 友思特研討會 新能源電池行業視覺與光電方案線上研討會,精彩回顧與Q&A精選!
友思特研討會 新能源電池行業視覺與光電方案線上研討會,精彩回顧與Q&A精選!
12月12日,友思特“見微知著 喚醒視覺:為新能源電池行業聚能的視覺與光電方案”行業直播圓滿結束!三個小時四位講師的傾情演講、數百名觀眾的全程熱情提問,共同構成了這場深化鋰電行業技術交流、傳播友思特機器視覺與光電檢測優質方案的精彩瞬間。
我們邀您共同回顧直播的精彩問答,在Q&A的思維碰撞中,探索友思特技術方案在新能源電池行業的前進方向!
直播詳情可查看:https://viewsitec.com/lithium-battery-industry-webinar/
精彩QA 一鍵速覽
第一講-外觀實時深度解析:電池貼膠與封裝膜的穿透檢測
Q1:OCT設備可以穿透鋁塑膜嗎,此外還可以穿透哪些材料呢?
A1:鋁塑膜在軟包電池中的使用也非常廣泛,其多層結構依次包括絕緣隔熱的PP層、阻隔水汽的鋁層以及尼龍層。OCT的基礎是紅外光,不能穿透金屬,但除了中間的金屬層之外,其余兩層都可以進行穿透檢測,也可以看到非金屬部分的連接和貼合情況。
此外,無論是肉眼能否看見的非金屬(陶瓷、深色塑料、透明塑料等),OCT都有很好的穿透效果,包括以下材料在內。如果您有相關材料想要進行技術測試,也歡迎大家聯系我們,我們有專屬的視覺與光電實驗室,會提供高效完整的測試服務!
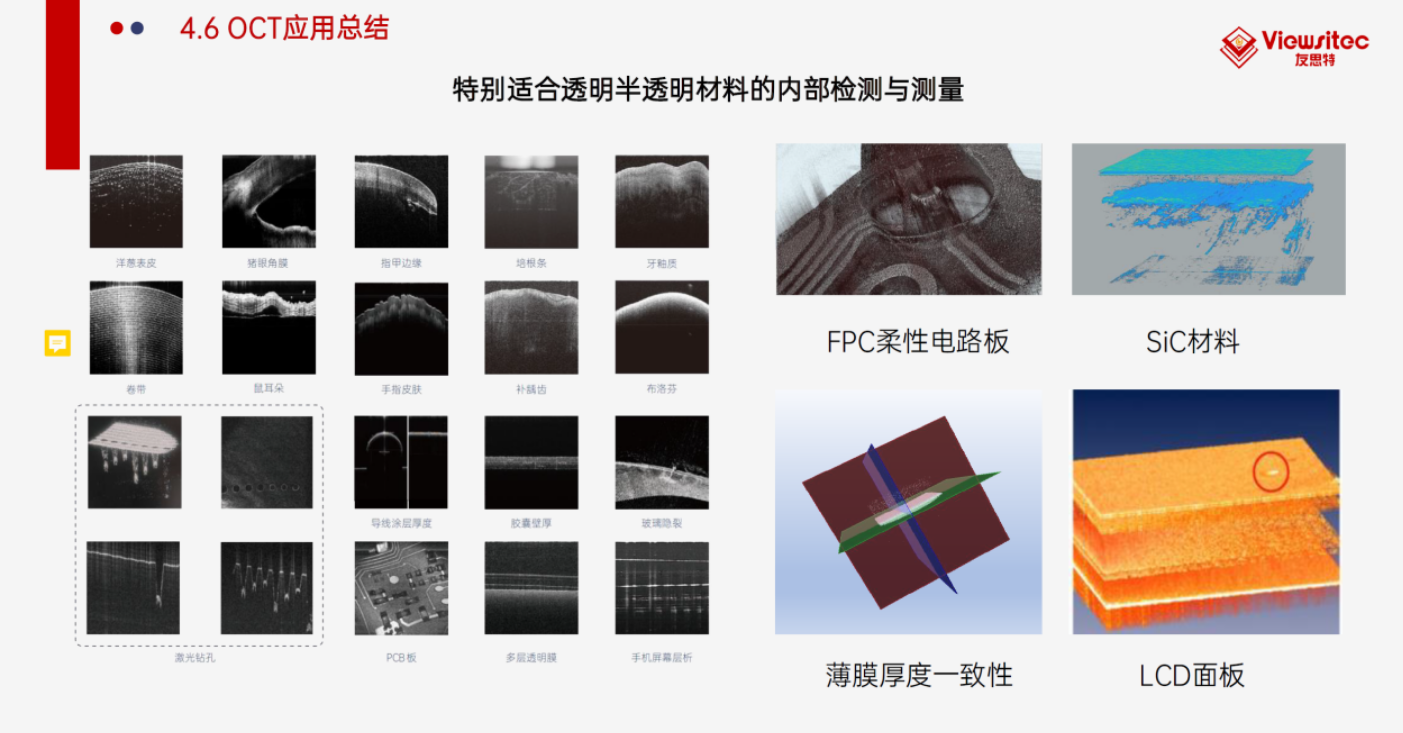
Q2:上頁中有提到碳化硅(SiC)這種材料,OCT系統對它的穿透深度能到多少?
