 ADAS高級駕駛輔助系統
ADAS高級駕駛輔助系統
ADAS是什么
ADAS(Advanced DriverAssistantSystem),高級駕駛輔助系統,通過感知、決策和執行幫助駕駛員覺察可能發生的危險,是提高安全性的主動安全技術,并普遍認為是實現自動駕駛AD 的過程性技術。
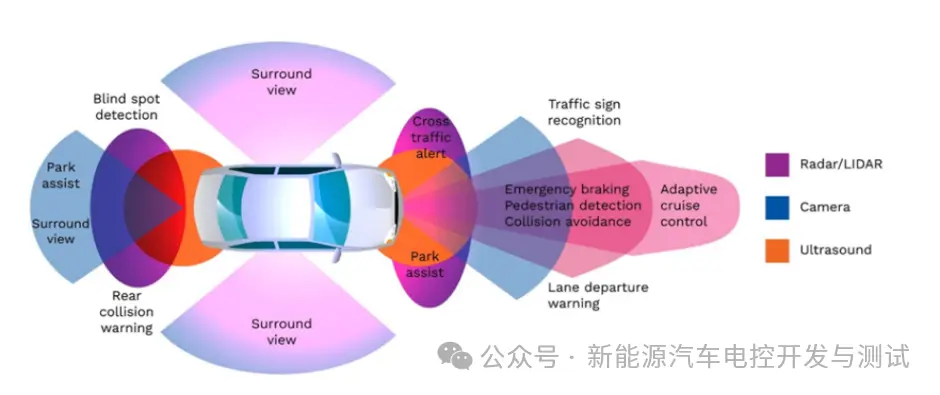
ADAS采用許多傳感器來提高車輛安全性并提供廣泛的自動駕駛功能,其中包括常用的四種傳感器類型。首先是攝像頭傳感器,這種基于攝像頭的解決方案成本較低,已成為ADAS最常見的傳感器技術。另外是毫米波雷達傳感器,會產生無線電波計算物體與波之間的距離,最典型的是作為防撞系統的一部分。第三種則是激光雷達傳感器(LiDAR),使用激光來檢測距離,也可以檢測人員和地理異常情況。第四種則是超聲波,主要用途是停車輔助和自動停車系統。
ADAS功能
ADAS駕駛輔助功能包括許多子功能,如下表
| 序號 | 簡稱 | 全稱 | 中文注釋 |
| 1 | ACC | Adaptive Cruise Control | 自適應巡航系統 |
| 2 | AEB | Automatic Emergency Braking | 自動緊急剎車系統 |
| 3 | FCW | Forward Collision Warning | 前向碰撞預警 |
| 4 | LDW | Lane Departure Warning | 車道偏離報警 |
| 5 | APS | AssistedParkingSystem | 泊車輔助系統 |
| 6 | LKA | Lane Keeping Assist | 車道保持輔助系統 |
| 7 | BSD | Blind Spot Detection | 盲點監測系統 |
| 8 | LCDA | Lane Change Decision Aid systems | 變道輔助決策系統 |
| 9 | FVCMS | Forward vehicle collision mitigation systems | 前向車輛碰撞緩沖系統 |
| 10 | CSWS | Curve speed warning systems | 曲線測速預警系統 |
| 11 | SAS | Speed Assist System | 速度輔助系統 |
ACC(AdaptiveCruiseControl),自適應巡航控制系統是一種智能化的自動控制系統,它是在早已存在的巡航控制技術的基礎上發展而來的。
在車輛行駛過程中,安裝在車輛前部的車距傳感器(雷達)持續掃描車輛前方道路,輪速傳感器采集車速信號。當與前車之間的距離過小時,ACC 控制單元可以通過與制動防抱死系統、發動機控制系統協調動作,使車輪適當制動,并使發動機的輸出功率下降,以使車輛與前方車輛始終保持安全距離。自適應巡航控制系統在控制車輛制動時,通常會將制動減速度限制在不影響舒適的程度,當需要更大的減速度時,ACC 控制單元會發出信號通知駕駛者主動采取制動操作。當與前車之間的距離增加到安全距離時,ACC控制單元控制車輛按照設定的車速行駛。
AEB(AutonomousEmergencyBrakingSystem),自動緊急制動系統采用雷達測出與前車或者障礙物的距離,然后利用數據分析模塊將測出的距離與警報距離、安全距離進行比較小于警報距離時就進行警報提示,而小于安全距離時即使在駕駛員沒有來得及踩制動踏板的情況下,AEB 系統也會啟動,使汽車自動制動,從而為安全出行保駕護航。主要由3大模塊構成,包括控制模塊(ECU),測距模塊,和制動模塊。其中測距塊的核心包括微波雷達、人臉識別技術和視頻系統等,它可以提供前方道路安全、準確、實時的圖像和路況信息。
FCW(Forward Collision Warning),前方碰撞預警系統是通過雷達系統來時刻監測前方車輛,判斷本車與前車之間的距離、方位及相對速度,當存在潛在碰撞危險時對駕駛者進行警告。CW系統并非自動駕駛的直接干預者,它僅提供預警信息,留給駕駛者自行判斷和采取措施。其核心目標是增強駕駛者的感知,提升行車安全,而非代替人類的決策和操作。在行駛中,FCW系統如同一位隱形的助手,時刻守護著駕駛者的安全。通過智能化的預警系統,我們能夠更安心地享受駕駛的樂趣,體驗科技帶來的便利與安心。
LDW(Lane DepartureWarningSystem),車道偏離報警系統通過視覺傳感器(安裝在前擋風玻璃中上部的攝像頭)感知前方道路的車道線,并結合車輛當前行駛狀態以及駕駛員意圖來判斷當前車輛是否已經發生無意識偏離,并在發生無意識偏離車道時提醒駕駛員。
LKA(Lane Keeping Assist),車道保持輔助系統,它通過攝像頭等傳感設備,精準感知并計算出車輛在車道中的具體位置及動態信息。該系統進一步利用車輛的轉向與制動系統對車輛進行操控,旨在防止因車輛偏離車道而引發的交通事故。一旦檢測到車輛有偏離車道的跡象,該系統會微調車輛的轉向,確保其能夠安全地返回原定車道繼續行駛。LKA車道保持輔助系統的實現原理是通過使用傳感器來檢測車輛的位置和行駛方向,然后根據車道線的位置和車輛行駛情況來調整車輛的方向。
