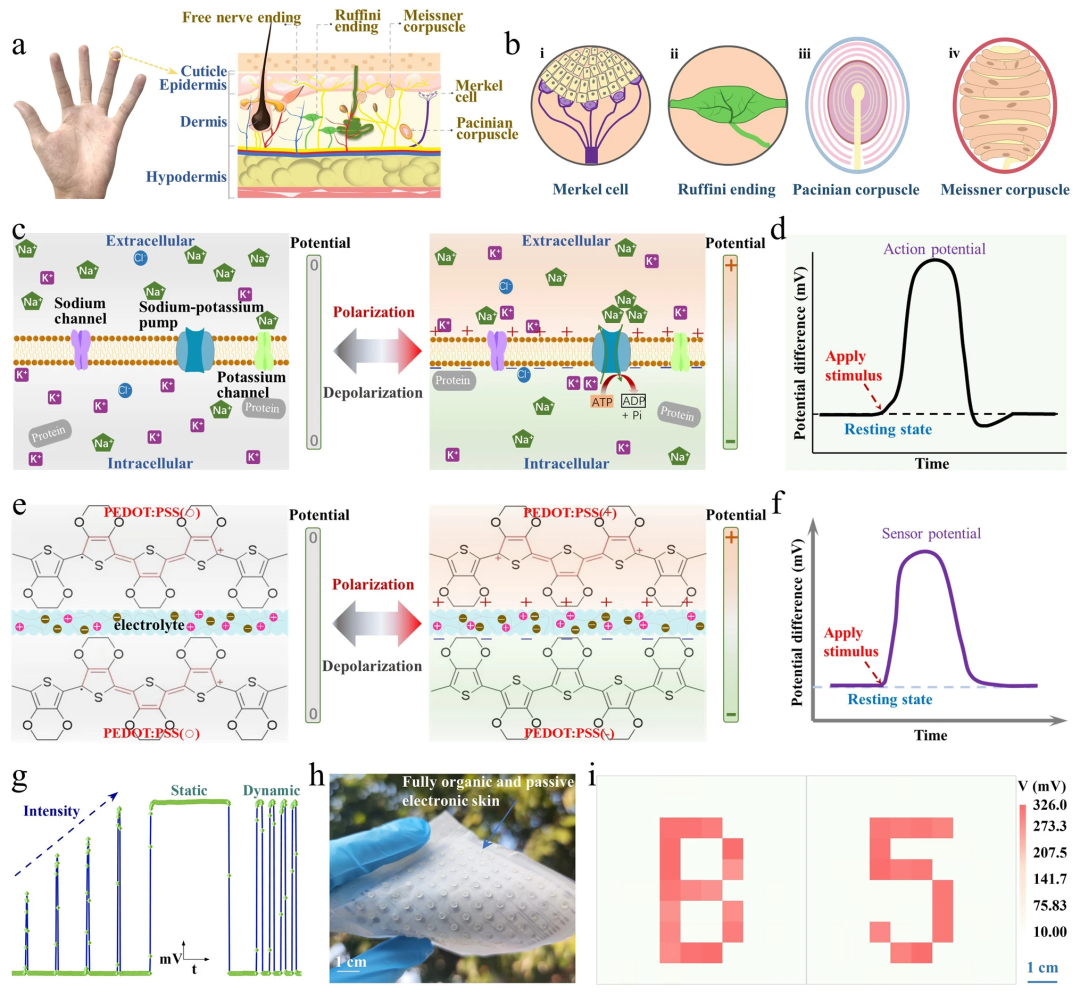
圖1. 基于共軛聚合物可逆極化的仿生被動式觸覺感知。(a, b)天然皮膚中的機械刺激感受器示意圖,包括Merkel細胞(ⅰ)、Ruffini末梢(ⅱ)、Pacinian小體(ⅲ)、Meissner小體(ⅳ)。(c)感知細胞的極化過程示意圖,通過極化可在細胞膜內(nèi)外形成電位差。(d)機械刺激下細胞膜電位差的變化過程。(e) PEDOT:PSS的極化過程示意圖,分為正性極化PEDOTPSS(-),二者之間可以產(chǎn)生電位差。(f)所構(gòu)建的觸覺傳感器在機械刺激下的響應行為。(g)觸覺傳感器在受到不同大小靜態(tài)和動態(tài)刺激時的響應信號。(h, i)基于該方法構(gòu)建的全有機被動式觸覺電子皮膚及其空間輪廓檢測能力。
IIPEDOT:PSS極化過程的表征
PEDOT:PSS 是一種具有離子和電子導電特性的共軛聚合物。它由活性的PEDOT骨架和摻雜劑PSS側(cè)鏈組成,可以通過正極化或負極化調(diào)節(jié)其摻雜狀態(tài)。通過Vis-NIR光譜可以觀察到PEDOT:PSS在不同極化狀態(tài)下的光譜變化,正極化會導致極化子氧化成雙極化子,負極化則會將部分雙極化子還原成極化子。極化過程還會影響PEDOT:PSS的顏色、電阻和電位。上述結(jié)果成功證明了PEDOT:PSS的雙向極化特性。重要的是,PEDOT:PSS的極化過程是高度可逆的,可以通過去極化過程恢復其原有特性,且極化和去極化過程具有良好的可重復性。