A2:我們的OCT成像系統在空氣中穿透深度最高為6mm,而碳化硅材料的折射率非常大,可以達到2.65左右。在這種材料中,需要除以折射率才能達到實際的成像深度,因此針對SiC實際可以達到2-3mm的成像深度。
Q3:鏡頭焦深是多少,如果樣品厚度超過焦深,那么橫向分辨率要怎么控制?
A3:目前OCT系統的焦深大約為1mm多,我們有很多方法去實現橫向分辨率的優化,比如常規的光學設計帶一個液態鏡頭,可以實現動態焦深變化并適配樣品檢測需求。另外也可以加一個顯微物鏡,通過專門的光學設計支持所需放大倍率的物鏡,并集成到探頭前,以實現不同需求。
Q4:FPC柔性電路板的多層結構是否會影響OCT信號的穿透深度和分辨率?
A4:對于FPC板可以非常清晰看到點膠區域以及表面分層的絕緣膜層,但是在金屬走線區域會有比較高反射的信號,不過依然可以通過改變角度實現更清晰的檢測。
Q5:在電池行業中,OCT相對于X光有什么優勢?
A5:一方面在形態上,X光要做對射的檢測系統即“X光-樣品-傳感器”的三明治結構,有的產線并不好部署。而OCT可以類似工業相機,是基于反射的成像,直接探頭到樣品上方即可完成。另一方面,OCT的分辨率可做到um級別,X射線一般只到百um-mm級別,不過X射線測量范圍大,穿透性也更強,但是有輻射,OCT則適合更小更精密的檢測。
Q6:OCT獲取原始數據是什么格式的?適合用來二次開發的SDK嗎
A6:原始數據是tif,raw、jpg,或者3D格式的dicom,也可以轉換成其他的圖像文件,適合結合其他算法進行二次開發或者分析。
Q7:OCT在檢測微納米級結構時有分辨率限制嗎?
A7:目前我們的OCT系統做到的分辨率為1-2um,再高的話需要采用更高帶寬的光源。
第二講-高帶寬產線護航:新能源鋰電制造中的高精度圖像處理
Q1:FPGA開發(如:ROI 濾波降噪)這部分你們能做嗎?還是要雙方一起做?
A1:在這方面我們會提供一些IP算法庫,如果只是進行簡單的如壓縮、ROI、像素或格式轉換的IP,可以直接利用標準IP算子部署到板卡FPGA中。如果要進行比較復雜的算法,我們會提供開發套件工具給用戶自行開發,我們提供相應的支持。但如果用戶完全沒有IP開發經驗,我們也可以進行這部分的合作開發。
Q2:涂布缺陷ROI提取過程中,如何處理圖像畸變?
A2:除ROI以外,我們會有圖像矯正IP,板卡上可以包含多個處理IP,能夠高效處理圖像畸變。
Q3:高速采集的幀頻最快可以到多少?在板卡級壓縮圖像,高分辨率圖像最高頻率可以達到多少?
A3:高速采集方案的幀頻并不是一個固定值,而是根據所選的接口帶寬以及傳輸的數據量、分辨率、格式等有關。由下圖可知,當您選擇不同的接口的時候,其帶寬和幀頻都有較大差別。而在帶寬固定的前提下,圖像的分辨率越小、幀率則越高。比如你選擇萬兆10GigE接口,分辨率1024×1024,那么幀率最高可以達到千幀。對于千幀的解決方案,可以在FPGA上進行分割和采圖。

如果只是進行圖像數據量的壓縮,本身不改變數據的幀頻,僅改變數據量的大小。
Q4:鋰電池極片壓縮前后的數據量變化對檢測精度有影響嗎?
