 1 美元的雷達運動傳感器內部是怎樣的?
1 美元的雷達運動傳感器內部是怎樣的?
“最近買了一些便宜的 RCWL-0516 微波運動傳感器,讓我們看看幾塊錢的雷達運動傳感器內部是怎么樣的。”
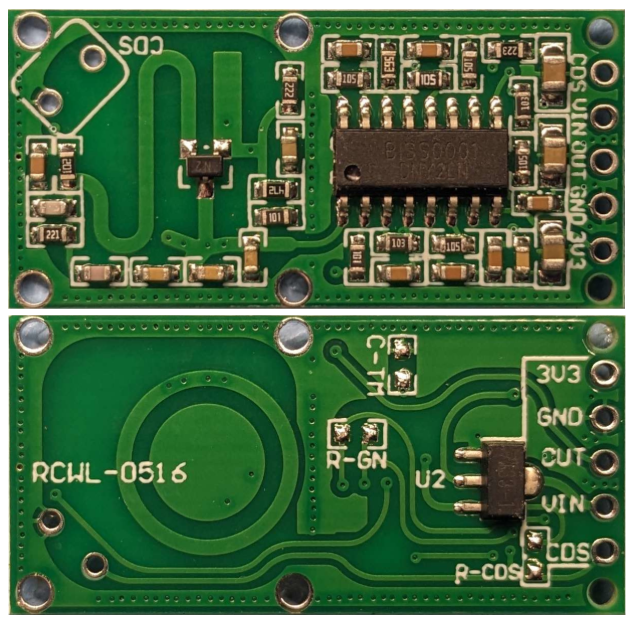
我只需將 VIN 引腳連接到 5 伏電壓,將 GND 連接到地,并在 3V3 引腳上添加一個 1 uF 的去耦電容,就能讓它正常工作。當有人在 ~5 米范圍內移動時,OUT 引腳會升至 3 伏,持續 3 秒鐘。 顯然它能工作,但它如何工作呢?
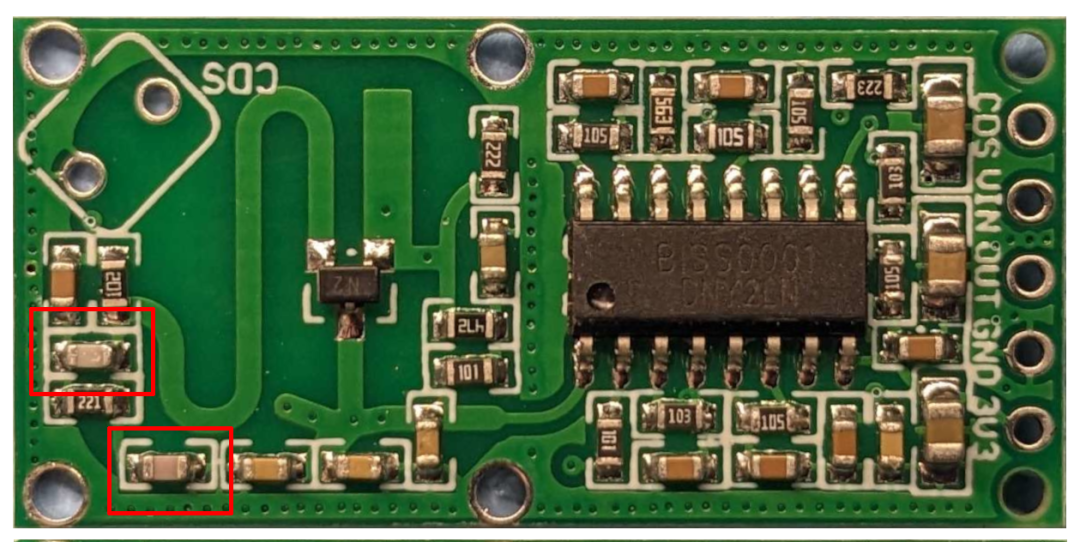
我先找到了核心的 SOIC-16 芯片的數據手冊。原來 BISS0001 是一款紅外運動傳感器芯片。它是如何工作的?
