

卡爾曼濾波的基本原理
卡爾曼濾波是一種基于貝葉斯濾波的算法,它通過結(jié)合預(yù)測和更新兩個步驟來估計系統(tǒng)的狀態(tài)。算法的核心在于最小化估計誤差的方差,從而提供最優(yōu)的狀態(tài)估計。
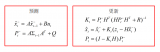
- 預(yù)測步驟 :基于系統(tǒng)的動態(tài)模型,預(yù)測下一時刻的狀態(tài)和協(xié)方差。
- 更新步驟 :利用新的觀測數(shù)據(jù),調(diào)整預(yù)測狀態(tài),以減少誤差。
卡爾曼濾波的關(guān)鍵優(yōu)勢在于其遞歸性,這意味著它可以實時處理數(shù)據(jù)流,而不需要存儲整個觀測序列。
機器人導(dǎo)航中的卡爾曼濾波
在機器人導(dǎo)航中,卡爾曼濾波被用來估計機器人的位置、速度和方向。這些信息對于機器人的自主行動至關(guān)重要。
狀態(tài)估計
機器人的狀態(tài)通常包括位置(x, y)和方向(θ)。卡爾曼濾波通過結(jié)合傳感器數(shù)據(jù)(如里程計、陀螺儀和GPS)來估計這些狀態(tài)。
- 里程計 :提供機器人的線速度和角速度。
- 陀螺儀 :提供角速度,用于估計方向變化。
- GPS :提供全局位置信息,但可能存在較大的噪聲。
卡爾曼濾波將這些傳感器數(shù)據(jù)融合,以獲得更準(zhǔn)確的狀態(tài)估計。
定位和地圖構(gòu)建
在同時定位與地圖構(gòu)建(SLAM)任務(wù)中,卡爾曼濾波被用來估計機器人的位置和構(gòu)建環(huán)境地圖。通過融合來自激光雷達(dá)(LIDAR)、攝像頭等傳感器的數(shù)據(jù),卡爾曼濾波可以幫助機器人在未知環(huán)境中導(dǎo)航。
避障和路徑規(guī)劃
在避障和路徑規(guī)劃中,卡爾曼濾波可以提供關(guān)于障礙物位置的估計,這對于規(guī)劃安全路徑至關(guān)重要。通過預(yù)測障礙物的動態(tài)變化,卡爾曼濾波可以幫助機器人避免碰撞。
實現(xiàn)卡爾曼濾波
實現(xiàn)卡爾曼濾波需要定義系統(tǒng)的動態(tài)模型和觀測模型。以下是實現(xiàn)卡爾曼濾波的基本步驟:
- 定義狀態(tài)向量 :包含機器人的位置、速度和方向。
- 定義動態(tài)模型 :描述狀態(tài)如何隨時間變化。
- 定義觀測模型 :描述如何從狀態(tài)向量中獲得觀測數(shù)據(jù)。
- 初始化狀態(tài)和協(xié)方差矩陣 :設(shè)置初始估計和不確定性。
- 預(yù)測步驟 :根據(jù)動態(tài)模型預(yù)測下一時刻的狀態(tài)和協(xié)方差。
- 更新步驟 :使用觀測數(shù)據(jù)更新預(yù)測狀態(tài)。
卡爾曼濾波的挑戰(zhàn)
盡管卡爾曼濾波在機器人導(dǎo)航中非常有效,但它也面臨一些挑戰(zhàn):
- 非線性系統(tǒng) :卡爾曼濾波假設(shè)系統(tǒng)是線性的,但在實際應(yīng)用中,機器人的動態(tài)可能是非線性的。這需要使用擴展卡爾曼濾波(EKF)或無跡卡爾曼濾波(UKF)等方法來處理非線性。
- 傳感器噪聲和誤差 :傳感器數(shù)據(jù)可能包含噪聲和誤差,這會影響卡爾曼濾波的性能。
- 計算資源 :對于大規(guī)模系統(tǒng),卡爾曼濾波的計算需求可能很高,尤其是在實時應(yīng)用中。
結(jié)論
卡爾曼濾波是機器人導(dǎo)航中一個不可或缺的工具,它通過融合多種傳感器數(shù)據(jù)來提供準(zhǔn)確的狀態(tài)估計。盡管存在挑戰(zhàn),但卡爾曼濾波及其變體仍然是解決機器人導(dǎo)航問題的有效方法。
-
機器人
+關(guān)注
關(guān)注
212文章
29043瀏覽量
210172 -
存儲
+關(guān)注
關(guān)注
13文章
4432瀏覽量
86617 -
導(dǎo)航
+關(guān)注
關(guān)注
7文章
538瀏覽量
42805 -
卡爾曼濾波
+關(guān)注
關(guān)注
3文章
166瀏覽量
24831
發(fā)布評論請先 登錄
相關(guān)推薦
卡爾曼濾波基礎(chǔ)知識
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
移動機器人核心科技解碼:導(dǎo)航、感知與掌控力的深度剖析
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】+數(shù)據(jù)在具身人工智能中的價值
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
卡爾曼濾波在信號處理中的應(yīng)用分析
卡爾曼濾波在圖像處理中的應(yīng)用實例 如何調(diào)優(yōu)卡爾曼濾波參數(shù)
卡爾曼濾波器的特性及仿真

卡爾曼濾波的優(yōu)缺點有哪些
自動停車機器人,如何快速構(gòu)建?

編碼器在機器人系統(tǒng)中的應(yīng)用
其利天下技術(shù)·搭載無刷電機的掃地機器人的前景如何?
卡爾曼濾波是什么 卡爾曼濾波與目標(biāo)追蹤技術(shù)分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論