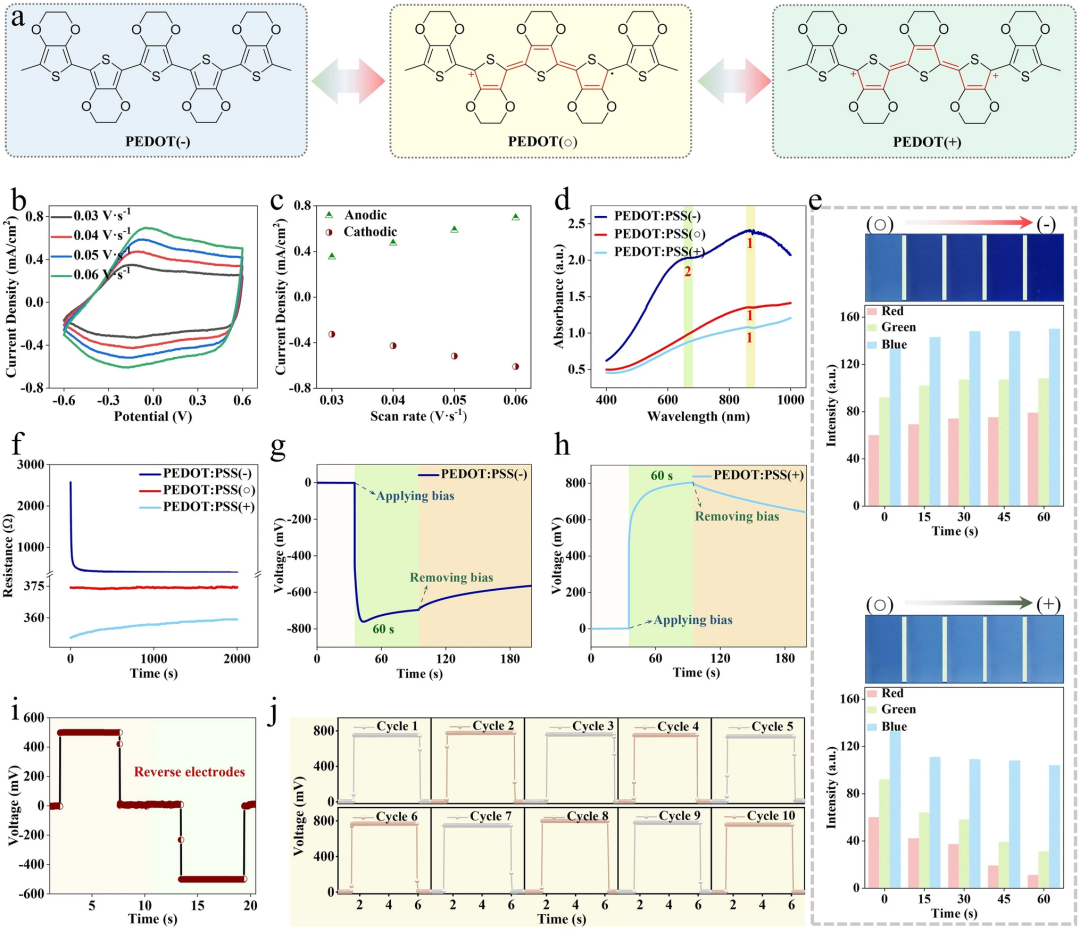
圖2. PEDOT:PSS的極化過程表征。(a) PEDOT在PEDOT:PSS(○)、PEDOTPSS(-)狀態(tài)下的分子結(jié)構(gòu)。(b)不同掃描速率下PEDOT:PSS的循環(huán)伏安曲線。(c)不同掃描速率下從CV曲線提取的峰值電流。(d) PEDOT:PSS(○)、PEDOTPSS(-)的可見光-近紅外光譜。(e)從PEDOT:PSS(○)到PEDOTPSS(+)(下)的顏色變化照片。(f)PEDOT:PSS(○)、PEDOTPSS(-)的電阻變化過程。(g, h)偏壓下PEDOT:PSS(-) (g)和PEDOT:PSS(+) (h)相對于PEDOT:PSS(○)的電位差相對變化。(i) 正向極化和逆向極化下的PEDOTPSS(+)電位差變化。(j) PEDOTPSS(+)在重復極化、去極化和復極化過程中的電位差變化。
III被動式觸覺傳感器的性能評估