A4:采用無損壓縮對圖像質量是沒有影響的,也可以支持無損解壓縮,不會影響檢測精度。
Q5:你們的邊緣計算機最多可以連接多少相機,采集端是怎么處理的?
A5:這個取決于用戶選用的型號。比如下圖中我們選用的是FantoVision 20系列的邊緣計算機,包含2個萬兆口,最多可以連接2臺萬兆相機,或4臺5GigE相機,或16臺千兆以太網相機。CameraLink接口的邊緣計算機也可以連接單臺全模式相機、或2臺CameraLink的Base模式相機。
工作模式:在處理端基于NVIDIA Jetson來做,前端采集軟件采集到數據流并輸入到設備、接入Jetson,利用專門的算法進行數據處理,例如可以直接使用Jetson的CUDA進行AI算法的編程。此外,英偉達的算法庫也可以直接集成到我們的設備上。

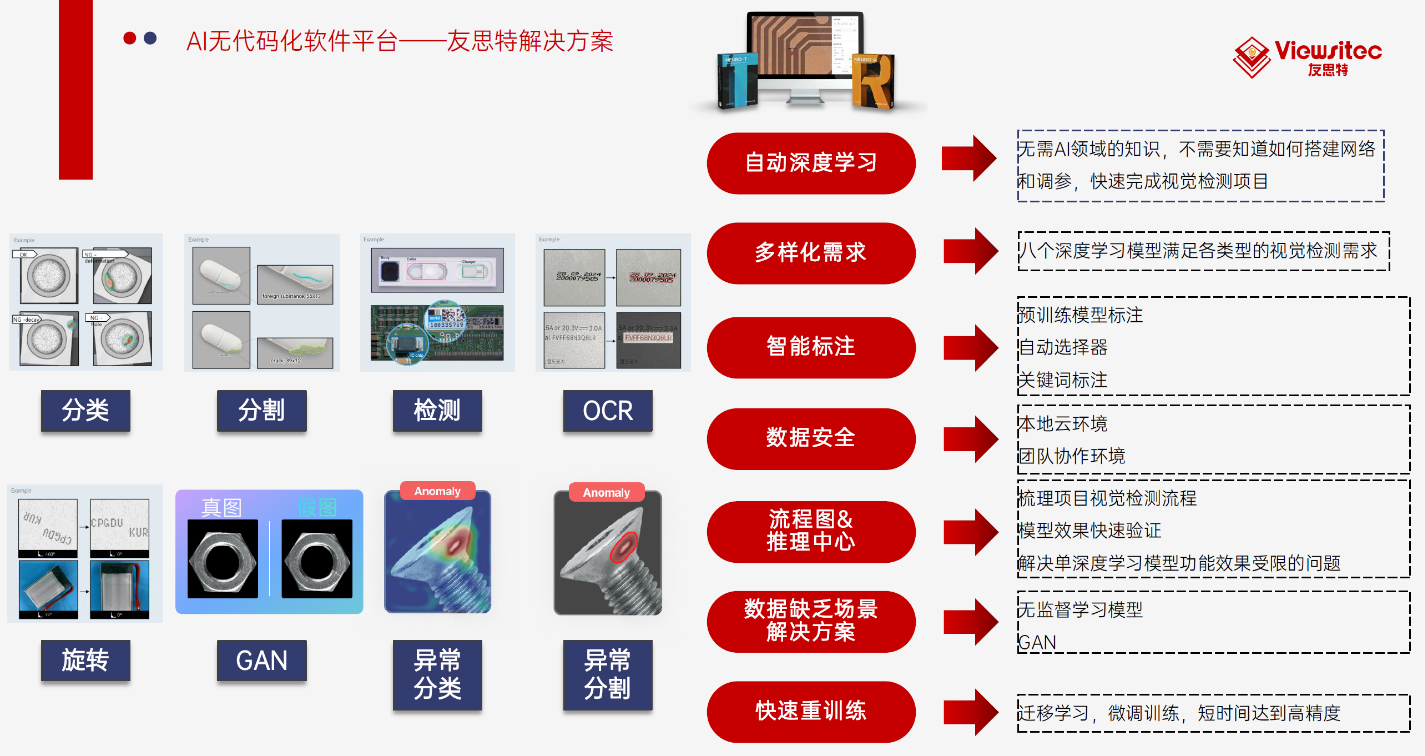
第三講-瞬時糾錯的智慧算法:多類型視覺檢測助力高質高效產線生產
Q1:這個AI視覺軟件訓練一般需要多少張圖像?訓練時間大概會是多長?可以免費試用嗎?
