 無人機的飛行原理設計詳解
無人機的飛行原理設計詳解
旋翼和輪子一樣,是一項神奇的發明。
四旋翼無人機更是化作了航拍機,滿足了許多普通人關于天空的想象。
旋翼之所以能飛,玩過竹蜻蜓的朋友應該都知道:當手的搓動給了竹蜻蜓一個旋轉的速度后就會產生升力,讓竹蜻蜓起飛。
同理,多旋翼無人機也是由電機的旋轉,使螺旋槳產生升力而飛起來的。比如四旋翼無人機,當飛機四個螺旋槳的升力之和等于飛機總重量時,飛機的升力與重力相平衡,飛機就可以懸停在空中了。
小時候看漫畫,看到哆啦A夢和大雄頭戴竹蜻蜓自由的在空中翱翔,就特別想和他們一樣,可以飛翔在空中,俯瞰大地。
但是如果現在真有人發明出一模一樣的竹蜻蜓,我肯定是不愿意戴的。因為飛起來的效果是這樣的:
螺旋槳瘋狂旋轉,人也向反方向瘋狂旋轉。..。..
大雄整個人都轉蒙逼了,還怎么能跟靜香一起看風景呢?
根據牛頓第三定律,旋翼在旋轉的同時,也會同時向電機施加一個反作用力(反扭矩),促使電機向反方向旋轉。這也是為什么現在的直升機都會帶一個「小尾巴」,在水平方向上施加一個力,去抵消這種反作用力,保持直升機機身的穩定。
而回到四旋翼飛行器上,它的螺旋槳也會產生這樣的力,所以為了避免飛機瘋狂自旋,四旋翼飛機的四個螺旋槳中,相鄰的兩個螺旋槳旋轉方向是相反的。
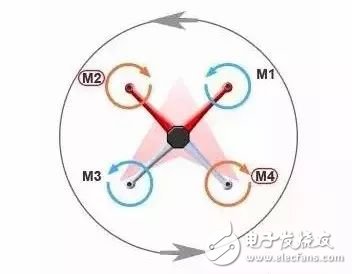
如下圖所示,三角形紅箭頭表示飛機的機頭朝向,螺旋槳M1、M3的旋轉方向為逆時針,螺旋槳M2、M4的旋轉方向為順時針。
當飛行時,M2、M4所產生的逆時針反作用力(反扭矩)和M1、M3產生的順時針反作用力(反扭矩)相抵消,飛機機身就可以保持穩定,不會像大雄那樣「瘋狂」自轉了。

僅如此,多軸飛機的前后左右或是旋轉飛行的也都是靠多個螺旋槳的轉速控制來實現的:
垂直升降
這個很好理解,當飛機需要升高高度時,四個螺旋槳同時加速旋轉,升力加大,飛機就會上升。當飛機需要降低高度時同理,四個螺旋槳會同時降低轉速,飛機也就下降了。
之所以強調同時,是因為保持多個旋翼轉速的相對穩定,對保持飛行器機身姿態來說非常重要,看了之后的講究你就會明白了~
原地旋轉
上面已經說了,當無人機各個電機轉速相同,飛機的反扭矩被抵消,不會發生轉動。
但是當要飛機原地旋轉時,我們就可以利用這種反扭矩,M2、M4兩個順時針旋轉的電機轉速增加,M1、M3號兩個逆時針旋轉的電機轉速降低,由于反扭矩影響,飛機就會產生逆時針方向的旋轉。
水平移動
多軸飛機與我們平時乘坐的客機不同,沒有類似客機那樣垂直于地面的螺旋槳,所以無法直接產生水平方向上的力來進行水平方向上移動。
當然這難不倒我們,還拿上圖的四旋翼來說,當需要按照三角箭頭方向前進時,M3、M4電機螺旋槳會提高轉速,同時M1、M2電機螺旋槳降低轉速,由于飛機后部的升力大于飛機前部,飛機的姿態會向前傾斜。
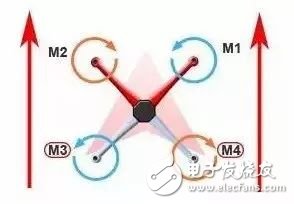
傾斜時的側面平視如下圖,這時螺旋槳產生的升力除了在豎直方向上抵消飛機重力外,還在水平方向上有一個分力,這個分力就讓飛機有了水平方向上的加速度,飛機也因而能向前飛行。

相反的:當M1、M2電機加速、M3、M4電機減速時,飛機就會向后傾斜,從而向后飛行。
同理可得:當M1、M4電機加速,M2、M3電機減速時,飛機向左傾斜,從而向左飛行;
當M2、M3電機加速,M1、M4電機減速時,飛機向右傾斜,從而向右飛行。
這樣一解釋,是不是覺得多旋翼的飛行原理很簡單?~
其實在多旋翼之前,人們是用更復雜的固定翼飛機和直升機來進行航拍的。
但固定翼飛機的起飛降落對場地要求非常高,也不能懸停,沒法垂直上升下降,局限性太大。
而直升機雖載重大、速度快,但是它結構非常復雜而精密,上千個零件無論是從調試還是保養方面都非常的麻煩。
相比而言,多旋翼的飛行原理簡單,機身結構也就更加簡單可靠,消費者可以很快的上手飛行而不需要過多的調試和保養,因此多旋翼很快占領了航拍市場。
-
無人機
+關注
關注
229文章
10420瀏覽量
180140
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論