基于上述機制構(gòu)建的全有機被動式觸覺傳感器能夠?qū)⑼饨鐧C械刺激編碼為電位差信號輸出,并產(chǎn)生連續(xù)且平滑的信號相應過程。通過調(diào)整離子電解質(zhì)中甘油的含量,可以調(diào)節(jié)傳感器的靈敏度和檢測限,實現(xiàn)對不同力值的可靠識別。該觸覺傳感器具有快速的響應和恢復速度,并且功耗極低(小于1納瓦),非常適合于無需外部電源的自供能系統(tǒng)。相比于傳統(tǒng)傳感器,該觸覺傳感器能夠持續(xù)監(jiān)測靜態(tài)和動態(tài)的機械刺激,并且在傳感器經(jīng)過5000次循環(huán)測試后仍顯示出良好的相應行為。此外,該觸覺傳感器完全由生物相容和可降解的材料構(gòu)成,具有出色的生物安全性和環(huán)境友好性。
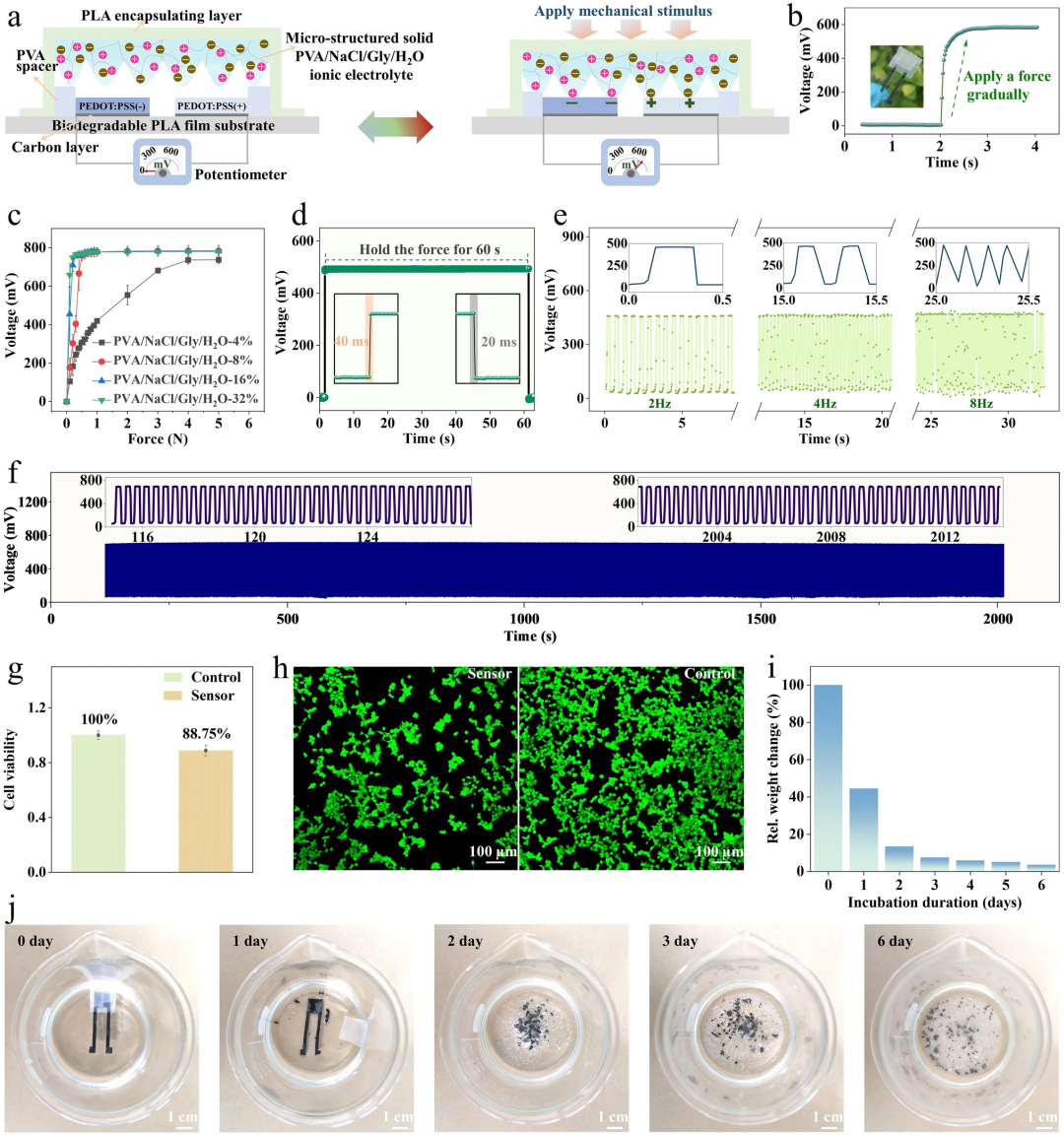
圖3. 仿生被動式觸覺傳感器的結(jié)構(gòu)和性能。(a)受力前后觸覺傳感器的結(jié)構(gòu)變化示意圖。(b)逐漸施加力時傳感器的電位差變化。(c)基于不同甘油(Gly)含量PVA/NaCl/Gly/H?O電解質(zhì)的傳感器響應行為。(d)觸覺傳感器的響應與恢復速率,以及在持續(xù)力(60 s)下的傳感器信號輸出,表明傳感器具有良好的靜態(tài)刺激檢測能力。(e)傳感器在不同頻率下(分別為2、4和8 Hz)的電位差變化,表明傳感器具有低頻動態(tài)刺激監(jiān)測能力。(f) 5000次力加載和卸載測試。(g)觸覺傳感器在細胞培養(yǎng)液中浸泡24小時后的細胞活力測試。(i)觸覺傳感器在0.5 M氫氧化鈉溶液中浸泡6天后過程中的相對質(zhì)量變化。(j)照片顯示觸覺傳感器的逐步降解過程。