A1:AI視覺軟件的訓練時間和模型、電腦配置(GPU、CPU性能)有較大關系。普通的比較簡單的需求,大約幾十張即可完成訓練,稍微復雜一些可能需要200張,更復雜則可能需要500張左右。至于訓練時間,分類模型幾分鐘就能完成,目標檢測、分割或者多種模型組合使用的話,所需訓練時間更長,幾小時到十幾小時不等。實際應用中,我們會根據需求為客戶提供免費試用的支持。
Q2:你們現在方案可以覆蓋的視野有多大?可以用到大視野場景嗎?有沒有軟件支持?
A2:目前我們的3D視覺方案在高精度的要求下可以支持300mm的視野,如果精度要求沒那么高,那么視野就可以達到3m左右。如果在大視野場景想實現高精度檢測,我們可以做多3D設備的標定,而后融合多視野,這種方式也提供配套硬件的軟件支持。
Q3:視覺識別的視野可以進行精準控制嗎?
A3:視覺識別的視野可以由軟件直接設定ROI,或通過控制工作距離來調整,比如用3D設備檢測不同區域的螺絲裝配時,采用的就是ROI的不同設置,實現不同區域的掃描,也可以在同一區域進行重復掃描,以提升該區域的檢測精度。
Q4:電池外觀和內部多類型缺陷AI視覺檢測方案需要哪些硬件支持?
A4:常見的場景中,硬件支持主要是的成像采集設備,比如2D/3D、近紅外或高光譜等其他類型相機,根據具體應用場景和參數需求決定。圖像采集后即可傳輸到計算機上,通過部署的軟件算法開始識別。此外也需鏡頭、光源、光源控制器作為成像的輔助設備。
特殊場景中,如果目標物是卷筒式形態,則需要結合線掃相機做移動式掃描,形成2D的規整圖像。
Q5:鋰電池外觀3D缺陷檢測圖像取圖和處理大概要多久?節拍這一塊最大支持做到多少PPM?
A5:這取決于對缺陷的檢測視野和精度需求,一般是在 200ms-5s之間。展開來講,在1毫米左右的精度要求下,我們能實現200毫秒呈現1張圖像(即1秒鐘處理5次圖像),但其質量肯定不如10μm的高精度圖像質量更高,后者每張的成像時間雖然需要幾秒鐘,但其點云數量更多,能夠做的后續分析也更豐富。總之,檢測難度和精度不同,所需檢測時間都不相同。
Q6:鋰電池極片涂布缺陷檢測怎么實現多傳感器數據融合?
A6:我們視覺方案的配套軟件中具有多傳感器視野融合的功能,直接通過軟件就可以實現。
Q7:OLED剝落檢測的靈敏度可以達到多少?