一般來說,運動和速度感應(多普勒)雷達的工作原理是發送連續載波,然后將接收到的信號與發射的載波混合,形成低頻的 IF 信號。如果反射信號來自移動的物體,接收到的信號會與發射的信號慢慢發生相位漂移,產生幾個赫茲的拍頻(beat frequency)。由于運動傳感器并不關心確切的速度,因此芯片所要做的就是尋找毫伏級的變化:所有的復雜工作都已經完成。
在這個模塊中,IF 信號通過第 14 引腳進入芯片,但芯片通過第 16 引腳輸出經過放大的副本,這對示波器更為友好:
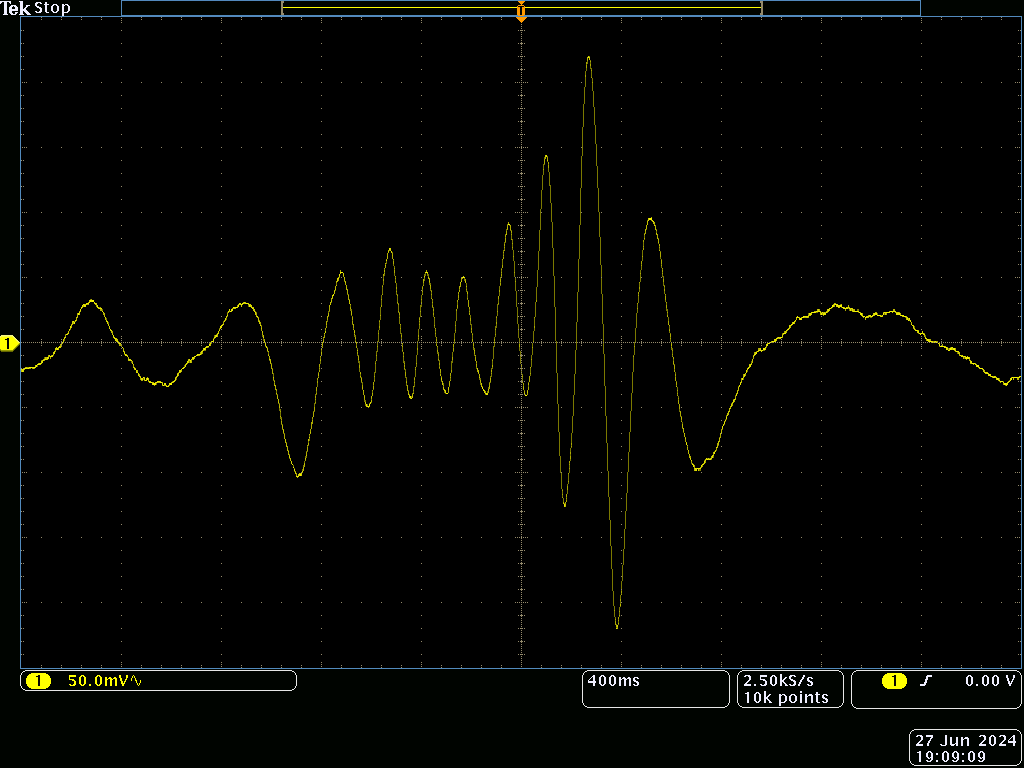
在軌跡的中間,是我將一臺筆記本電腦向傳感器方向移動了約 40 厘米。但傳感器不僅捕捉到了筆記本電腦移動時的信號,還捕捉到了我伸手去停止示波器時產生的一些較慢的水平變化。這條軌跡足以讓我們弄清雷達使用的頻率:當筆記本電腦移動時,有 8 個峰值,這意味著往返路徑長度變化了 8 個波長。如果8個波長覆蓋了80厘米的距離,那么每個波長大約是10厘米,與實際波長 9.4 厘米相差不大。
那么神奇的地方在哪里呢?