IV 單點觸覺感知與識別
上述被動式觸覺傳感器模仿了天然皮膚中機械感受器的功能,能夠感知和區(qū)分物體的表面紋理和材料屬性。作為驗證,該觸覺傳感器被集成到假手的指尖部位,通過機械滑動的方式檢測不同物體表面的粗糙度和紋理,然后通過短時傅里葉變換對傳感器的響應信號進行頻譜分析,可以精確地區(qū)分和識別物體表面的微觀紋理特征。此外,該觸覺傳感器還具備識別多種日常物品材料屬性的功能。由于觸覺傳感器響應信號特征比較復雜,超出了人眼的觀測和辨識能力,因此本文采用了基于二維卷積神經(jīng)網(wǎng)絡的機器學習算法來解析和分類這些負責信號,從而實現(xiàn)對不同物體材料屬性的高效識別。
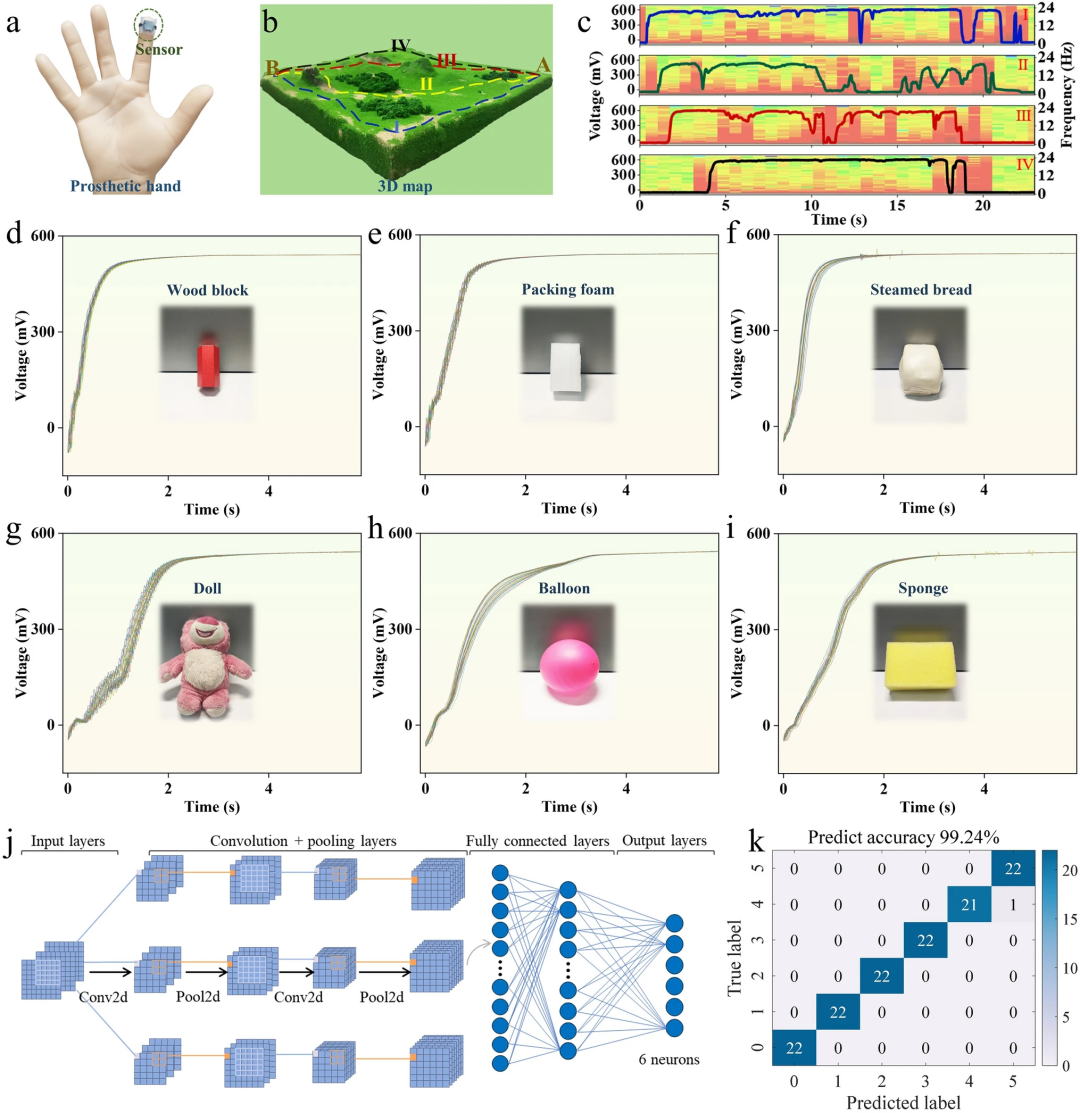
圖4. 基于單點觸覺傳感器的表面紋理識別和材料屬性識別。(a)觸覺傳感器集成在假手指尖的照片展示。(b)在三維地圖模型上從a點滑動到b點的四條路徑(Ⅰ, Ⅱ, Ⅲ和Ⅳ)。(c)集成觸覺傳感器的指尖沿Ⅰ, Ⅱ, Ⅲ和Ⅳ路徑滑動時的信號變化以及相關的STFT光譜。(d-i)集成觸覺傳感器的指尖在重復觸摸木塊(d)、泡沫(e)、饅頭(f)、布偶(g)、氣球(h)、海綿(i)等不同物體時記錄的電位差信號變化。(j)基于2D卷積神經(jīng)網(wǎng)絡(2D CNN)的機器學習框架示意圖。(k)不同材質(zhì)物體的預測混淆矩陣。
