 基于英特爾開發板開發ROS應用
基于英特爾開發板開發ROS應用
作者:
劉思宇北京理工大學
隨著智能機器人技術的快速發展,越來越多的研究者和開發者開始涉足這一充滿挑戰和機遇的領域。哪吒開發板,作為一款高性能的機器人開發平臺,憑借其強大的計算能力和豐富的接口,為機器人愛好者和專業人士提供了一個理想的實驗和開發環境。
本文旨在為讀者提供一個全面的指南,從哪吒開發板的簡介開始,逐步引導讀者完成Ubuntu 20.04操作系統的安裝,ROS1(Robot Operating System)的部署,以及最終的ROS應用開發和部署過程。
1哪吒開發板簡介
哪吒開發板以其信用卡大小的緊湊設計和強大的計算能力,成為了機器人開發領域的一大亮點。它搭載了高性能的處理器,配備了足夠的內存和存儲空間,支持多種操作系統,包括但不限于Windows和Linux。此外,哪吒開發板還提供了豐富的擴展接口,包括GPIO、USB、HDMI等,使其能夠輕松連接各種傳感器和執行器,滿足不同層次的開發需求。
以下是哪吒開發板的主要特點:
1. 處理器:搭載Intel N97處理器(Alder Lake-N),提供高達3.6GHz的時鐘頻率和12W的TDP,確保了強大的處理能力。
2. 圖形處理:內置Intel UHD Graphics Gen12 GPU,支持高分辨率顯示,為視覺處理和圖形應用提供支持。
3. 內存與存儲:
板載8GB LPDDR5內存,提供高速的數據訪問能力。
64GB eMMC存儲,為操作系統和應用程序提供足夠的存儲空間。
4. 接口豐富:
3個USB 3.2 Gen 2 Type-A端口,2個10針USB 2.0/UART端口,提供多種外設連接選項。
1個HDMI 1.4b端口,支持高清視頻輸出。
5. 擴展能力:配備40針GPIO連接器,支持PWM、UART、I2C、I2S、SPI和ADC等多種功能,便于連接各種傳感器和執行器。
6. 安全性:板載TPM 2.0,提供硬件級別的安全保障。
7. 電源設計:支持12V直流輸入,5A電流,確保穩定的電源供應。
8. 操作系統支持:兼容Windows和Linux操作系統,為開發者提供了靈活的選擇。
9. 尺寸:信用卡大小的尺寸(85 x 56mm),便于集成到各種設備中。
10. 散熱設計:采用無風扇散熱設計,適合于對噪音敏感或空間受限的應用場景。
哪吒開發板的這些特性使其成為教育、物聯網、數字標牌和機器人等領域的理想選擇。它的高性能和靈活性為開發者提供了廣闊的創新空間。
2設備開箱
開發板以快遞形式發貨,很快就收到了。
打開之后,內部包括一塊開發板、供電電源和無線網卡。
插上電源、顯示器、鼠標鍵盤之后,系統直接開機。
開發板預裝了Win11系統,賬號和密碼一致。
進入系統之后,稍微體驗了一下系統,比較流暢。優化做的還是比較好的。唯一不足的是,內存空間比較小,必須搭配外置存儲設備使用。
3Unbutu20.04系統安裝
要在哪吒開發板上安裝Ubuntu 20.04系統,請按照以下步驟操作:
1. 下載Ubuntu 20.04 ISO文件:
訪問Ubuntu官方下載頁面,選擇適合您設備的Ubuntu版本,點擊下載按鈕。下載完成后,保存ISO文件到您的電腦上。
2. 創建可啟動USB驅動器:
準備一個4GB或更大的USB驅動器,并備份所有數據,因為創建啟動盤的過程中會清除USB上的所有數據。
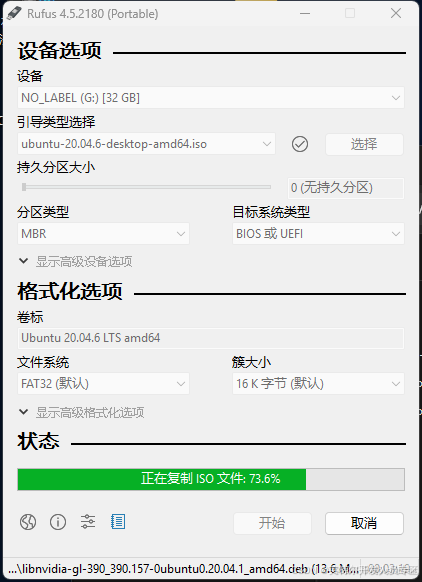
可以使用第三方工具如Rufus來創建可啟動USB驅動器。
3. 啟動安裝程序:
將可啟動USB插入哪吒開發板,重啟設備,并進入BIOS設置,將啟動順序更改為從USB設備啟動。
4. 開始安裝過程:
啟動后,您將看到“嘗試Ubuntu”和“安裝Ubuntu”的選項。選擇“安裝Ubuntu”開始安裝過程。
如果您的電腦使用Intel RST(快速存儲技術),您可能需要在BIOS菜單中禁用它才能繼續安裝。
5. 安裝設置:
選擇您的鍵盤布局,然后點擊“繼續”。
選擇您的安裝類型,可以選擇“正常安裝”或“最小安裝”,并決定是否在安裝過程中下載更新和第三方軟件。
6. 分區:
選擇“擦除磁盤并安裝Ubuntu”以自動分區,或選擇“其他選項”手動分區。
7. 位置和用戶設置:
選擇您的位置和時區,然后為系統創建用戶賬戶和密碼。
8. 完成安裝:
確認安裝設置無誤后,點擊“安裝”開始安裝過程。
安裝完成后,系統會提示您重啟設備。
4ROS1安裝
在Ubuntu 20.04上安裝ROS1(Noetic版本)的步驟如下:
1. 設置Ubuntu的軟件和更新:
打開軟件和更新設置,確保main、universe、restricted和multiverse選項被勾選,然后在下載源中選擇一個中國的服務器以加快下載速度。
2. 添加ROS軟件源:
使用以下命令添加ROS軟件源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
如果網速慢,可以使用國內源,例如上海交大源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.sjtug.sjtu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
3. 添加密鑰:
使用以下命令添加ROS密鑰:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
4. 更新軟件包索引:
運行以下命令更新軟件包列表:
sudo apt update
5. 安裝ROS:
安裝ROS Noetic桌面完整版:
sudo apt install ros-noetic-desktop-full
安裝過程可能需要一段時間,耐心等待安裝完成。
6. 設置環境變量:
將以下命令添加到~/.bashrc文件中,以便每次打開新的終端時自動加載ROS環境:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
7. 安裝其他工具和依賴關系:
安裝python3-rosdep、python3-rosinstall、python3-wstool和build-essential:
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
8. 初始化rosdep:
初始化rosdep:
sudo rosdep init rosdep update
如果rosdep初始化失敗,可以嘗試使用國內版的rosdepc。
9. 驗證ROS安裝:
運行roscore命令來驗證ROS是否安裝成功:
roscore
如果沒有錯誤信息,表示ROS已成功安裝。
5測試ROS
1. 測試turtlesim用例:
打開新的終端,運行turtlesim節點:
rosrun turtlesim turtlesim_node
再打開一個終端,使用鍵盤控制turtlesim:
rosrun turtlesim turtle_teleop_key
2. 啟動roscore:
在一個新的終端中運行roscore,這是ROS系統的中心節點,必須運行才能進行其他操作。
roscore
3. 檢查ROS環境:
在另一個終端中,運行printenv命令來查看當前的ROS環境變量設置。
printenv | grep ROS
4. 列出ROS節點:
使用rosnode命令列出當前活躍的節點。
rosnode list
5. 查看節點信息:
查看特定節點的詳細信息,例如turtlesim_node。
rosnode info turtlesim_node
6. 檢查ROS主題:
使用rostopic命令列出當前活躍的主題。
rostopic list
7. 查看主題消息:
訂閱并查看turtlesim節點發布的turtle1/cmd_vel主題的消息。
rostopic echo /turtle1/cmd_vel
8. 發布測試消息:
嘗試使用rostopic命令向turtle1/cmd_vel主題發布測試消息。
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 10 -- '[geometry_msgs/Twist]' '{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.5}}'
9. 測試ROS服務:
如果turtlesim提供了任何服務,可以嘗試列出并調用這些服務。例如,列出所有服務:
rosservice list
10. 測試ROS動作服務器:
如果turtlesim支持動作(actions),可以列出所有動作服務器并測試它們。首先,列出所有動作服務器:
rostopic list | grep '^/move'
然后,使用rostopic命令監聽動作狀態:
rostopic echo /turtle1/move_action/status
11. 使用RViz進行3D可視化:
如果安裝了RViz,可以使用它來可視化ROS中的3D數據。啟動RViz并配置它以顯示turtlesim的3D模型。
rosrun rviz rviz
在RViz中,添加一個RobotModel顯示項,并訂閱/tf主題來查看機器人的3D模型。
12. 測試ROS參數:
檢查turtlesim_node的參數:
rosparam list
獲取特定參數的詳細信息:
rosparam get /turtlesim_node/background_b
13. 測試ROS功能包:
安裝并測試其他ROS功能包,如rospy_tutorials,來驗證ROS的安裝和功能。
rosrun rospy_tutorials rospy_tutorials.py
14. 測試網絡功能:
如果您有多個機器或需要通過網絡進行通信,測試ROS的網絡功能,如使用roscd和roslaunch。
15. 查看系統日志:
使用dmesg或journalctl命令查看系統日志,以檢查是否有與ROS相關的錯誤或警告。
確保在測試過程中,如果遇到任何問題,查看ROS社區文檔或尋求技術支持。
6總結
在整個安裝和測試過程中,我們成功地在哪吒開發板上安裝了Ubuntu 20.04操作系統,并順利安裝了ROS1(Noetic)版本。通過一系列的測試用例,我們驗證了ROS環境的正確配置和功能,包括節點管理、主題通信、服務調用以及動作服務器的測試。
-
處理器
+關注
關注
68文章
19259瀏覽量
229649 -
英特爾
+關注
關注
61文章
9949瀏覽量
171692 -
開發板
+關注
關注
25文章
5032瀏覽量
97371 -
ROS
+關注
關注
1文章
278瀏覽量
17001
原文標題:開發者實戰|基于英特爾開發板開發ROS應用
文章出處:【微信號:英特爾物聯網,微信公眾號:英特爾物聯網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
英特爾? Edison 開發板上的各種接口及每個接口的用途
英特爾? Edison開發板故障排除及常見問題
如何在您的英特爾? Edison 開發板上更新(刷新)固件
英特爾愛迪生閃存失敗
為什么選擇加入英特爾?
英特爾BOOT Loader開發套件-高級嵌入式開發基礎

實例分析英特爾Genuino 101開發板解析
英特爾開發出Joule計算模塊,面向物聯網開發者、創業者和成熟型企業
英特爾推出Kapoho Point開發板 降低神經擬態開發的門檻

英特爾oneAPI 2023工具包正式上線,幫助開發者利用英特爾硬件的先進功能
基于英特爾開發套件的AI字幕生成器設計
英特爾開發套件『哪吒』在Java環境實現ADAS道路識別演示 | 開發者實戰






 工商網監
工商網監
評論