整個電路板的右側只是 BISS0001,它充當了放大器、比較器和定時器的角色。所有的射頻功能都在電路板的左側,只使用了少量元件:
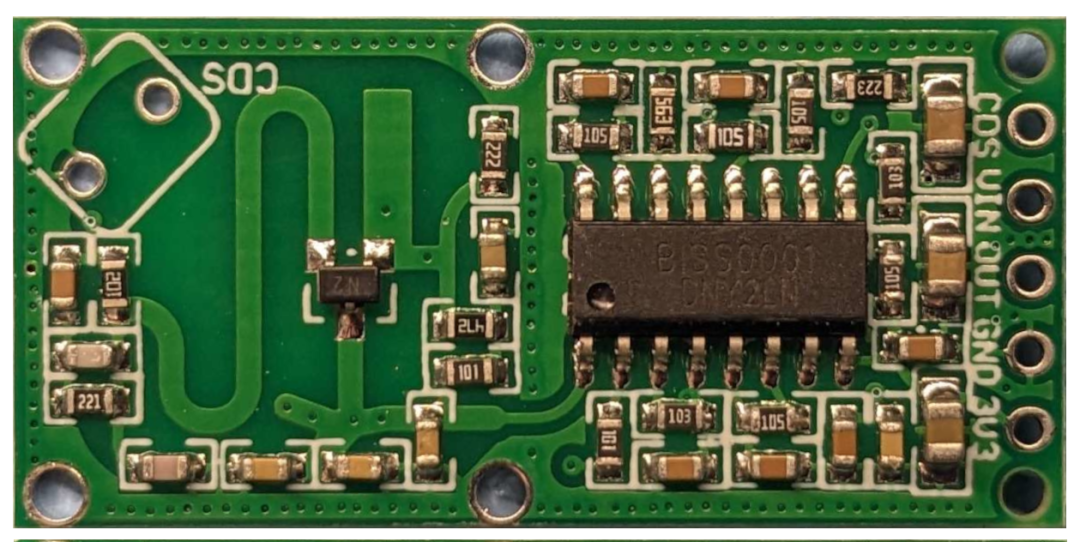
乍一看,這只是一個工作頻率為 3.18 千兆赫的單晶體管振蕩器:
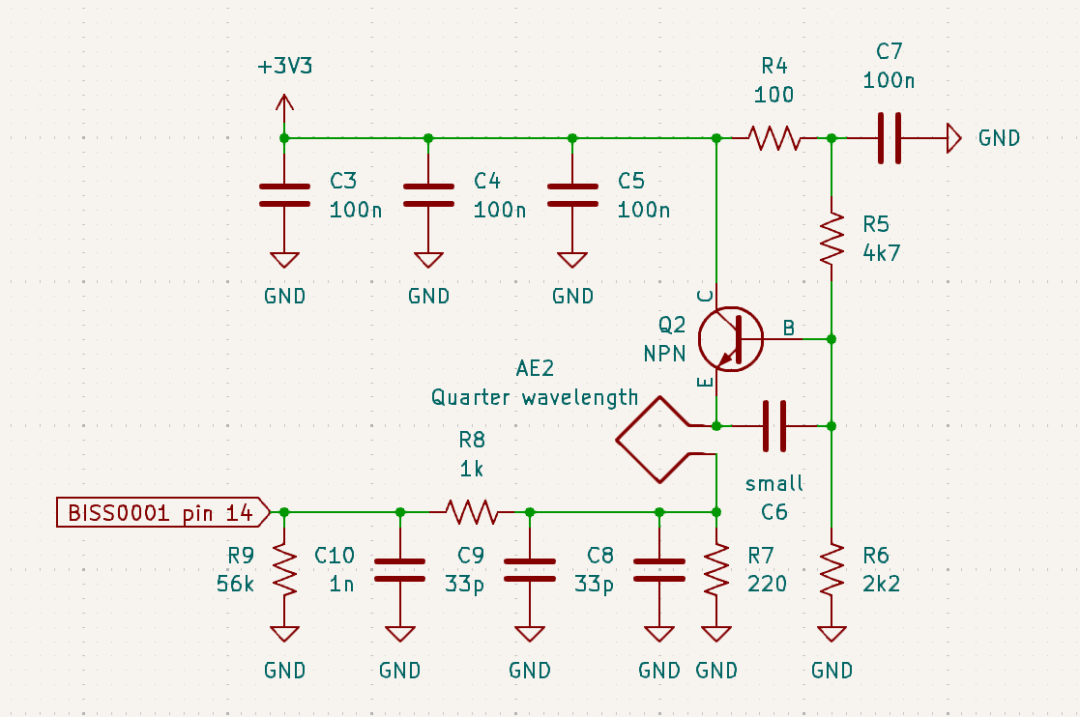
發射器上的 S 形走線是一個微波諧振器,也是一個天線,由 BJT 晶體管驅動,諧振器和平行銅導線形成的電容提供反饋,以維持振蕩。我懷疑背面的環形結構只是為了防止其他頻率的振蕩,許多非常類似的傳感器都沒有這樣的結構,或者僅僅使用一個實心的地平面。振蕩器相當不穩定,會因為手的電容和偏置漂移而漂移幾兆赫。這可能是為什么模塊對電源噪聲非常敏感的原因。 雖然看起來是一個振蕩器,但實際上它是兩個振蕩器的結合。微波振蕩以 20 MHz 左右的頻率脈沖,在發射器上產生這種波形:
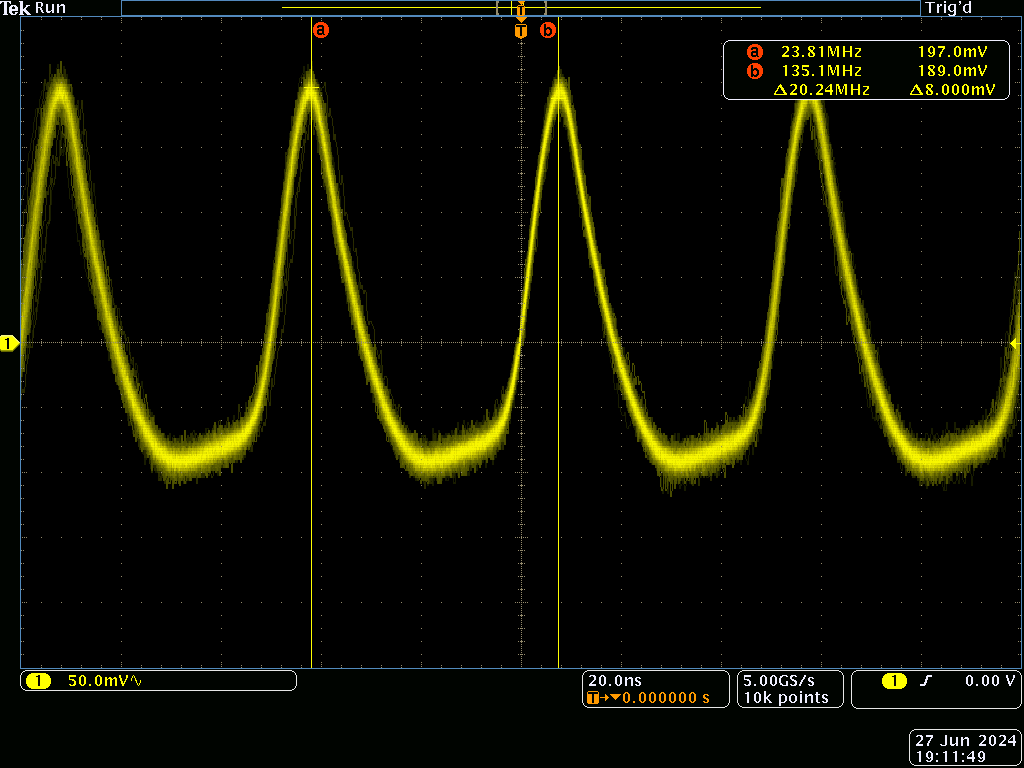
示波器無法直接觀測到3 GHz的信號,但這個信號在波形的下降部分之外是存在的。 發生的情況是,當振蕩器運行時,它會改變 33 pF 的電容,使發射極電壓升高,直到振蕩器無法再運行。此時,220 歐姆電阻會對電容放電,從而在幾納秒內重新啟動振蕩。 這種脈沖使它能作為超級再生接收器工作。一旦晶體管的增益超過 1,振蕩器不會立即啟動,它需要一個微小的激勵開始工作。諧振器中的任何信號都會被反復放大,直到大到足以給電容充電并重新開始循環。