V二維觸覺感知和識別
在本項研究中,還開發(fā)了一種全有機、被動式、單電極模式的柔性電子皮膚,用以模擬人類皮膚對物體形狀和輪廓的識別功能。該電子皮膚由100個傳感單元構(gòu)成,共有104個電極,這樣的設計簡化了電子皮膚的電路布線和制造過程。這種電子皮膚通過測量傳感電極與參考電極之間的電位差來檢測外力分布。由于在測量過程中電路通過的電流幾乎為零,有效降低了不同傳感單元之間的干擾和串擾問題。使用3D打印模具作為待檢測物體,驗證了該電子皮膚能夠精確識別字母和數(shù)字輪廓。此外,借助主成分分析(PCA)和支持向量機(SVM)構(gòu)建的機器學習框架,可使該電子皮膚對不同形狀物體的識別準確率達到97.4%,顯示出在智能機器人和人工假肢等領域中的應用潛力。
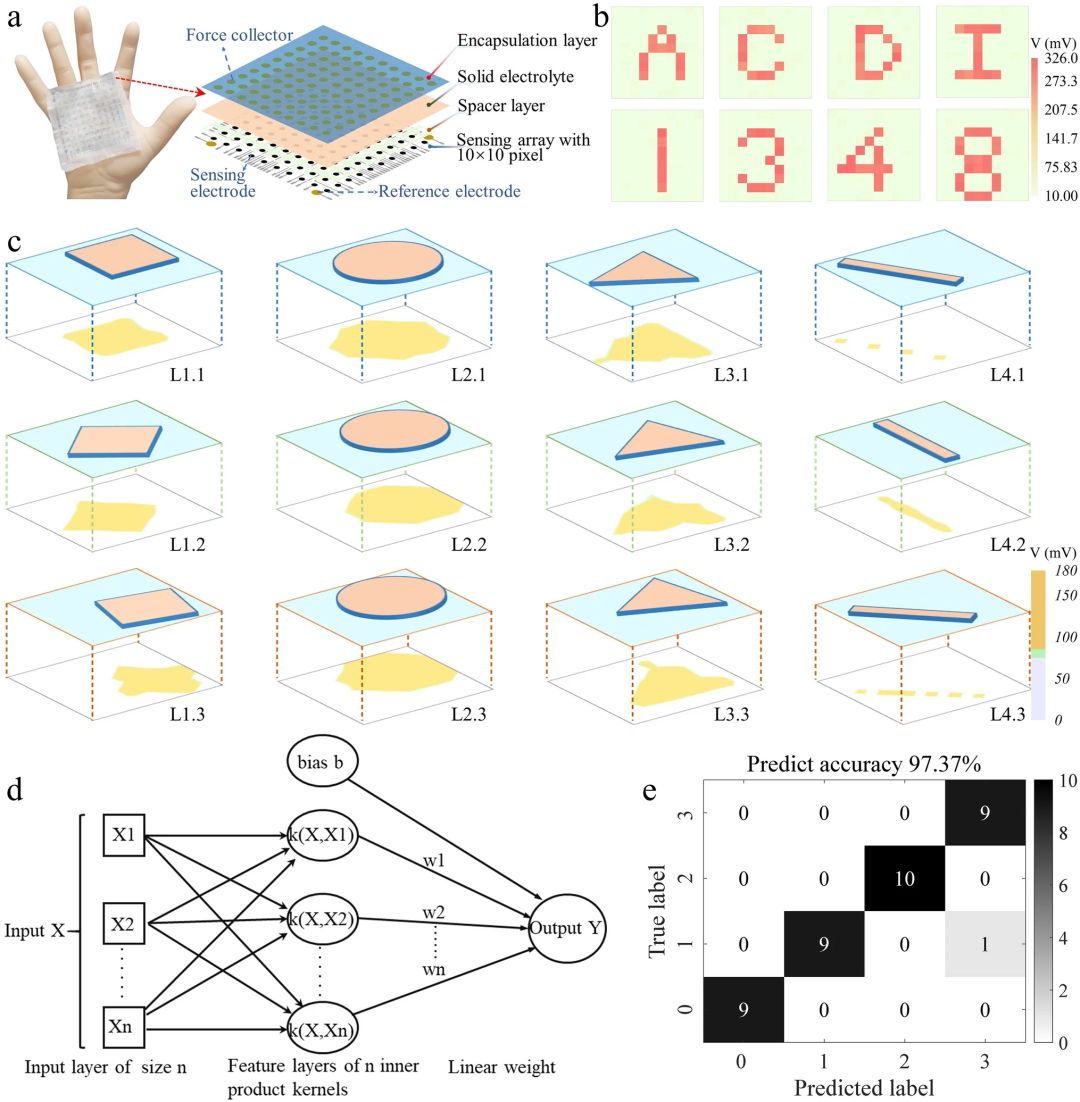
圖5. 用于二維形狀和輪廓識別的觸覺感知電子皮膚。(a) 觸覺感知電子皮膚的組成和布局。(b)將不同形狀的3D打印模具壓在電子皮膚上時,所有傳感像素點相對于參考電極的電位差輸出的空間映射。(c)將不同形狀物體(立方體、圓柱體、三角棱柱和棒狀物體)以不同的位置和角度放置到電子皮膚上時所重建的彩色映射圖像。(d)基于支持向量機(SVM)的機器學習框架示意圖。(e)二維形狀和輪廓識別結(jié)果和混淆矩陣。