BSD(Blind Spot Detection System),盲點監測系統通過安裝在汽車尾部保護杠位置的24GHz雷達傳感器來檢測盲區內存在的車輛,如果有車輛進入視野盲區,則會在后視鏡位置有聲光報警,提醒駕駛者這個時候變道存在危險。
APS(AssistedParkingSystem),泊車輔助系統可以使汽車自動地以正確的停靠位泊車該系統包括環境數據采集系統、中央處理器和車輛策略控制系統,其中環境數據采集系統包括圖像采集系統和車載距離探測系統。其工作原理:通過車載傳感器(超聲波雷達或/和攝像頭)采集圖像數據及周圍物體距車身的距離數據,通過數據線傳輸給中央處理器;中央處理器將采集到的數據分析處理后,得出汽車的當前位置、目標位置以及周圍的環境參數,依據上述參數作出自動泊車策略,并將其轉換成電信號;車輛策略控制系統接受電信號后,依據指令作出汽車的行駛如角度、方向及動力支援方面的操控。為駕駛員在泊車過程中提供橫向或/和縱向輔助。
LCDA(Lane Change Decision Aid systems),變道輔助決策系統,也稱盲區監測,能夠通過雷達,以及安裝的電子控制系統,在左右兩個后視鏡內或者其他地方(A柱下方的角燈)提醒駕駛者后方安全范圍內有無障礙物或來車。從而消除視線盲區,提高行車安全,對初學駕駛者幫助很大。
LCDA功能:盲點檢測(BSD)、變道輔助(LCA)、后向橫穿預警、后向橫穿輔助制動、開門預警(DOW)、正后向防撞預警(RCW)、前方橫向碰撞預警、前向橫穿輔助制動。
LCDA通常由2個后側角雷達來實現并線輔助功能。但隨著技術的不斷精進,搭載4顆角雷達的車型越來越多,這樣就不僅可以實現對后向進行并線輔助,碰撞預警/制動功能,前向也同樣可以實現了。
FVCMS(Forward vehicle collision mitigation systems),前向車輛碰撞緩沖系統,是一種基于傳感器技術的前車碰撞預警系統,通過車載攝像頭、雷達或激光等傳感器,實時監測前方障礙物的距離、速度和方向等信息,并根據算法進行分析和處理,預測前車的運動軌跡和可能出現的碰撞危險,向駕駛員發出警告,提醒其采取措施避免碰撞事故的發生。其通過檢測前方障礙物,提醒駕駛員注意安全,避免前車碰撞事故的發生。而FVCMS系統的性能,主要由其曲線半徑能力決定。
CSWS(Curve speed warning systems),曲線測速預警系統基于車輛自身的傳感器、攝像頭和數據處理單元,以及路況、GPS數據等信息,通過先進的算法分析和處理,識別車輛前方的道路曲率,并預測潛在的危險情況,提供駕駛員警告和提示。其主要原理包括車輛信息采集、數據處理和駕駛員警示三個關鍵部分。在車輛信息采集方面,彎道預警系統通過車輛上的傳感器和攝像頭實時監測車輛周圍的環境和車輛本身的狀態,如速度、加速度等。數據處理單元會對采集到的數據進行實時處理,并和路況、GPS數據等進行比對分析。一旦分析表明車輛行駛進入了一個曲線彎道并有潛在的危險,彎道預警系統將向駕駛員發出警示信號,可以是聲音、光線或者震動等方式,提醒駕駛員有關潛在的危險情況。
SAS(Speed Assist System),速度輔助系統,旨在幫助駕駛員保持車輛的安全速度。通過車輛的傳感器和攝像頭來監測車輛的速度和道路限速信息并通過聲光信息告知駕駛員,根據限速信息進行超速報警并能夠主動干預控制速,使車速持在允許的高限內,此來降低危險。
來源:新能源汽車電控開發與測試
-
adas
+關注
關注
309文章
2183瀏覽量
208630 -
輔助系統
+關注
關注
0文章
64瀏覽量
11635 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166383 -
ADAS駕駛
+關注
關注
1文章
3瀏覽量
1621
發布評論請先 登錄
相關推薦
MXIM推出GSML四通道解串器MAX9286,以更少元件、更短時間實現ADAS (高級駕駛輔助系統)的環視系統設計。
高速NOR閃存怎么配置FPGA
如何使用高速NOR閃存配置FPGA?
德州儀器RF CMOS雷達技術助推ADAS
東風雪鐵龍ADAS高級駕駛輔助系統初體驗
ADAS高級駕駛輔助系統的起緣及功能定義說明
ADAS高級駕駛輔助系統內有哪些系統?主要系統資料概述
無人駕駛時代來臨之際 革新監管范式最為關鍵(附報告)
毫米波雷達需求旺盛,國內芯片企業如何尋求差異化之路?
淺談ADAS高級駕駛輔助系統功能

行業資訊 | ADAS(高級駕駛輔助系統)產業全景調查,滲透率及普及率大大提升

GURC01超聲波傳感和信號處理器 替代E524.09 與(性能對比)

JAE汽車ADAS連接器產品介紹






 工商網監
工商網監
評論