由于振幅呈指數增長,即使微小的射頻信號也會增加脈沖頻率,從而將振蕩器變成一個靈敏的接收器。(這就是為什么振蕩器啟動時無需等待太長時間,噪聲會迅速被放大,直至使晶體管放大器崩潰)。 等等,如果它是在振蕩器啟動時接收,然后再發射,那它怎么能看到移動物體的相位變化呢? 由于關閉時間約為 15 納秒,任何來自 2.5 米以外靜態物體的回波都會在振蕩器啟動期間到達。這些靜態回波充當雷達的本地振蕩器,超再生接收器從靜態和移動回波的干擾中檢測調幅信號。在有大量反射的室內環境中,總會有一些射頻反彈,觸達移動的物體,無論它們離得多近。
這種 “自以為是” 的雷達方法可能就是傳感器性能非常不穩定的原因;在室內,它工作得非常好,測距可達 5 米,但在室外,如果沒有靜態回波,它往往根本無法工作。
有點意思,S 波段發射機:
我嘗試的第一項改裝是移除導致 20 Mz 脈沖的電容:
這就把它變成了一個發射器,只要在振蕩器的任何地方施加信號,就能對它進行頻率調制。此外,通過周期性地開啟和關閉電源,可以控制這個發射器的開關。
即使沒有脈沖和超級再生部分,雷達仍然可以工作,只是 IF 信號要弱得多,大大降低了靈敏度。原因是振蕩器本身充當了一個混頻器,將接收到的信號降頻,但是這個過程中沒有增益。沒有增益意味著信號不會被放大,因此雷達的靈敏度會因為信號弱而降低。
雙基地雷達:
那么我們能否將其用于更傳統的雷達設置中呢?我試著把另一個未修改的模塊作為接收器放在發射器旁邊,結果得到了更穩定的回波信號:
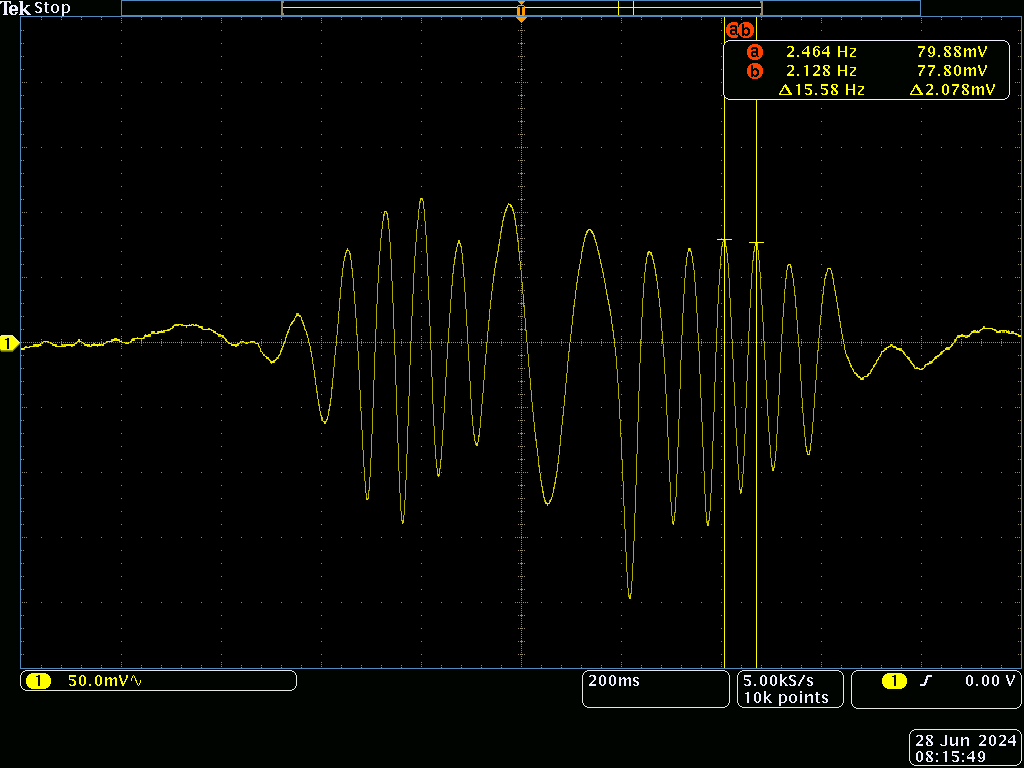