VI總結(jié)
本文提出了一種基于共軛聚合物(包括PEDOT:PSS,聚苯胺和聚吡咯)可逆極化的全有機和被動式觸覺傳感器件及電子皮膚。本文對PEDOT:PSS的可逆極化過程和極化機理進行了全面的研究和分析。利用PEDOT:PSS的可逆極化特性,將外界觸覺刺激編碼為電位差輸出,最終建立了一種新的仿生觸覺感知機制。由此構(gòu)建的被動式觸覺傳感器具有超低能耗(nW)、高靈敏度(773 mV·N?1)、快速響應/恢復時間(≈40 ms和≈20 ms)、良好的重讀再現(xiàn)性(超過5000次循環(huán)),最重要的是,同時具有監(jiān)測靜態(tài)和低頻動態(tài)刺激的能力。該觸覺傳感器在表面紋理感知和材料特性感知方面具有很好的應用前景;此外,基于該機理開發(fā)了一種全有機、單電極模式的觸覺感知電子皮膚,在機器學習算法的輔助下實現(xiàn)了高精度(97.37%)的二維形狀和輪廓識別。本研究為模擬天然觸覺感知功能提供了新的感知機制和技術途徑,有望促進人工假肢和智能機器人的發(fā)展。
來源:納微快報
聲明:轉(zhuǎn)載此文是出于傳遞更多信息之目的,若有來源標注措誤或侵犯了您的合法權(quán)益,請與我們聯(lián)系,我們將及時更正、刪除,謝謝。
