 不可思議的轉換術!:Modbus TCP轉Ethernet IP網關與HCS最佳搭檔
不可思議的轉換術!:Modbus TCP轉Ethernet IP網關與HCS最佳搭檔
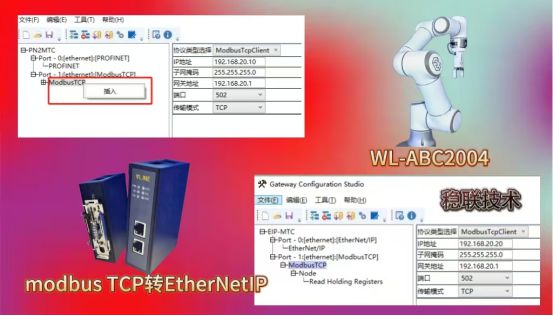
以下是穩聯技術ModbusTCP轉EtherNETIP網關(WL-ABC2004)連接艾利特ELITE機器人模塊的一般應用步驟:準備工作確認設備與軟件:確保擁有艾利特ELITE機器人模塊,且其支持ModbusTCP通信功能。同時準備好相應的ModbusTCP轉EtherNETIP網關設備,并在與機器人模塊處于同一網絡的計算機上安裝好網關配置軟件以及相關的編程軟件.網絡配置:配置艾利特ELITE機器人模塊的網絡參數,如IP地址、子網掩碼、網關等,使其能夠在局域網內正常通信。例如,將機器人模塊的IP地址設置為192.168.1.20,子網掩碼設置為255.255.255.0。

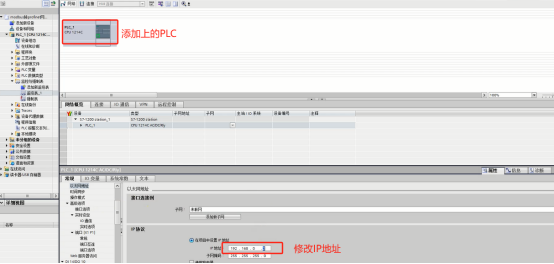
網關配置,添加穩聯技術ModbusTCP轉EtherNETIP網關(WL-ABC2004)網關到PLC組態:打開PLC編程軟件,如羅克韋爾的RSLogix5000等,進入硬件組態界面,添加穩聯技術EtherNETIP轉ModbusTCP網關(WL-ABC2004)的電子描述文件(EDS文件),以便PLC能夠正確識別和配置網關設備。設置網關參數:在組態軟件中找到添加的網關模塊,雙擊進入參數設置界面。設置網關的設備名稱、IP地址等參數,如將網關的IP地址設置為192.168.1.30,并根據實際需求設置數據的輸入輸出字節長度,如設置為16個字節。下載配置到PLC:完成網關參數設置后,將配置下載到PLC中,使PLC能夠與網關進行正常通信。
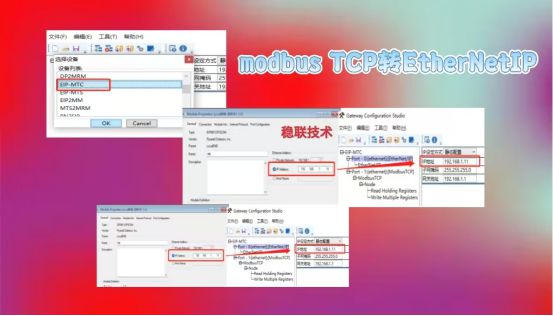
機器人模塊配置建立連接:通過網關配置軟件,建立與穩聯技術EtherNETIP轉ModbusTCP網關(WL-ABC2004)的連接,以便進行后續的參數配置和數據交互.配置通信參數:在網關配置軟件中,選擇相應的機器人模塊作為從站設備,并配置其通信參數,包括IP地址、端口號、從站地址等。確保這些參數與機器人模塊的實際設置一致,例如端口號設置為502,從站地址設置為,映射數據地址:根據機器人模塊的寄存器地址映射表,將需要讀取或寫入的數據地址映射到網關的相應內存區域。例如,將機器人模塊的狀態寄存器地址40001映射到網關的輸入寄存器區的起始地址0,將控制命令寄存器地址40010映射到網關的輸出寄存器區的起始地址10等。
數據交互測試編寫PLC程序:在PLC編程軟件中編寫相應的程序,通過穩聯技術ModbusTCP轉EtherNETIP網關(WL-ABC2004)網關讀取機器人模塊的狀態數據,并根據需要向機器人模塊發送控制命令。例如,編寫程序讀取機器人模塊的關節角度數據,并在PLC中進行數據處理和顯示,同時根據工藝要求向機器人模塊發送運動控制命令.監控與調試:運行PLC程序和機器人模塊,通過監控工具觀察數據的交互情況,檢查數據是否正確傳輸和處理。如果發現數據傳輸錯誤或通信異常,可以通過調試工具檢查網關配置、網絡連接、機器人模塊設置等方面的問題,并及時進行調整和修復.
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28379瀏覽量
206913 -
MODBUS
+關注
關注
28文章
1799瀏覽量
76949 -
網關
+關注
關注
9文章
4444瀏覽量
51056 -
HCS
+關注
關注
0文章
12瀏覽量
14445 -
Ethernet IP
+關注
關注
0文章
16瀏覽量
5536
發布評論請先 登錄
相關推薦
捷米特EtherNet/IP轉MODBUS網關將變頻器接入EtherNet/IP
EtherNet/IP 轉 Modbus 協議網關

EtherNet/IP主站轉Modbus-TCP協議網關

EtherNet/IP轉Modbus-RTU協議轉換網關
EtherNet/IP主站轉Modbus-TCP協議轉化網關
EtherNet/IP轉Modbus-TCP協議轉換網關
EtherNet/IP轉Modbus-TCP協議網關(EtherNet/IP轉Modbus-TCP)

EtherNet/IP轉Modbus-RTU主站網關(EtherNet/IP轉Modbus-RTU)
EtherNet/IP轉Modbus-TCP協議網關(JM-EIP-TCP)
EtherNet/IP轉Modbus-TCP協議網關模塊的配置與應用詳解

Modbus轉Ethernet IP網關模塊與匯川PLC通訊案例

Modbus轉Ethernet/IP網關模塊與匯川PLC通訊在網關配置軟件中的配置







 工商網監
工商網監
評論