將筆記本電腦移向雷達和遠離雷達時,奇怪的振幅變化消失了,從我相對緩慢移動的手發出的回波信號要弱得多,這也是多普勒雷達的預期效果。另一方面,由于接收器不斷受到來自發射器的射頻干擾,遠處的返回信號也更弱。它作為運動傳感器的功能也較差,因為它需要有明顯的移動才能觸發,而不像通常情況下,幾乎任何東西都能觸發它。 另一方面,通過運行 FFT 或簡單地檢測 IF(芯片的 14/16 引腳)上的零交叉,它可以很好地用作速度傳感器。計算方法非常簡單,只需將波長乘以拍頻(beat frequency),再除以 2 即可得出速度。例如,示波器軌跡中的最高拍頻為 15 Hz,因此速度為 0.7 米/秒: 9.4 cm * 15 Hz/ 2 = 70 cm/s=0.7 米/秒
如果兩個模塊相隔1到2米,戶外性能比單獨使用一個模塊要好得多,兩個模塊之間的區域具有最佳的靈敏度。雖然性能仍然不是非常好,但比單獨模塊在戶外幾乎無法工作要好得多。
原文轉載自: https://10maurycy10.github.io/projects/motion_sensor_hacking/ 遵循 Creative Commons Attribution-ShareAlike 4.0 International License.
-
雷達
+關注
關注
50文章
2930瀏覽量
117465 -
運動傳感器
+關注
關注
9文章
164瀏覽量
30765
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論