-
共軛聚合物
+關注
關注
1文章
4瀏覽量
6025 -
電子皮膚
+關注
關注
3文章
108瀏覽量
18501 -
觸覺傳感器
+關注
關注
4文章
85瀏覽量
9338
發(fā)布評論請先 登錄
相關推薦
鋰聚合物電池的應用 (圖解教程)
四川大學(望江校區(qū))基礎教學樓C座201報告廳【講座】
畫風太美 四川大學生航拍創(chuàng)意畢業(yè)照
四川農(nóng)業(yè)大學計算機科學與技術
基于斜極化法的電光聚合物光波導偏振轉(zhuǎn)換器
無線傳感器網(wǎng)絡中的被動式紅外傳感器模型研究

“人工智能聯(lián)合實訓基地”在四川大學制造科學與工程學院與中科視拓的合作下宣布成立
四川大學制造學院與中科視拓共同打造成立人工智能聯(lián)合實訓基地
中國移動與四川大學共建5G智慧高校,打造5G智慧醫(yī)院行業(yè)標桿
四川大學:科學家開發(fā)多路光纖傳感器,可連續(xù)探測腦脊液中多種生物標志物
四川大學機械工程學院:研發(fā)基于金屬腐蝕效應的柔性電化學壓力傳感器
四川大學選購我司HS-DR-5導熱系數(shù)測試儀

被動式速度傳感器的工作原理介紹
四川大學再次選擇我司HS-DR-5導熱系數(shù)測試儀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論