A7:一般檢測準確率可以達到99.9%以上,詳細的項目需求可以與我們深入溝通。
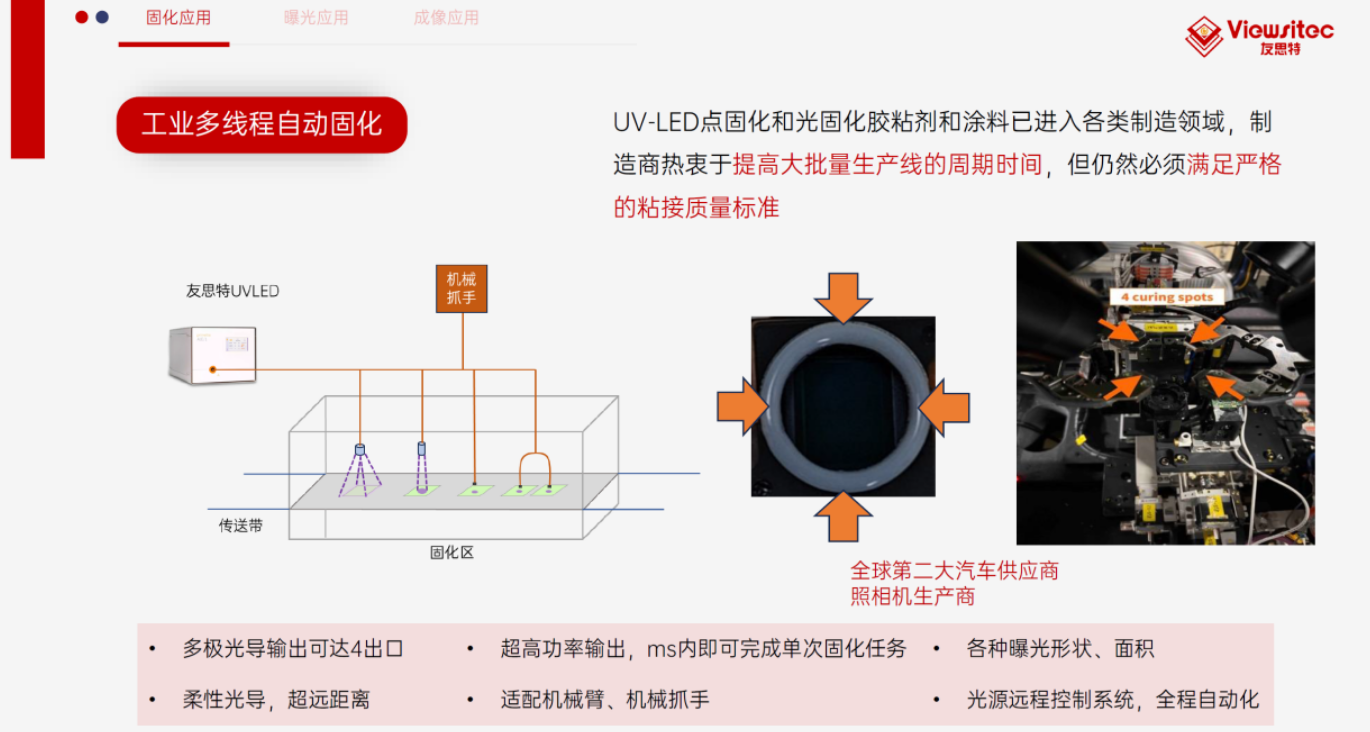
第四講-精密制程的光影貼合:半導體制造中的高功率紫外光源
Q1:這個方案覆蓋深紫外嗎?做不做深紫外曝光?
A1:我們現在的方案中暫時不覆蓋深紫外,因為UVLED在深紫外的功率較低。目前我們的光源主要覆蓋365/385/405nm這幾個UVA波段的紫外曝光。不過明年二季度或三季度,我們會推出深紫外波段的紫外曝光系統,覆蓋280-300nm左右,屆時您可以再關注我們的最新方案。
Q2:大面積的曝光機器能做嗎?300mm2的照射面積
A2:可以實現這種12寸的曝光面積。采用365nm波段的設備,大約可以實現30-40cm2的曝光密度。若面積更大(350-400mm2),就需要結合具體波長、工作距離等工藝參數來定制大面積的曝光方案,這些精密化的設計是為了確保曝光面積和曝光強度符合項目需求。
Q3:固化方案最多可以設計幾個出口呢?同時滿足多少個曝光點?
A3:固化方案現階段最多是“一出四”,也就是同時設計4個出口、曝光4個點。除此之外也包括“一出一”和“一出二”的選項。對于多極曝光,通常采用“一出二”或“一出四”即可滿足需求。
審核編輯 黃宇
-
鋰電池
+關注
關注
260文章
8124瀏覽量
170412 -
新能源電池
+關注
關注
6文章
160瀏覽量
12881
發布評論請先 登錄
相關推薦
普源精電解決方案巡回研討會圓滿落幕
2025電子設計與制造技術研討會
2024 TI高壓研討會精彩回顧
羅德與施瓦茨JCAS技術研討會精彩回顧
飛騰成功舉辦散熱技術應用發展研討會
精彩回顧 : 向新而行 云啟未來——2024高云FPGA線上技術研討會

一文讀懂CAN XL!萬字干貨,虹科CAN XL研討會問答,你想知道的都在這里!
思瑞浦車規級產品矩陣,全面覆蓋汽車級CAN&amp;amp;LIN、LDO需求

上能電氣亮相2024分布式光儲市場研討會
凱米斯邀您回顧水環境智能運維交流研討會


樂鑫云方案研討會回顧|ESP RainMaker? 引領創業潮,賦能科創企業

啟揚智能受邀參加2024恩智浦技術巡回研討會

回顧:高云半導體成功舉辦22nm產品及方案研討會






 工商網監
工商網監
評論